Wetenschap
Reviewpaper:Tiny biohybride robots voor intelligente medicijnafgifte
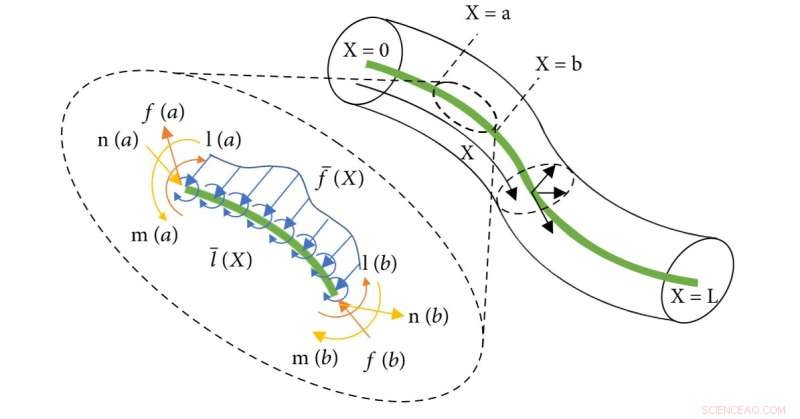
Diagram van krachtanalyse van continue media. Krediet:Cyborg en Bionic Systems (2022). DOI:10.34133/2022/9783517
Een overzichtsartikel van wetenschappers van de Zhejiang University vatte de ontwikkeling van continuümrobots samen vanuit de aspecten ontwerp, bediening, modellering en controle. De nieuwe review paper, gepubliceerd op 26 juli in het tijdschrift Cyborg and Bionic Systems , gaf een overzicht van de klassieke en geavanceerde technologieën van continuümrobots, samen met enkele vooruitzichten die dringend moeten worden opgelost.
"Sommige kleinschalige continuümrobots met nieuwe bedieningsmethoden worden op grote schaal onderzocht op het gebied van interventionele chirurgische behandeling of endoscopie, maar de karakterisering van mechanische eigenschappen ervan is nog steeds een ander probleem", verklaarde studieauteur Haojian Lu, een professor aan de Universiteit van Zhejiang.
Om de miniaturisering van continuümrobots te realiseren, zijn veel geavanceerde materialen ontwikkeld en gebruikt om de aansturing van robots te realiseren, met unieke voordelen. De continuümrobots ingebed met micromagneet of gemaakt van ferromagnetisch composietmateriaal hebben een nauwkeurig stuurvermogen onder een extern bestuurbaar magnetisch veld; Magnetisch zachte continuümrobots kunnen daarentegen kleine diameters bereiken, tot op micronschaal, wat hun vermogen garandeert om gerichte therapie uit te voeren in bronchiën of in cerebrale vaten.
Het is echter moeilijk voor magnetisch zachte continuümrobots om de stabiliteit te behouden onder externe krachten, en de kleine stijve magneetpunten lopen het risico dat ze tijdens het gebruik in het lichaam vallen. Voor een veiligere en betrouwbaardere besturing worden vormgeheugenmaterialen gebruikt om de continuümrobot aan te drijven en voor cardiovasculair onderzoek en nasofaryngeale toediening. Het belangrijkste voordeel van dit zelfvervormende materiaal is dat het zorgt voor extensie, buiging en torsie van de hoofdsteel en algemene bediening kan bereiken met behoud van een kleine schaal, maar de inherente hysterese maakt het moeilijk om een snelle respons en nauwkeurige positionering aan de tegelijkertijd, en het heeft een lage belastingscapaciteit en vrij complexe pijpleidingbedrading.
Gezien de niet-lineaire vervormingen die worden veroorzaakt door bediening, materiaalelasticiteit en gevoeligheid voor contact met de omgeving, staan continuümrobots voor grote uitdagingen bij nauwkeurige analytische modellering.
Een van de grootste uitdagingen bij het modelleren is het vereenvoudigen van de modellen en het compromitteren van de relatie tussen rekencomplexiteit en modelnauwkeurigheid.
Evenzo is het besturingsprobleem ook een grote uitdaging voor de continuümrobot. De uitdaging is om de juiste activeringswaarde te vinden om de gewenste toestand te bereiken om een bepaalde taak uit te voeren. Modelgebaseerde besturing is sterk afhankelijk van de precieze modellering van de continuümrobot en de waarnemingsnauwkeurigheid van de sensoren. Daarnaast wordt bediening op afstand vaak gebruikt om de continuümrobot in de medische wereld te besturen.
"Het onderzoeksgebied van continuümrobots heeft grote vooruitgang geboekt, maar er zijn nog enkele problemen die moeten worden opgelost, waaronder de miniaturisatie, krachtigere waarneming en de stabiele simulatie-engine", zei Lu. + Verder verkennen
Hoe een slanke, slangachtige robot artsen nieuwe manieren kan bieden om levens te redden
 Welke chemicaliën make-up Mercurys-atmosfeer?
Welke chemicaliën make-up Mercurys-atmosfeer? - Polymeren voorkomen mogelijk gevaarlijke nevel tijdens tandartsbezoek
- Nieuwe techniek produceert lithiumbatterijen met een langere levensduur
- Soorten luchtverontreiniging: smog en zure regen
- Industrieklaar proces maakt kunststoffen chemisch uit plantensuikers
- Hevige stormen scheuren door Grieks toeristengebied, zes doden
- Extreem weer en geopolitiek belangrijke aanjagers van toenemende voedselschokken
- Bloomberg belooft $ 500 miljoen om klimaatverandering te bestrijden
- NASA volgt tropische storm Franklin
- Tekenen van eerdere mega-bevingen in Californië tonen het gevaar van de Big One op San Andreas Fault
Hoofdlijnen
- Hoe HeLa-cellen werken
- Insect Compound Eye vs. Human Eye
- Deze spinnenetende, nestdelende vleermuis was ooit veilig voor vuur, totdat de Black Summer zijn regenwouden verbrandde
- Uit een grootschalig onderzoek blijkt dat veel geplande wegen in de tropen niet gebouwd mogen worden
- Wetenschappers brengen nieuwe inzichten in de erfelijkheid van de ernst van de hiv-infectie
- Onderzoekers melden snellere screening van fotobescherming in gewassen
- Pythons zijn echte verstikkende artiesten:grootte alleen verklaart niet hoe ze zulke grote prooien kunnen eten
- Een model waarmee planten hun fotosynthetische stofwisseling aanpassen aan de lichtintensiteit
- Wetenschappers ontdekken dat de meeste blauwe vinvissen rechtshandig zijn, behalve wanneer ze omhoog zwemmen
- Een homogene hooiberg voorbereiden

- Gelaagde halfgeleiders met magnetische interfaces zijn krachtige katalysatoren voor het opvangen van zonne-energie, conversie
- Kleinste Zwitsers kruis - gemaakt van 20 enkele atomen
- Onderzoekers slagen erin twee typen elektron-gat-paren te koppelen
- Goud voegt de glans van omkeerbare montage toe aan eiwitkooien


 Nieuwe inzichten in memristieve apparaten door beginnende ferro-elektriciteit en grafeen te combineren
Nieuwe inzichten in memristieve apparaten door beginnende ferro-elektriciteit en grafeen te combineren- Uit gegevens blijkt dat advies aan vrouwen om voorover te leunen, zelfverzekerder zijn helpt niet
- Astronomen vinden mogelijke oplossing voor de vorming van planeten
- Neutronenverstrooiing verduidelijkt de rangschikking van skyrmionen in materiaal
- Twee robots zijn beter dan één voor onderzoek naar 5G-antennemetingen van NIST
- Wetenschappers ontwikkelen een aanpak om onconventionele nanolegeringen te synthetiseren voor elektrokatalytische toepassing
- Nanometrische koolstofnitride-fotokatalysatoren met à-la-carte-eigenschappen
- Klimaatstudie kijkt naar blootstelling van mensen aan extreme temperaturen in de 21e eeuw
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
