Wetenschap
Pulsgestuurde robot:beweging via solitaire golven
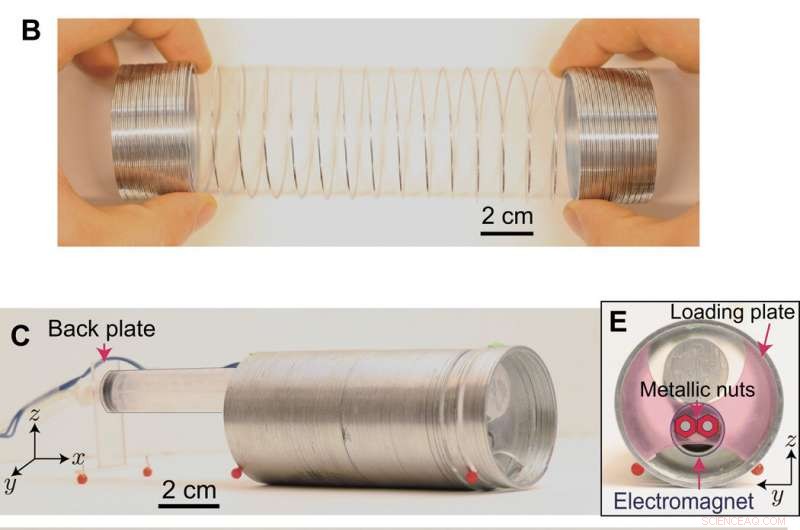
De Slinky-robot. (A) Schematische weergave van het locomotiefmechanisme van een regenworm op basis van retrograde peristaltische golven (d.w.z. golven die zich in de tegenovergestelde richting van de voortbeweging voortplanten). (B) Afbeelding van metalen Slinky die in deze studie is gebruikt. (C en D) Foto's van onze Slinky-robot (C) voor en (D) nadat de pneumatische actuator langwerpig is. (E) Vooraanzicht van de Slinky-robot met de elektromagneet. Houd er rekening mee dat er meerdere rode plastic bollen op de Slinky zijn gelijmd om te voorkomen dat deze gaat rollen. Fotocredit:Bolei Deng, Harvard universiteit. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aaz1166
Wetenschappers hebben onlangs de unieke eigenschappen van niet-lineaire golven onderzocht om een breed scala aan toepassingen mogelijk te maken, waaronder impactbeperking, asymmetrische transmissie, schakelen en focussen. In een nieuwe studie die nu is gepubliceerd op wetenschappelijke vooruitgang , Bolei Deng en een team van onderzoekswetenschappers aan Harvard, CNRS en het Wyss Institute for Biologically Inspired Engineering in de VS en Frankrijk maakten gebruik van de voortplanting van niet-lineaire golven om flexibele structuren te laten kruipen. Ze combineerden bio-geïnspireerde experimentele en theoretische methoden om te laten zien hoe een dergelijke pulsgestuurde voortbeweging een maximale efficiëntie kon bereiken wanneer de geïnitieerde pulsen solitonen waren (solitaire golf). De eenvoudige machine die in het werk werd ontwikkeld, kon over een breed scala aan oppervlakken bewegen en verder sturen. De studie breidde de verscheidenheid aan mogelijke toepassingen met niet-lineaire golven uit om een nieuw platform voor flexibele machines te bieden.
Flexibele structuren die in staat zijn tot grote vervormingen, trekken interesse in bio-engineering vanwege hun intrigerende statische respons en hun vermogen om elastische golven met grote amplitude te ondersteunen. Door hun geometrie zorgvuldig te controleren, het elastische energielandschap van sterk vervormbare systemen kan worden ontworpen om een verscheidenheid aan niet-lineaire golven voort te planten, waaronder vectorsolitonen, overgangsgolven en verdunningspulsen. Het dynamische gedrag van dergelijke structuren laat een zeer rijke fysica zien, terwijl het nieuwe mogelijkheden biedt om de voortplanting van mechanische signalen te manipuleren. Dergelijke mechanismen kunnen unidirectionele voortplanting mogelijk maken, golfgeleiding, mechanische logica en mitigatie, onder andere toepassingen.
In dit werk, Deng et al. werden geïnspireerd door de biologische retrograde peristaltische golfbeweging in regenwormen en het vermogen van lineaire elastische golven om beweging te genereren in ultrasone motoren. Het team toonde de voortplanting van niet-lineaire elastische golven in flexibele structuren om mogelijkheden voor voortbeweging te bieden. Als proof-of-concept, ze richtten zich op een Slinky - en gebruikten het om een pulsgestuurde robot te maken die zichzelf voort kan stuwen. Ze bouwden de eenvoudige machine door de Slinky aan te sluiten op een pneumatische actuator. Het team gebruikte een elektromagneet en een plaat ingebed tussen de lussen om niet-lineaire pulsen te initiëren die zich van voren naar achteren langs het apparaat voortplanten. waardoor de pulsrichting de eenvoudige robot dicteert om vooruit te gaan. De resultaten gaven aan dat de efficiëntie van dergelijke pulsgestuurde voortbeweging optimaal is met solitonen - niet-lineaire pulsen met grote amplitude met een constante snelheid en stabiele vorm langs voortplanting. De studie breidde toepassingen van solitaire golven (solitonen) uit en liet zien hoe ze kunnen worden onderzocht als eenvoudige onderliggende motoren om flexibele machines te helpen bewegen.
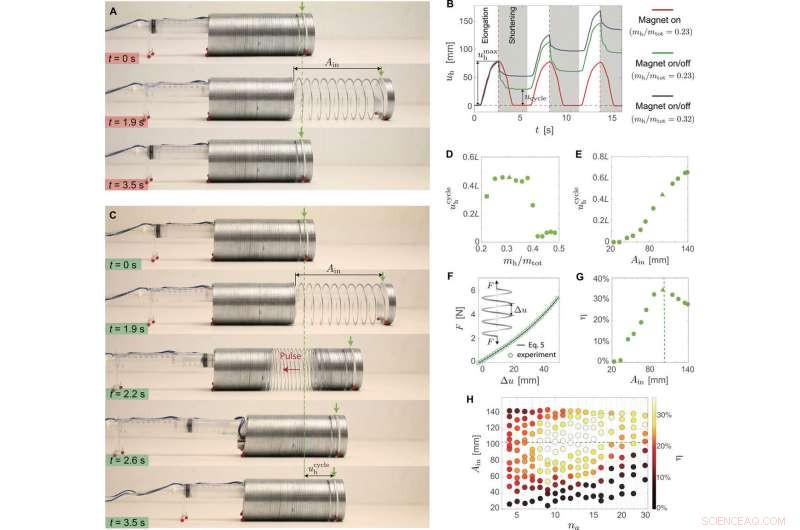
Prestaties van de Slinky-robot. (A) Snapshots gemaakt tijdens een test waarin we de voorste 10 lussen verlengen tot Ain =100 mm terwijl we de elektromagneet aanhouden. (B) Verplaatsing van de kop gedurende drie cycli voor tests waarbij (i) mh/mtot =0,23 en we houden de elektromagneet aan (rode lijn), (ii) mh/mtot =0.23 en we zetten de elektromagneet uit na het uitrekken (groene lijn), en (iii) mh/mtot =0,32 en we zetten de elektromagneet uit na het uitrekken (blauwe lijn). (C) Snapshots genomen tijdens een test waarin Ain =100 mm en we zetten de elektromagneet uit na het uitrekken van de voorste lussen. (D) Evolutie van u cyclus h als functie van mh/mtot voor proeven waarbij Ain =100 mm. De vierkante en driehoekige markeringen komen overeen met mh/mtot =0,23 en 0,32, respectievelijk. (E) Evolutie van u-cyclus h als functie van Ain voor tests waarin mh/mtot =0,32. De driehoekige markering komt overeen met Ain =100 mm. (F) Statische respons van de Slinky zoals gemeten in een uniaxiale test. (G) Evolutie van η als functie van Ain voor tests waarin mh/mtot =0,32. De driehoekige markeringen komen overeen met Ain =100 mm. De groene stippellijn komt overeen met de amplitude van de ondersteunde soliton, Als. (H) Evolutie van η als functie van na en Ain voor proeven waarbij mh/mtot =0,32. Fotocredit:Bolei Deng, Harvard universiteit. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aaz1166
Om de Slinky-robot te maken, Deng et al. gebruikte een metalen Slinky met een lengte van 50 mm en 90 lussen, om vervolgens te testen en te begrijpen hoe de intrinsieke flexibiliteit ervan kan worden onderzocht, en maak een eenvoudige machine die in staat is om te bewegen. Ze verbonden twee slinkies in serie (100 mm, 180 lussen) voor een eenvoudige activeringsstrategie op basis van een pneumatische actuator, een elektromagneet en drie acrylplaten. Ze konden de opstelling uitrekken en verkorten met behulp van de pneumatische actuator terwijl de elektromagneet aan bleef. Het team testte de reactie van de machine door deze op een glad oppervlak te plaatsen en deze te bewaken met een hogesnelheidscamera. Deng et al. schakelde vervolgens het magnetische veld uit in een poging de symmetrie te doorbreken en de machine te laten kruipen. Ze observeerden geen gereflecteerde golf in de Slinky vanwege de grote energiedissipatie bij botsing van de lussen, maar observeerden in plaats daarvan een duidelijke voorwaartse beweging van de robot. Het team onderzocht daarom de directionaliteit die wordt geïntroduceerd door de elastische golven om de robot te laten bewegen, zelfs in de aanwezigheid van identieke wrijvingscoëfficiënten.
Voortplanting van niet-lineaire golven. Een slinky met 90 lussen wordt van het substraat getild en ondersteund door een plastic staaf om de wrijving te minimaliseren. Door 10 lussen aan de voorkant voor te rekken en de magnetische elektromagneet uit te schakelen, initiëren we elastische golven die zich naar achteren voortplanten. De groene markeringen worden gebruikt om de verplaatsing van elke andere lus te volgen. Bekijk de volledige film op Credit:Science Advances, doi:10.1126/sciadv.aaz1166
Pogingen om de flexibele machine te laten kruipen via elastische pulsen lieten echter zien dat de experimentele omstandigheden suboptimaal waren. Bijvoorbeeld, ze merkten terugglijden onmiddellijk na het uitschakelen van de elektromagneet. Om deze beweging te beperken, Deng et al. verhoogde de massa aan het hoofd van de Slinky-robot terwijl de waarde werd geoptimaliseerd om een optimaal bereik te identificeren. De Slinky handhaafde 10 lussen tussen de voor- en laadplaten in de opstelling. Het team wees de maximale afstand tussen de laad- en frontplaten aan als A in , die ongeveer 100 mm bedroeg. Om te begrijpen hoe de efficiëntie van de robot een maximum was voor A in =100 mm Deng et al. zorgvuldig onderzocht de voortplanting van pulsen met grote amplitude door de Slinky.
Voor deze experimenten is ze concentreerden zich op een enkele Slinky en bewaakten de positie van groene markeringen bij elke andere lus. Vervolgens begonnen ze elastische golven die zich naar achteren voortplantten door 10 lussen aan de voorkant voor te rekken en de elektromagneet uit te schakelen. Dankzij de tests kon het team diepere inzichten verwerven in de voortplanting van pulsen door de verplaatsing van elke lus te volgen. De wetenschappers realiseerden zich twee hoofdkenmerken van de robot; 1) de zich achterwaarts voortplantende golven bewogen het massamiddelpunt van de Slinky naar voren en 2) de Slinky ondersteunde de voortplanting van solitaire golven met grote amplitude.
Voor na =4 zijn de pulsen te sterk, en hun energie verdwijnt via botsingen tussen de lussen. Voor na =30 zijn de pulsen te zwak en planten ze zich nauwelijks voort. Bekijk de volledige film op Credit:Science Advances, doi:10.1126/sciadv.aaz1166
Om meer inzicht te krijgen in de experimentele resultaten, Deng et al. ontwikkelde een wiskundig model dat de massa en elasticiteit van een individuele lus weergeeft. De berekende resultaten kwamen uitstekend overeen met de experimentele uitkomsten en het model bevestigde de experimentele waarnemingen. De analyse bevestigde verder dat de efficiëntie van de Slinky-robot maximaal was wanneer de geïnitieerde golven solitons waren. De niet-dispersieve aard en compactheid van solitaire pulsen maakte ze uiterst efficiënt om de energie die door de pneumatische actuator wordt geleverd in beweging te brengen om de meest efficiënte pulsgestuurde voortbeweging te verkrijgen.
Op deze manier, Deng et al. toonde aan hoe achterwaarts voortplantende solitonen een Slinky-robot efficiënt vooruit konden bewegen. Hoewel ledematenloze organismen eerder bio-geïnspireerde ingenieurs hebben om een verscheidenheid aan robots te ontwerpen, het team gelooft dat dit werk het eerste robotsysteem is dat vertrouwt op elastische pulsen om te bewegen. De principes die in het onderzoek werden gepresenteerd, waren anders dan die van ultrasone motoren, omdat de flexibele Slinky-robot niet-lineaire pulsgolven gebruikte om de positie van het massamiddelpunt te veranderen, ultrasone motoren worden daarentegen aangedreven door lineaire sinusoïdale golven. Het team concentreerde zich in dit werk alleen op rechtlijnig voorwaarts kruipen, maar ze kunnen de flexibiliteit van de Slinky verkennen om een reeks bewegingen te bereiken.
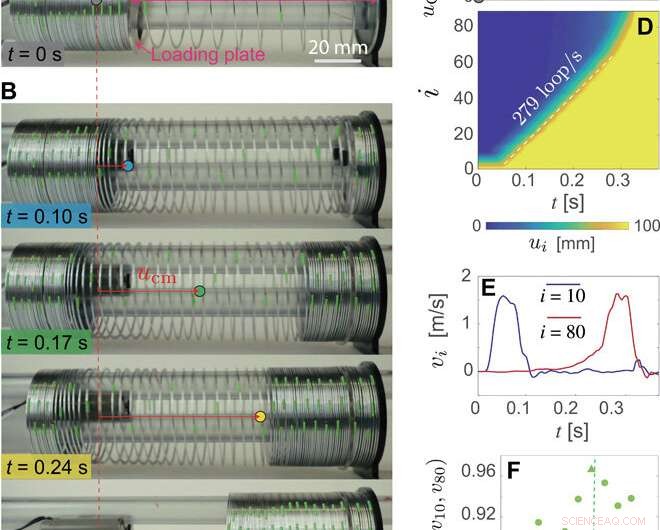
Golfvoortplanting in de Slinky. (A) Experimentele opstelling die werd gebruikt om de voortplanting van pulsen in de metalen Slinky te testen. Op t =0 s, na =10 lussen tussen de laadplaat en de voorkant van de Slinky zijn uitgerekt tot Ain =100 mm. (B) Momentopnamen van de voortplanting van de puls in de Slinky op t =0,10, 0,17, 0,24, en 0,34 s. De cirkelvormige markeringen geven de posities van het zwaartepunt van de Slinky aan. (C) Verplaatsing van het zwaartepunt van de Slinky, uCM, als functie van de tijd. Ronde markeringen komen overeen met de tijdstippen die worden beschouwd in (A) en (B). (D) Spatiotemporele verplaatsingsdiagram van de voortplantingspuls. (E) Snelheidssignalen gemeten bij de 10e en 80e lussen. (F) Evolutie van de kruiscorrelatie van v10 (t) en v80 (t) als functie van de ingangsamplitude Ain. De driehoekige markering komt overeen met Ain =100 mm. De groene stippellijn komt overeen met de amplitude van de ondersteunde soliton, Als, voorspeld door vergelijkingen afgeleid in de studie. Fotocredit:Bolei Deng, Harvard universiteit. Krediet:wetenschappelijke vooruitgang, doi:10.1126/sciadv.aaz1166
Het team wil vervolgens de robot besturen door de laatste lus aan de achterkant van het apparaat te draaien en de stuurhoek te regelen, terwijl de nadruk wordt gelegd op de bestaande mogelijkheid om de robot over een breed scala aan oppervlakken te verplaatsen. Hoewel Deng et al. alleen een Slinky gebruikt om pulsgestuurde voortbeweging te realiseren in dit werk, de principes zijn algemeen en kunnen worden uitgebreid tot een breed scala aan rekbare systemen over verschillende schalen om wegen te openen voor microschaalcrawlers die geschikt zijn voor medische toepassingen.
© 2020 Wetenschap X Netwerk
 Sri Lankaanse functionarissen zetten zich schrap voor olielek van zinkend schip
Sri Lankaanse functionarissen zetten zich schrap voor olielek van zinkend schip- Geowetenschapper hoopt geïnduceerde aardbevingen voorspelbaar te maken
- De hoofdstad van Zimbabwe droogt op door het afsluiten van de kraan voor 2 miljoen mensen
- Wanneer droogte gewassen bedreigt:rol van NASA bij hongersnoodwaarschuwingen
- Verloren nanoplastic uit de oceaan kan vast komen te zitten aan kusten
Hoofdlijnen
- Zijn kleine populieren de toekomst van biobrandstoffen? Studies zeggen ja
- Vier belangrijke soorten chromosomen
- Genetische aandoeningen: definitie, oorzaken, lijst met zeldzame en veel voorkomende ziekten
- Kan een viraal genoom worden gemaakt van zowel DNA als RNA?
- Domme mensen zijn verrassend zelfverzekerd
- Wat zijn de voor- en nadelen van endotherm zijn?
- Onderzoek suggereert dat gevaarlijke gewassenschimmel giftige chemicaliën produceert om insecten af te weren
- Kunnen we Neanderthalers terugbrengen?
- Lood visgerei kan een bedreiging vormen voor de populaties van duikers
- Geluid en licht gebruiken om ultrasnelle gegevensoverdracht te genereren

- Onderzoek levert significante thermo-elektrische prestaties op

- Een klein kristalapparaat zou zwaartekrachtgolfdetectoren kunnen stimuleren om de geboortekreten van zwarte gaten te onthullen
- Compacte glasvezelsensor biedt gevoelige analyse in nauwe ruimtes

- Twee atomen gecombineerd in dipolaire molecule

 Hoe interferometrie werkt, en waarom het zo krachtig is voor de astronomie
Hoe interferometrie werkt, en waarom het zo krachtig is voor de astronomie- Onderzoekers onderzoeken hoe burgers agenten van milieuverandering kunnen worden
- Amerikaanse steden in het noordwesten jammerlijk onvoorbereid naarmate het brandrisico toeneemt
- Nitraat verwijderen voor gezondere ecosystemen
- Religieuze overtuiging aan het einde van het leven verandert wereldwijd
- Kwantumstap voorwaarts in het beschermen van communicatie tegen hackers
- Oceaanwateren voorkomen het vrijkomen van oud methaan
- Nieuwe studie toont aan dat wetenschappers die selfies meer vertrouwen van het publiek winnen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
