Wetenschap
Geavanceerde robotica om de translationele kloof in peestechniek aan te pakken:Review paper
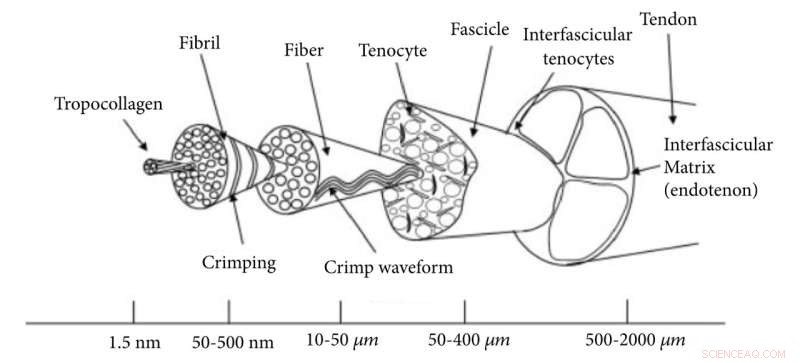
Hiërarchische structuur van peesweefsel (aangepast van Thorpe et al). Krediet:Cyborg en Bionic Systems (2022). DOI:10.34133/2022/9842169
Een overzichtsartikel van wetenschappers van de Universiteit van Oxford besprak mogelijke voordelen van het gebruik van humanoïde musculoskeletale robots en zachte robotsystemen als bioreactorplatforms bij het produceren van klinisch bruikbare peesconstructies.
De nieuwe review paper, gepubliceerd op 15 september 2022 in het tijdschrift Cyborg and Bionic Systems , vat de huidige trends in peesweefselengineering samen en bespreekt hoe conventionele bioreactoren geen fysiologisch relevante mechanische stimulatie kunnen bieden, aangezien ze grotendeels afhankelijk zijn van uniaxiale trekfasen. De paper belicht vervolgens musculoskeletale humanoïde robots en zachte robotsystemen als platforms voor het leveren van fysiologisch relevante mechanische stimulatie die deze translationele kloof zou kunnen overbruggen.
Pees- en weke delenletsels vormen een groeiend sociaal en economisch probleem, waarbij de markt voor peesherstel in de Verenigde Staten wordt geschat op $ 1,5 miljard USD. Peeshersteloperaties hebben een hoge mate van revisie, waarbij meer dan 40% van de rotator cuff-reparaties postoperatief mislukken. De productie van gemanipuleerde peestransplantaten voor klinisch gebruik is een mogelijke oplossing voor deze uitdaging. Conventionele peesbioreactoren zorgen voornamelijk voor uniaxiale trekstimulatie. Het ontbreken van systemen die in vivo peesbelasting recapituleren is een grote translationele kloof.
"Het menselijk lichaam voorziet pezen van driedimensionale mechanische stress in de vorm van spanning, compressie, torsie en afschuiving. Huidig onderzoek suggereert dat gezond inheems peesweefsel meerdere soorten en richtingen van stress vereist. Geavanceerde robotsystemen zoals musculoskeletale humanoïden en zachte robotica veelbelovende platforms die in vivo peesbelasting kunnen nabootsen", legt auteur Iain Sander uit, een onderzoeker aan de Universiteit van Oxford bij de Soft Tissue Engineering Research Group.
Musculoskeletale humanoïde robots werden oorspronkelijk ontworpen voor toepassingen zoals crashtestdummies, protheses en atletische verbetering. Ze proberen de menselijke anatomie te imiteren door vergelijkbare lichaamsverhoudingen, skeletstructuur, spieropbouw en gewrichtsstructuur te hebben. Musculoskeletale mensachtigen zoals Roboy en Kenshiro gebruiken peesaangedreven systemen met myorobotische actuatoren die menselijk neuromusculair weefsel nabootsen.
Myorobotic-eenheden bestaan uit een borstelloze gelijkstroommotor die spanning genereert zoals menselijke spieren, bevestigingskabels die fungeren als de peeseenheid, en een motoraandrijfbord met een veer-encoder, die fungeert als het neurologische systeem door variabelen te detecteren, waaronder spanning, compressie, spierlengte , en temperatuur.
Voorgestelde voordelen van musculoskeletale humanoïden zijn onder meer de mogelijkheid om multiaxiale belasting te bieden, potentieel voor belasting rekening houdend met menselijke bewegingspatronen en het leveren van belastingsgroottes die vergelijkbaar zijn met in vivo krachten. Een recente studie heeft de haalbaarheid aangetoond van het kweken van menselijk weefsel op een musculoskeletale humanoïde robot voor peestechniek.
Biohybride zachte robotica is gericht op het ontwikkelen van biomimetische, compliant robotsystemen die adaptieve, flexibele interacties met onvoorspelbare omgevingen mogelijk maken. Deze robotsystemen worden aangedreven door een aantal modaliteiten, waaronder temperatuur, pneumatische en hydraulische druk en licht.
Ze zijn gemaakt van zachte materialen, waaronder hydrogels, rubber en zelfs menselijk musculoskeletaal weefsel. Deze systemen worden al gebruikt om mechanische stimulatie te bieden aan constructies van glad spierweefsel en zijn in vivo geïmplementeerd in een varkensmodel.
Deze systemen zijn aantrekkelijk voor peesweefselmanipulatie, aangezien:i) hun flexibele, meegevende eigenschappen hen in staat stellen zich om anatomische structuren te wikkelen, waarbij ze de configuratie van een natuurlijke pees nabootsen ii) ze in staat zijn om multiaxiale activering te bieden en iii) een aantal van de technieken die worden gebruikt in zachte robotica overlapt met de huidige praktijken van peesweefselengineering.
Vooruitkijkend, ziet het team geavanceerde robotsystemen als platforms die een fysiologisch relevante mechanische stimulus zullen geven aan peestransplantaten voorafgaand aan klinisch gebruik. Er zijn een aantal uitdagingen waarmee rekening moet worden gehouden wanneer geavanceerde robotsystemen worden geïmplementeerd. Ten eerste zal het voor toekomstige experimenten belangrijk zijn om de in deze review voorgestelde technologieën te vergelijken met conventionele bioreactoren.
Met de ontwikkeling van systemen die multiaxiale belasting kunnen bieden, zal het belangrijk zijn om methoden te vinden voor het kwantificeren van spanning in 3D. Ten slotte zullen geavanceerde robotsystemen betaalbaarder en toegankelijker moeten zijn voor wijdverbreide implementatie.
"Een toenemend aantal onderzoeksgroepen laat zien dat het haalbaar is om geavanceerde robotica in combinatie met levende cellen en weefsels te gebruiken voor weefselengineering en bioactuatietoepassingen. We bevinden ons nu in een opwindende fase waarin we de verschillende mogelijkheden kunnen onderzoeken om deze technologieën in te bouwen in peesweefselengineering en onderzoeken of ze echt kunnen helpen de kwaliteit van gemanipuleerde peestransplantaten te verbeteren, "zei Pierre-Alexis Mouthuy, senior auteur van het overzichtsartikel.
Op de lange termijn hebben deze technologieën het potentieel om de kwaliteit van leven van individuen te verbeteren, door pijn en het risico op falen van peesherstel te verminderen, voor gezondheidszorgstelsels, door het aantal revisieoperaties te verminderen, en voor de economie, door de productiviteit op de werkplek te verbeteren en kosten van de gezondheidszorg. + Verder verkennen
Een robotschouder gebruiken om peesweefsel te laten groeien

Hoofdlijnen
- Research Paper Topics in Biochemistry
- Goud zeven uit de datastroom
- Biologen krijgen inzicht in repetitieve eiwitsequenties
- Gletsjermuizen bewegen en dat heeft wetenschappers versteld doen staan
- Roofzuchtige bacteriën die patrijspoorten maken en fresco's schilderen in schadelijke bacteriën
- Genomen van wilde tomaten bieden waardevolle hulpbron voor tomatenverbetering
- Camera's leggen openhartig bushmeat-zoogdieren vast voor lokale monitoring van dieren in het wild
- Depolarisatie en repolarisatie van het celmembraan
- Enzymactiviteit in appels
- Een aanpak voor het beveiligen van audioclassificatie tegen aanvallen van tegenstanders
- Opkoopbod Tesla CEO doet wenkbrauwen fronsen juridische zorgen

- Amerikaanse autoarbeiders bij VW-fabriek wijzen bod op vakbond af

- Opkomend tij:Drijvend apparaat een stap dichter bij het opwekken van groene stroom

- Apple patent talk:nog een sleutelloos wonder als de auto je ziet naderen


 Hoe gevaarlijk is microplastic?
Hoe gevaarlijk is microplastic?- Data-eigendom is een recept voor beter leven in de stad
- Waarnemingen van de eerste passage van een komeet door het zonnestelsel onthullen onverwachte geheimen
- Konvooi, de Uber for Trucking-app, scoort $ 400 miljoen in nieuwe financieringsronde
- SOFIA vindt koel stof rond energetische actieve zwarte gaten
- Groot-Brittannië sluit last-minute deal om Flybe vliegend te houden
- Slim textiel:hoogwaardige, ademende stof om kleine elektronica van stroom te voorzien
- Feiten over elektrische energie voor kinderen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
