Wetenschap
LiDAR- en radarsensoren:ruimtebesparende koplampinstallatie
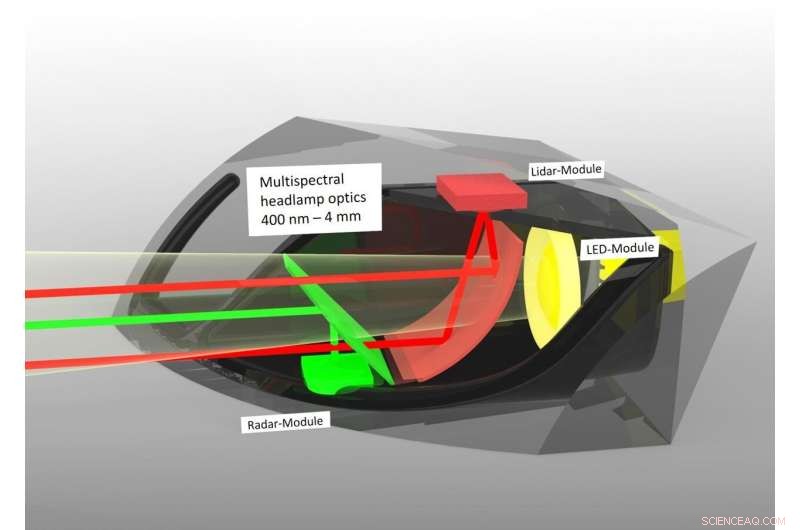
LED-koplampmodel met multispectrale combiners voor het coaxiaal samenvoegen van optisch licht, LiDAR (rood) en radarstralen (groen), met als doel een ruimtebesparende sensorintegratie voor de volgende generatie rijhulpsystemen. Krediet:Fraunhofer FHR
Mensen gebruiken hun ogen en oren om verkeerssituaties met potentieel gevaar op te vangen. Om zelfrijdende voertuigen hetzelfde te laten doen, hebben ze een hele reeks sensoren nodig. Naarmate het aantal sensoren dat ze bevatten echter toeneemt, neemt ook de hoeveelheid ruimte toe die nodig is om ze in te passen - iets dat vaak onverenigbaar is met de visie van ontwerpers.
Nu hebben onderzoekers van de Fraunhofer-Gesellschaft een methode ontdekt om bepaalde sensoren discreet te integreren. Hun oplossing ligt in de koplampen van het voertuig, waar ze optisch licht, radar en LiDAR combineren.
De voertuigen van vandaag kunnen steeds meer functies zelf overnemen zonder tussenkomst van de bestuurder. Cruisecontrol houdt automatisch de juiste afstand tot de voorligger, Lane Departure Warning-systemen corrigeren de rijbaan van de auto indien nodig en een noodremming treedt in werking als de bestuurder wordt overrompeld.
Dit alles is mogelijk dankzij camera's in de passagiersruimte en radarsensoren in de radiatorgrille - en in de toekomst zullen auto's nog meer zelf doen. Om dit mogelijk te maken, moeten er aanzienlijk meer sensoren worden gebruikt, maar grills vol proppen is niet iets dat auto-ontwerpers graag willen entertainen.
Radar- en LiDAR-sensoren geïntegreerd in koplampen
Vijf Fraunhofer-instituten, waaronder het Institute for High Frequency Physics and Radar Techniques FHR, hebben de krachten gebundeld als onderdeel van het Smart Headlight-project om een methode te ontwikkelen om sensoren te installeren die zowel ruimtebesparend als zo subtiel mogelijk is, zonder concessies te doen aan functie of prestatie.
Het doel van het project is om een sensorgeïntegreerde koplamp voor rijhulpsystemen te ontwikkelen die het mogelijk maakt om een reeks sensorelementen te combineren met adaptieve lichtsystemen. Gehoopt wordt dat dit het vermogen van sensoren om objecten op de weg te identificeren, en vooral andere weggebruikers, zoals voetgangers, zal verbeteren. LiDAR-sensoren kunnen bijvoorbeeld worden gebruikt in elektronische remhulp- of afstandscontrolesystemen.
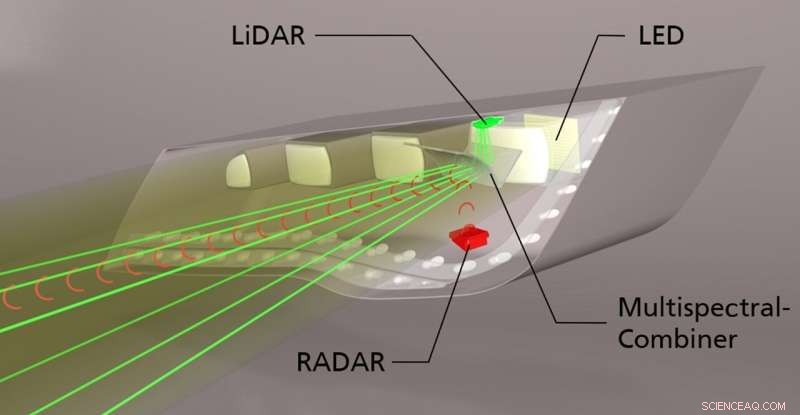
3D-visualisatie van multispectrale koplampoptieken. Krediet:Fraunhofer FHR
"We integreren radar- en LiDAR-sensoren in koplampen die er toch al zijn - en bovendien zijn het de onderdelen die zorgen voor de best mogelijke transmissie voor optische sensoren en lichtbronnen, en die dingen schoon kunnen houden", zegt Tim Freialdenhoven, een onderzoeker bij Fraunhofer FHR. LiDAR-sensoren (Light Detection And Ranging) werken volgens een meetprincipe dat gebaseerd is op het bepalen van de tijd tussen het uitzenden van een laserpuls en het ontvangen van het gereflecteerde licht, een methode die uitzonderlijk nauwkeurige afstandsmetingen oplevert.
De eerste stap bij het maken van koplampsensoren omvat het ontwerpen van een LiDAR-systeem dat geschikt is voor integratie in autotechnologie. Hierbij moet ook rekening worden gehouden met het feit dat het licht dat door de koplamp op de weg wordt gestraald niet kan worden gehinderd door de twee extra sensoren, hoewel de LED's die verantwoordelijk zijn voor het licht ver achter in de koplamp zitten.
Daarom plaatsen de onderzoekers de LiDAR-sensoren bovenaan en de radarsensoren onderaan de koplampbehuizing. Tegelijkertijd moeten de stralen van beide sensorsystemen hetzelfde pad volgen als het LED-licht - iets wat bemoeilijkt wordt door het feit dat alle betrokken stralen verschillende golflengten hebben.
Het zichtbare licht van de koplamp meet in het gebied van 400 tot 750 nanometer, terwijl infrarood LiDAR-stralen variëren van 860 tot 1.550 nanometer, dicht bij het zichtbare bereik. Radarstralen daarentegen hebben een golflengte van vier millimeter. "Deze drie golflengten moeten coaxiaal worden samengevoegd - dat wil zeggen langs dezelfde as - en dit is waar wat we een multispectrale combiner noemen, van pas komt", zegt Freialdenhoven.
Het op deze manier coaxiaal geleiden van de bundels is cruciaal om parallaxfouten te voorkomen, die moeilijk te ontwarren zijn. Bovendien zou het naast elkaar plaatsen van de sensoren aanzienlijk meer ruimte in beslag nemen dan een coaxiale configuratie, dus de onderzoekers omzeilen dit met zogenaamde bi-combiners.
Om LED-licht en LiDAR-licht te combineren, maakt deze oplossing gebruik van een dichroïsche spiegel met een speciale coating, die de twee bundelbundels langs één as geleidt door middel van golflengteselectieve reflectie. Hetzelfde effect gebeurt in de tweede combiner (zij het op een complexere manier vanwege de zeer verschillende golflengten), waar het LED-licht, LiDAR-licht en radar worden gecombineerd.
Aangezien radarsensoren al wijdverbreid worden gebruikt in de automobielsector, moeten bi-combinerontwerpen fabrikanten in staat stellen om bestaande sensoren te blijven gebruiken zonder dat er aanpassingen nodig zijn.
Radarsystemen:doordringen in de mist
Dus waarom überhaupt optische systemen, LiDAR en radar combineren? "Elk afzonderlijk systeem heeft zijn sterke punten, maar ook zijn zwakke punten", legt Freialdenhoven uit.
Optische systemen laten bijvoorbeeld beperkte prestaties zien in situaties met slecht zicht, zoals mistige en stoffige omgevingen. Radarsystemen daarentegen kunnen dichte mistwolken opvangen, maar zijn niet erg goed in categoriseren:hoewel ze kunnen zien of iets een persoon of een boom is, hebben hun capaciteiten niets op LiDAR-systemen.
"We werken ook aan het samenvoegen van gegevens van radar en LiDAR, iets wat een enorme meerwaarde zal zijn, vooral als het gaat om betrouwbaarheid", zegt Freialdenhoven. Het team heeft al een patentaanvraag ingediend en werkt nu hard aan het maken van een prototype.
De technologie zal een hele reeks extra opties creëren voor de integratie van sensoren in rijhulpsystemen. Kleinere lichtmodules, compactere LiDAR-sensoren en geïntegreerde radarsensoren maken het mogelijk om multi-sensorconcepten te creëren, vooral met het oog op zelfrijdende voertuigtechnologie, waar ontwerpeisen strenger worden en installatieruimte beperkt is.
Als gevolg hiervan kunnen toekomstige zelfrijdende systemen mogelijk niet alleen een persoon detecteren, maar ook hun snelheid analyseren, hoe ver weg ze zijn en de hoek waaronder ze zich ten opzichte van het voertuig bevinden. + Verder verkennen
Zware regen beïnvloedt objectdetectie door LiDAR-sensoren van autonome voertuigen
 De impact van toerisme op de duurzaamheid van een vergrijzende gemeenschap in Japan
De impact van toerisme op de duurzaamheid van een vergrijzende gemeenschap in Japan- Ontkenning van klimaatverandering is iets waar we allemaal last van hebben
- Rapport:de meeste landen schieten veel te kort in plannen om de opwarming te beteugelen
- Klimaatverandering verhoogt de koolstofdioxidestroom uit meren
- Naarmate het klimaat warmer wordt, planten kunnen meer water nodig hebben, snijbenodigdheden voor mensen
Hoofdlijnen
- Parasieten van huisdieren die dieren in het wild wereldwijd aantasten
- Kunstmatige selectie (selectieve fokkerij): definitie & voorbeelden
- Planten combineren kleur en geur om bestuivers te verkrijgen
- High School Biology Topics
- Great Basin zaadstudie-experiment richt zich op herstel van weidegronden
- Wat is lachtherapie?
- Persoonlijkheids- en stemmingswisselingen bij bacteriën
- Eerste muismodel met mitochondriale tRNALeu-mutatie ontwikkeld
- Het sociale leven van weesolifanten is aanzienlijk veranderd door stroperij
- Ryanair koopt startup Malta Air om zich te richten op Afrikaanse markten

- UPS krijgt goedkeuring van de overheid om drone-luchtvaartmaatschappij te worden

- Nieuw, realtime melk- en voermeetsysteem helpt de melkproductie te optimaliseren

- Een proces dat de reparatie van vliegtuigonderdelen van koolstofvezel verbetert

- Taxichauffeurs in Athene staken in protest tegen Uber


 Gegevens van een wereldwijde oceanografische expeditie voorspellen hoe stijgende temperaturen de groei van planktonpopulaties beïnvloeden
Gegevens van een wereldwijde oceanografische expeditie voorspellen hoe stijgende temperaturen de groei van planktonpopulaties beïnvloeden- Nieuw rapport onthult epidemische criminaliteit in winkels
- Een stap dichter bij het koolstofarm maken van het langeafstandsvervoer over de weg
- Paleontologen ontdekken nieuwe sauropoden in Argentinië
- Een turbocompressor voor de supercomputer JUWELS
- Onderzoeksteam ontwikkelt klein energiezuinig apparaatje om licht in computerchips snel om te leiden
- Shigella-bacterie maakt gebruik van een fysieke kracht genaamd endocytose in het celmembraan
- Onderzoeksteam brengt nieuwe wereldwijde grondwaterkaarten uit
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
