Wetenschap
Akoestisch aangedreven microrobot overtreft natuurlijke microzwemmers
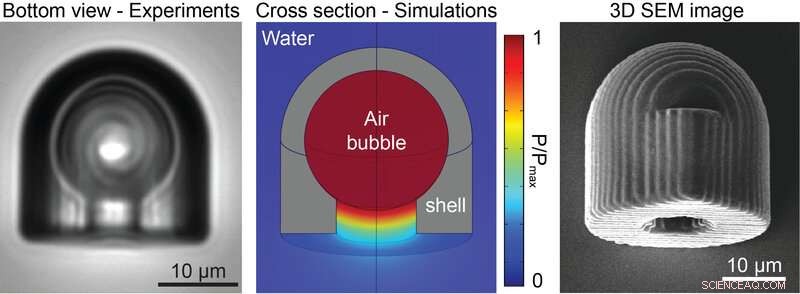
Figuur 1. Microscopiebeeld van de akoestisch aangedreven microrobot met een opgesloten bolvormige luchtbel in zijn lichaam (links); Akoestisch drukveld rond de microrobot voorspeld door de numerieke simulaties (midden); Scanning-elektronenmicroscopiebeeld van de driedimensionaal geprinte microrobot met een scherpe vin bovenaan (rechts). Credit:Max Planck Instituut voor Intelligente Systemen Stuttgart
Onderzoekers van het Max Planck Instituut voor Intelligente Systemen in Stuttgart hebben een ongebonden microrobot ontworpen en gefabriceerd die bij blootstelling aan ultrasone golven langs een plat of gebogen oppervlak in een vloeistof kan glijden. De voortstuwingskracht is twee tot drie orden van grootte sterker dan de voortstuwingskracht van natuurlijke micro-organismen zoals bacteriën of algen. Aanvullend, het kan vracht vervoeren tijdens het zwemmen. De akoestisch aangedreven robot heeft dus een aanzienlijk potentieel om de toekomstige minimaal invasieve behandeling van patiënten te revolutioneren.
Stuttgart—Onderzoekers van het Max Planck Instituut voor Intelligente Systemen (MPI-IS) in Stuttgart ontwikkelden een kogelvormig, kunststof miniatuur robot met een diameter van 25 micrometer, die akoestisch naar voren wordt voortgestuwd - een snel vliegende kogel, in de ware zin van het woord. Minder dan de diameter van een mensenhaar in grootte, nooit eerder heeft zo'n aangedreven microrobot deze snelheid bereikt. Het slimme ontwerp is zo efficiënt dat het zelfs beter presteert dan het zwemvermogen van natuurlijke micro-organismen.
De wetenschappers ontwierpen de 3D-geprinte polymeer microrobot met een bolvormige holte en een klein buisvormig mondstuk naar de bodem (zie figuur 1). Omgeven door vloeistof zoals water, de holte vangt een bolvormige luchtbel op. Zodra de robot wordt blootgesteld aan akoestische golven van ongeveer 330 kHz, de luchtbel pulseert, de vloeistof in de buis naar de achterkant van de microrobot duwen. De beweging van de vloeistof stuwt de kogel vervolgens vrij krachtig naar voren met maximaal 90 lichaamslengtes per seconde. Dat is een stuwkracht die twee tot drie orden van grootte sterker is dan die van natuurlijke micro-organismen zoals algen of bacteriën. Beide behoren tot de meest efficiënte microzwemmers in de natuur, geoptimaliseerd door evolutie.
Het inzetten van ultrasone golven om microrobots aan te sturen is geen nieuwe benadering. Echter, eerdere robots met zwemcapaciteiten zijn relatief traag gebleken, moeilijk te controleren in de buurt van oppervlakken, en hebben een relatief korte bedrijfstijd van slechts enkele minuten gehad. Al deze factoren zijn obstakels voor het gebruik ervan in medische toepassingen voor gerichte medicijnafgifte, ontgifting, of niet-invasieve operaties. De wetenschappers van de afdeling Fysieke Intelligentie van de MPI-IS, Dr. Amirreza Aghakhani, Oncay Yasa, Paul Wrede, en Dr. Metin Sitti, wie is de afdelingsdirecteur, waren in staat om de stuurcapaciteiten van hun robot te verfijnen en de bedrijfstijd te verlengen tot enkele uren. Hun publicatie "Akoestisch aangedreven, op het oppervlak glijdende mobiele microrobots" werd gepubliceerd in de Proceedings van de National Academy of Sciences in februari 2020.
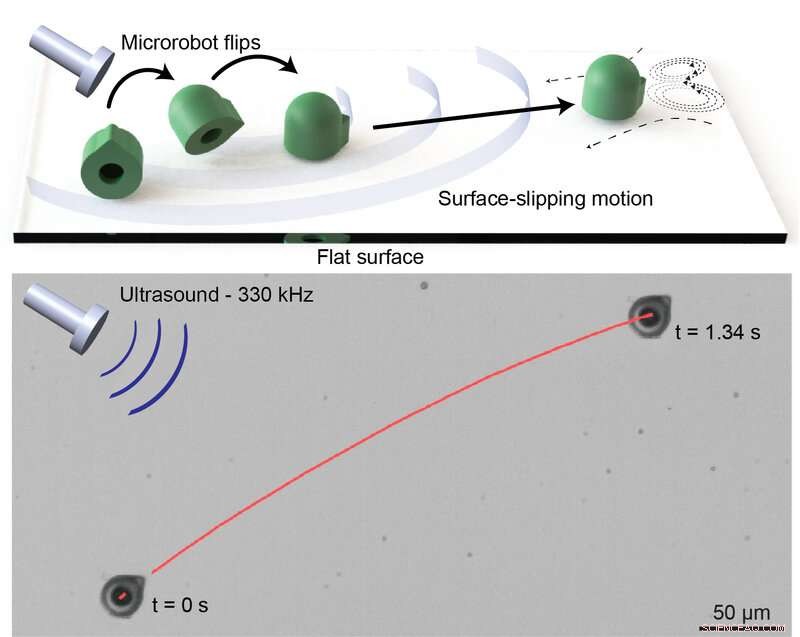
Figuur 2. Schema's van een oppervlakte-slippende microrobot onder ultrasone stroomvoorziening (boven); Time-lapse-beeld van de bewegende microbot op een substraat bij 330 kHz akoestische excitatie (onder). Credit:Max Planck Instituut voor Intelligente Systemen Stuttgart
Naast het ontwerpen van de robot met een binnenholte die een bolvormige luchtbel met een kleine opening opsluit, ze voegden een kleine vin toe aan het cilindrische lichaamsoppervlak van de microrobot (zie figuur 2), die de voortstuwingsrichting vertekent. Ze bedekten ook de bovenkant van de polymeerkogel met een zachte magnetische nanofilmlaag. Met behulp van omringende externe magnetische velden, ze waren dan in staat om de richting van de kogel naar links of rechts te veranderen, ook omhoog of omlaag.
In verschillende experimenten, de onderzoekers testten hoe in staat is hun robot te bewegen op verschillende oppervlakken in een microkanaal dat lijkt op een bloedvat. Ze stelden de robot bloot aan akoestische golven en een magnetisch veld en slaagden erin om hem te navigeren in deze beperkte 3D-ruimte. Ze toonden ook aan dat het vangen van lading automatisch gebeurt terwijl de microrobot beweegt. Terwijl de vloeistof uit de holte van de robot wordt geduwd bij blootstelling aan ultrasone golven, naar de bodem toe wordt een cirkelvormig microstroompatroon gegenereerd (zie figuur 2). Deze stroom zorgt ervoor dat omringende medicijndeeltjes naar de robot worden geleid. Daar, de deeltjes worden verzameld en met de beweging van de robot weggevoerd. Dankzij dit, de robot zou op een dag kunnen worden toegepast om kankermedicijndeeltjes in de bloedbaan te verzamelen en het medicijn specifiek naar een carcinoom te transporteren, lossen van de lading op korte afstand voor maximale impact.
Dr. Amirreza Aghakhani, een postdoctoraal onderzoeker bij de afdeling Fysieke Intelligentie en de co-hoofdauteur van de publicatie, vat de bijzondere kenmerken van de microrobot samen:"We kunnen onze microrobots zeer efficiënt aansturen, en ze zijn ook nog eens erg snel. Echografie is onschadelijk voor het lichaam en kan diep in het lichaam doordringen. We kunnen deze robots gecontroleerd verplaatsen op zowel vlakke als gebogen oppervlakken en we kunnen verschillende ladingen, zoals medicijnen. Dit is indrukwekkend."
Een ander voordeel is echografie. Binnen in het lichaam, beeldvorming is een grote uitdaging wanneer de robot slechts enkele micrometers groot is. "Echter, de ingesloten luchtbel kan als contrastmiddel werken, de robot en zijn locatie beter zichtbaar maken, "Dr. Aghakhani voegt eraan toe.
"Onze visie is om in de nabije toekomst dergelijke akoestisch aangedreven en magnetisch gestuurde microrobots in het menselijk lichaam in te zetten voor verschillende niet-invasieve medische toepassingen, " Dr. Metin Sitti besluit.
 De handtekening van het Antropoceen op de berg Elbrus, Kaukasus
De handtekening van het Antropoceen op de berg Elbrus, Kaukasus- Zal de pandemie-ervaring ons helpen de klimaatverandering aan te pakken?
- NASA meet regenval van overblijfselen van tropische cycloon Owens aan de kust van Queensland
- Veg nudge:een extra vegetarische optie vermindert de vleesconsumptie zonder de verkoop van voedsel te deuken
- Australië geeft bedrijven de schuld van trage reactie op olieramp in Solomons
Hoofdlijnen
- De functie van Peyers-patches
- Uit een grootschalig onderzoek blijkt dat veel geplande wegen in de tropen niet gebouwd mogen worden
- Roofzuchtige bacteriën - de zoektocht naar een nieuwe klasse antibiotica
- Drie voorbeelden van protisten met wetenschappelijke namen
- Afwijkende hyfen veroorzaakt door immuunreacties van de gastheer op plantpathogene schimmel
- Hoe Flow Cytometry-resultaten te begrijpen
- Hongerige berencrisis grijpt in het verre oosten van Rusland
- Wetenschappers ontwerpen nieuwe moleculen die resistentie tegen conventionele antibiotica kunnen overwinnen
- Hoe kan een babyrobotzeehond een medisch hulpmiddel zijn?
- Robots in het veld:boerderijen die autonome technologie omarmen

- Amerikaanse gezondheidsdienst lijdt cyberaanval tijdens COVID-19-reactie

- Het spelen van videogames kan onderzoekers helpen bij het vinden van een gepersonaliseerde medische behandeling voor sepsis
- Nationale noodwaarschuwingen die mogelijk kwetsbaar zijn voor aanvallen

- New Jersey eist $ 640 miljoen van Uber voor het verkeerd classificeren van werknemers


 Ultrasnelle snapshots van ontspannende elektronen in vaste stoffen
Ultrasnelle snapshots van ontspannende elektronen in vaste stoffen- The Common Snakes of Oklahoma
- Nieuwe ultraresistente en zelfherstellende betonmaterialen
- Toenemend volume van onderzoek naar wapenbeleid creëert basis voor beleidsbeslissingen
- IBM lab-on-a-chip doorbraak is bedoeld om artsen te helpen kanker op te sporen
- Is algen een decomposer, een aaseter of een producent?
- Vage superplaneet ontdekt door radiotelescoop
- Machines zullen in 2025 meer taken doen dan mensen:WEF
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
