Wetenschap
Hoe robots te ontwerpen en te besturen met rekbare, flexibele lichamen
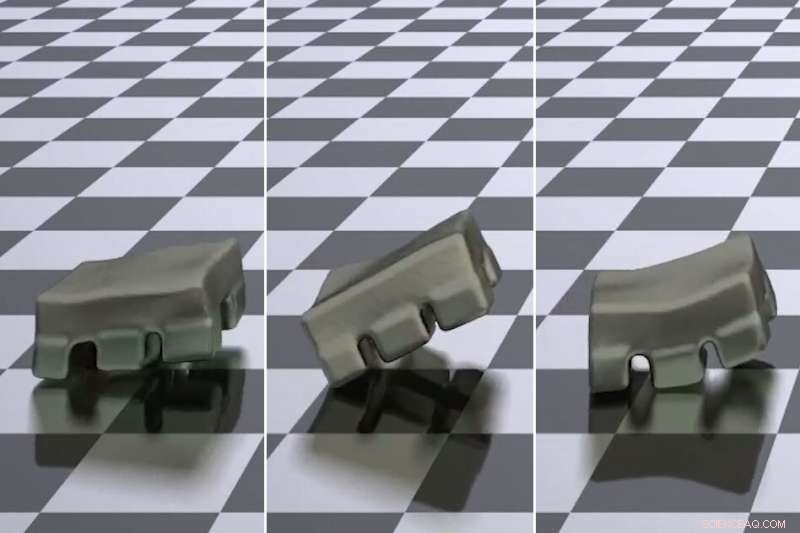
Een door MIT uitgevonden model optimaliseert efficiënt en gelijktijdig de besturing en het ontwerp van zachte robots voor doeltaken, die van oudsher een monumentale onderneming in de berekening is geweest. Het model, bijvoorbeeld, was aanzienlijk sneller en nauwkeuriger dan state-of-the-art methoden om te simuleren hoe quadrupedale robots (afgebeeld) zouden moeten bewegen om doelbestemmingen te bereiken. Krediet:Andrew Spielberg, Daniela Rus, Wojciech Matusik, Allan Zhao, Tao Du, en Yuanming Hu
MIT-onderzoekers hebben een manier bedacht om de besturing en het ontwerp van zachte robots voor doeltaken efficiënt te optimaliseren, die van oudsher een monumentale onderneming in de berekening is geweest.
Zachte robots hebben veerkrachtige, flexibel, rekbare lichamen die op een gegeven moment in wezen een oneindig aantal manieren kunnen bewegen. rekenkundig, dit vertegenwoordigt een zeer complexe "staatsvertegenwoordiging, " die beschrijft hoe elk onderdeel van de robot beweegt. Staatsrepresentaties voor zachte robots kunnen potentieel miljoenen dimensies hebben, waardoor het moeilijk is om de optimale manier te berekenen om een robot complexe taken te laten voltooien.
Op de conferentie over neurale informatieverwerkingssystemen volgende maand, zullen de MIT-onderzoekers een model presenteren dat een compacte, of "laag-dimensionaal, " toch gedetailleerde staatsvertegenwoordiging, gebaseerd op de onderliggende fysica van de robot en zijn omgeving, onder andere factoren. Dit helpt het model bij het iteratief co-optimaliseren van bewegingscontrole en materiaalontwerpparameters voor specifieke taken.
"Zachte robots zijn oneindig-dimensionale wezens die op een bepaald moment op een miljard verschillende manieren buigen, " zegt eerste auteur Andrew Spielberg, een afgestudeerde student in het Computer Science and Artificial Intelligence Laboratory (CSAIL). "Maar, in waarheid, er zijn natuurlijke manieren waarop zachte voorwerpen kunnen buigen. We vinden dat de natuurlijke toestanden van zachte robots zeer compact kunnen worden beschreven in een laagdimensionale beschrijving. We optimaliseren de besturing en het ontwerp van zachte robots door een goede beschrijving van de waarschijnlijke toestanden te leren."
Bij simulaties, het model stelde 2D- en 3D-zachte robots in staat om taken, zoals het verplaatsen van bepaalde afstanden of het bereiken van een doelplek, sneller en nauwkeuriger uit te voeren dan de huidige state-of-the-art methoden. De onderzoekers zijn vervolgens van plan het model in echte zachte robots te implementeren.
Bij Spielberg op het papier zijn CSAIL-afgestudeerde studenten Allan Zhao, Tao Du, en Yuanming Hu; Daniela Rus, directeur van CSAIL en de Andrew en Erna Viterbi hoogleraar elektrotechniek en computerwetenschappen; en Wojciech Matusik, een universitair hoofddocent aan het MIT in elektrotechniek en informatica en hoofd van de Computational Fabrication Group.
"Leren-in-the-loop"
Zachte robotica is een relatief nieuw onderzoeksgebied, maar het is veelbelovend voor geavanceerde robotica. Bijvoorbeeld, flexibele lichamen zouden een veiligere interactie met mensen kunnen bieden, betere objectmanipulatie, en meer wendbaarheid, onder andere voordelen.
De besturing van robots in simulaties berust op een "waarnemer, " een programma dat variabelen berekent die zien hoe de zachte robot beweegt om een taak te voltooien. In eerder werk, de onderzoekers ontbonden de zachte robot in met de hand ontworpen clusters van gesimuleerde deeltjes. Deeltjes bevatten belangrijke informatie die de mogelijke bewegingen van de robot helpen beperken. Als een robot op een bepaalde manier probeert te buigen, bijvoorbeeld, actuatoren kunnen die beweging voldoende weerstaan om te worden genegeerd. Maar, voor zulke complexe robots, handmatig kiezen welke clusters tijdens simulaties moeten worden gevolgd, kan lastig zijn.
Voortbouwend op dat werk, ontwierpen de onderzoekers een "learning-in-the-loop optimalisatie"-methode, waarbij alle geoptimaliseerde parameters worden geleerd tijdens een enkele feedbacklus over vele simulaties. En, tegelijkertijd met leeroptimalisatie - of "in the loop" - leert de methode ook de toestandsrepresentatie.
Het model maakt gebruik van een techniek die een materiaalpuntmethode (MPM) wordt genoemd, die het gedrag van deeltjes van continuümmaterialen simuleert, zoals schuim en vloeistoffen, omgeven door een achtergrondraster. Daarbij, het vangt de deeltjes van de robot en zijn waarneembare omgeving in pixels of 3D-pixels, bekend als voxels, zonder dat er extra rekenwerk nodig is.
In een leerfase deze ruwe deeltjesrasterinformatie wordt ingevoerd in een machine-learningcomponent die leert een afbeelding in te voeren, comprimeren tot een laagdimensionale weergave, en decomprimeer de weergave terug in het invoerbeeld. Als deze "autoencoder" voldoende detail behoudt tijdens het comprimeren van de invoerafbeelding, het kan nauwkeurig het invoerbeeld van de compressie recreëren.
In het werk van de onderzoekers de aangeleerde gecomprimeerde representaties van de autoencoder dienen als de laagdimensionale toestandsrepresentatie van de robot. In een optimalisatiefase die gecomprimeerde weergave loopt terug in de controller, die een berekende activering uitvoert voor hoe elk deeltje van de robot moet bewegen in de volgende MPM-gesimuleerde stap.
Tegelijkertijd, de controller gebruikt die informatie om de optimale stijfheid voor elk deeltje aan te passen om de gewenste beweging te bereiken. In de toekomst, dat materiaalinformatie nuttig kan zijn voor het 3D-printen van zachte robots, waarbij elke deeltjesvlek kan worden afgedrukt met een iets andere stijfheid. "Hierdoor kunnen robotontwerpen worden gemaakt die zijn afgestemd op de robotbewegingen die relevant zijn voor specifieke taken, " zegt Spielberg. "Door deze parameters samen te leren, je houdt alles zoveel mogelijk gesynchroniseerd om dat ontwerpproces gemakkelijker te maken."
Snellere optimalisatie
Alle optimalisatie-informatie is, beurtelings, teruggevoerd naar het begin van de lus om de autoencoder te trainen. Over vele simulaties, de controller leert de optimale beweging en materiaalontwerp, terwijl de autoencoder de steeds meer gedetailleerde staatsrepresentatie leert. "De sleutel is dat we willen dat die laagdimensionale toestand heel beschrijvend is, ', zegt Spielberg.
Nadat de robot gedurende een bepaalde periode in zijn gesimuleerde eindtoestand is gekomen, bijvoorbeeld, zo dicht mogelijk bij de doelbestemming - het werkt een "verliesfunctie" bij. Dat is een cruciaal onderdeel van machine learning, die probeert een fout te minimaliseren. In dit geval, het minimaliseert, zeggen, hoe ver de robot stopte van het doel. Die verliesfunctie vloeit terug naar de controller, die het foutsignaal gebruikt om alle geoptimaliseerde parameters af te stemmen om de taak zo goed mogelijk te voltooien.
Als de onderzoekers probeerden alle onbewerkte deeltjes van de simulatie rechtstreeks in de controller te voeren, zonder de compressiestap, "loop- en optimalisatietijd zou exploderen, "zegt Spielberg. Met behulp van de gecomprimeerde weergave, the researchers were able to decrease the running time for each optimization iteration from several minutes down to about 10 seconds.
The researchers validated their model on simulations of various 2-D and 3-D biped and quadruped robots. They researchers also found that, while robots using traditional methods can take up to 30, 000 simulations to optimize these parameters, robots trained on their model took only about 400 simulations.
Deploying the model into real soft robots means tackling issues with real-world noise and uncertainty that may decrease the model's efficiency and accuracy. Maar, in the future, the researchers hope to design a full pipeline, from simulation to fabrication, for soft robots.
 Lithium-ionbatterijen krijgen meer efficiëntie dankzij silicium, germanium, koolstof nanowalls
Lithium-ionbatterijen krijgen meer efficiëntie dankzij silicium, germanium, koolstof nanowalls- Hoe een geïsoleerde opbrengst te berekenen
- Thermische eigenschappen van papier
- Hoe technologieën voor schoon water een boost kunnen krijgen van röntgensynchrotrons
- Met ultrakoude chemie, onderzoekers krijgen een eerste blik op wat er precies gebeurt tijdens een chemische reactie
- Kunnen oceanen het tij van de klimaatcrisis keren?
- Hoe om te gaan met extreme hittedagen zonder de rekeningen van de airconditioning te verhogen
- Geologen graven in de mysterieuze kloof van Grand Canyons in de tijd
- Het weer moet ondanks klimaatverandering voorspelbaar blijven
- Typen chlorofyl aanwezig in Algae
Hoofdlijnen
- Wetenschappers hebben het allereerste roestpathogeen gen geïsoleerd dat tarweplanten detecteren om resistentie in te schakelen
- Wat is een CFU in de microbiologie?
- Science Fair Project Ideas: Equine
- De isovormen van het HP1-eiwit reguleren de organisatie en structuur van heterochromatine
- Verschillen tussen Protista en Monera
- Interessante feiten over plantencellen
- Waar wordt de kern in de cel gevonden en waarom?
- Bacteriën: definitie, soorten en voorbeelden
- Onderzoekers identificeren genen die zoogdieren van andere dieren onderscheiden
- Quebec op zijn hoede voor bitcoin goudkoorts

- Facebook-berichtenapps krijgen een uniform betalingssysteem

- NBC om prijs te geven, details over nieuwe Peacock-streamingservice

- Facebook betaalt geen schadevergoeding voor Cambridge Analytica-zaak

- Nieuwe aanpak optimaliseert het gebruik van toekomstige golfgeneratoren tijdens rampen

 Target winkels om mobiele betalingen te accepteren, inclusief Apple Pay, Samsung Pay en Google Pay
Target winkels om mobiele betalingen te accepteren, inclusief Apple Pay, Samsung Pay en Google Pay- NASA wil water oogsten op maan en Mars, en studenten denken dat ze kunnen helpen
- Welke soorten genen hebben plasmiden?
- Hoe molaire oplosbaarheid te berekenen van KSP?
- Honderden Chinese burgers vertelden me wat ze dachten over het controversiële sociale kredietsysteem
- Einsteins zwaartekrachttheorie houdt stand - zelfs in extreme omstandigheden
- Zoet water dat de noordelijke Stille Oceaan binnenstroomt, speelt een sleutelrol in het klimaat in Noord-Amerika
- Napels schrijlings op een rommelende megavulkaan
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | German | Dutch | Danish | Norway | Swedish |

-
Wetenschap © https://nl.scienceaq.com
