Wetenschap
Meerdere spiraalvormige magnetische zachte robots brengen ons dichter bij het begrijpen van collectief gedrag
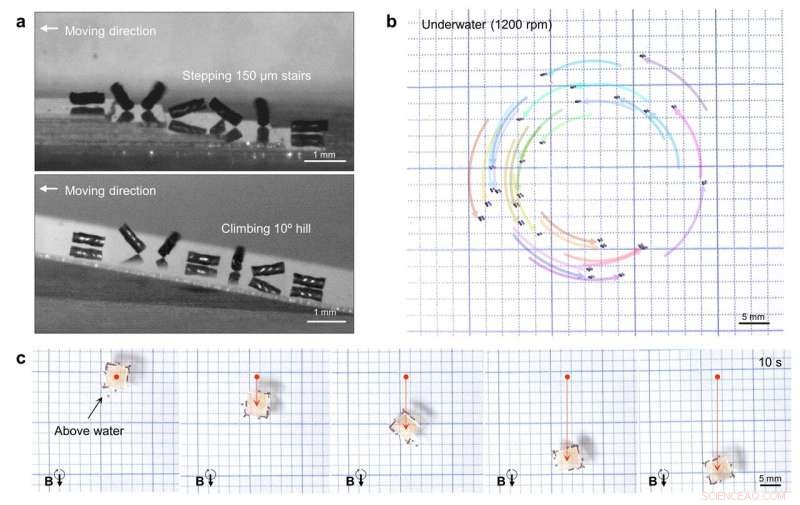
Hiërarchische magnetomotiliteit aangedreven door roterende en draaiende bewegingen van spiraalvormige magnetische zachte robots maakt (a) klimmen over obstakels mogelijk, (b) onderwaterzwemmen van meerdere zachte robots, en (c) collectief vervoer van vracht via een enkele roterende as van permanente magneten. Krediet:Inha University
Magnetische zachte robots zijn een veelbelovende optie voor contactloze besturing in besloten omgevingen via externe magnetische stimuli. Magneto-geïnduceerde bewegingen, d.w.z., magnetomotiliteit, worden aangedreven door lokale vervorming van een robot waarbij deeltjesuitlijningen en afwisselende polaire verdelingen in het lichaam worden geprogrammeerd. Pogingen om magnetische anisotropie in de zachte robots te programmeren zijn uitgevoerd door middel van direct laserprinten (DLP), stereolithografie (SLA) en fused filament fabricage (FDM) gecombineerd met multi-axiale manipulatie van elektromagneten.
Nutsvoorzieningen, onderzoekers hebben eenvoudige voorbereidings- en bedieningsmethoden van magnetische zachte robots aangetoond zonder elektromagnetische regulering. Ze construeerden een driedimensionale spiraalvormige zachte robot door een tweedimensionale polymeercomposietfilm te draaien. Thermoplastische polyurethaan-magnetiet-nanocomposieten maakten het mogelijk om de films super te draaien vanwege de hoge rek; het gebruik van thermoplastische materialen maakte het ook mogelijk om de gedraaide architectuur thermisch te fixeren. Het dichte spiraalvormige lichaam van magnetische zachte robots maakte hiërarchische magnetomotiliteit mogelijk, inclusief rotaties met de klok mee en omwentelingen tegen de klok in als gevolg van twee permanente magneten met een enkele rotatie-as die onder de substraten met de klok mee roteert.
Bij magnetische manipulatie van meerdere zachte robots, besturing van de individuele robot blijft een ingewikkelde manoeuvre, aangezien het respectieve traject van elke robot gelijktijdig wordt gecoördineerd langs verschillende paden. Batterijloze werking van deze meervoudige magnetische zachte robots werd uitgevoerd door variaties in frequenties van de in het vlak roterende magneten, aangezien zachte robots met verschillende aspectverhoudingen werden geactiveerd met andere rotatiemodi - roterend, draaiend, en tuimelen, zelfs bij identieke rotatiesnelheid. Naast orbitaal manoeuvreren van radii, snelheden, en paden van de meerdere zachte robots, behendige voortbeweging tot 60 lichaamslengte s-1 en hiërarchische magnetomotiliteit hielpen de zachte robots bij het beklimmen van obstakels zoals trappen, heuvels en gerimpelde oppervlakken onder een voortdurend roterende magnetische bron en zonder de multidirectionele regulering van magnetische velden.
De onderzoekers toonden ook samenwerking aan tussen meerdere magnetische zachte robots, geïnspireerd door de collectieve kwaliteit van vrachtvervoer in mierenkolonies. Collectief gedrag is een veel voorkomende observatie in de natuur met voorbeelden gevonden in celmigratie, mierenkolonies, en scholen vissen, om er een paar te noemen. Echter, het is moeilijk om dit ontwerp te bereiken in collectieve robots omdat de dynamiek van zowel individuele als collectieve robotbewegingen moet worden geoptimaliseerd vanuit zowel computationele als experimentele analyses. Deze vereisten worden in dit onderzoek overbodig, als capillaire krachten werken om de roterende en draaiende zachte robots rond de lading te bevestigen. De verplaatsing van de magneten onder de robots resulteert in een gemakkelijker transport van zware voorwerpen, vergelijkbaar met het werkgedrag van mieren.
Deze nieuwe technieken van on-demand orbitaal manoeuvreren via hiërarchische magnetomotiliteit kunnen worden uitgebreid voor biomedische toepassingen waar geminiaturiseerde magnetische zwemmers mogelijk medicijnen kunnen afleveren in ruimtes met complexe configuraties.
 Zelfaangedreven papierchips kunnen helpen om vroegtijdig alarm te slaan voor bosbranden
Zelfaangedreven papierchips kunnen helpen om vroegtijdig alarm te slaan voor bosbranden- Hoe te veel koeling voor een koeltoren te berekenen
- Tips voor het onthouden van sterke zuren en basen
Als je de namen van sterke zuren en basen voor een chemie-examen moet onthouden, raak dan niet in paniek. Als eenvoudige herhaling niet werkt, probeer dan lijsten te schrijven of gebruik een mnemoni
- Waarom moet een buret en pipet worden afgespoeld met de juiste oplossing vóór een titratie?
- Nieuwe composietmaterialen verlengen de levensduur van reserveonderdelen voor apparatuur en voertuigen
- Kilometerlange slick achtergelaten door brandende olietanker bij Sri Lanka
- China blaast dam op in oostelijke provincie om overstromingsrisico te verminderen
- Aswolken van Antarctische vulkanen kunnen het luchtverkeer op het zuidelijk halfrond verstoren
- Stikte, gewurgd en verdronken. Hoe ballonnen en plastic zakken zeedieren doden
- Wetenschappers testen een microalgentechnologie voor afvalwaterzuivering
Hoofdlijnen
- 10 bizarre behandelingen die artsen vroeger dachten dat ze legitiem waren
- Planten worden toleranter als ze in symbiose met schimmels leven
- DNA-onderzoekers roepen botverzamelaars op om toegang tot botten te delen
- Theory of Evolution: Definition, Charles Darwin, Evidence & Voorbeelden
- Hoe synesthesie werkt
- Genmutatie: definitie, oorzaken, typen, voorbeelden
- Spanje meldt geval van gekkekoeienziekte
- Een biologische oplossing voor het afvangen en recyclen van koolstof?
- Het verschil tussen kwalitatieve en kwantitatieve eigenschappen in de genetica
- Kernkoppen? Deze robot kan ze vinden
- Kirigami inspireert nieuwe methode voor draagbare sensoren

- De oprichter van internet wil nu het internet repareren, maar zijn voorstel mist het doel

- Een nieuwe techniek voor het synthetiseren van bewegingswazige beelden

- Samsung zoekt alternatieven voor Japanse leveranciers in handelsrij


 Kunststofproducten kunnen gemakkelijk elektronisch worden met de eerste vormbare circuits van volledig koolstof
Kunststofproducten kunnen gemakkelijk elektronisch worden met de eerste vormbare circuits van volledig koolstof- Dit is waarom we niet alleen op steden kunnen vertrouwen om klimaatverandering aan te pakken
- Wiebelen en wiebelen:studie legt uit hoe organismen evolueren om bij verschillende temperaturen te leven
- Zonne-elektrische voortstuwing zorgt ervoor dat NASA's Psyche-ruimtevaartuig gaat
- Economen waarschuwen dat oplossingen voor palmolie onbedoelde gevolgen kunnen hebben
- Het mogelijke gebruik van deze 'tweede huid' is behoorlijk verbazingwekkend
- Plastic afval in zee drijft vooral langs de kust
- Een nieuwe groep vindt Amazon te groot om te regeren en wil het verzet leiden
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
