Wetenschap
Een verenigende aanpak voor het beheersen van vliegende robotinsecten
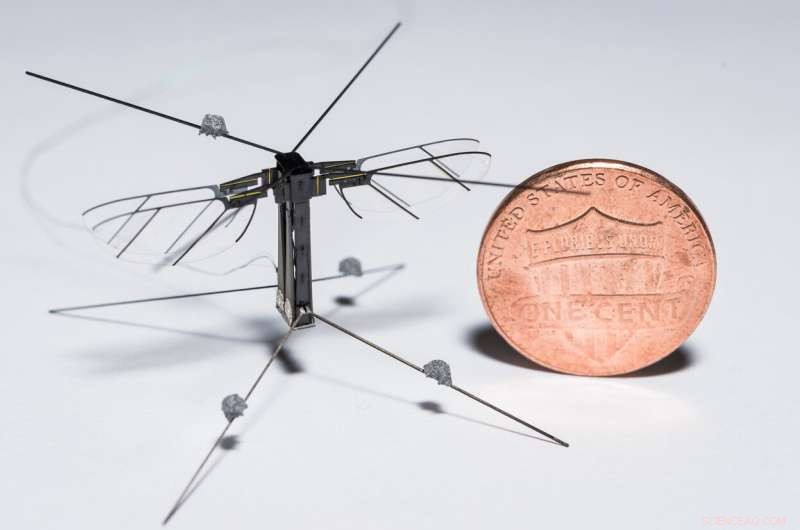
Vliegend robotinsect Bee+. Krediet:Xiufeng Yang.
Een van de belangrijkste problemen waarmee onderzoekers op het gebied van microrobotica worden geconfronteerd, is het ontwerpen en implementeren van betrouwbare controllers voor micro-luchtvoertuigen op insectenschaal (FWMAV's), dat zijn kleine vliegende robots die typisch zijn geïnspireerd door insecten. In feite, hoewel deze robots ter grootte van een insect tal van nuttige toepassingen kunnen hebben, bijvoorbeeld, het assisteren van mensen bij zoek- en reddingsmissies of in de landbouw, het ontwikkelen van controllers die passen bij hun grootte en structuur is tot nu toe moeilijk gebleken.
Onderzoekers van de University of Southern California (USC) hebben onlangs een onderzoek uitgevoerd naar de uitdagingen bij het ontwerpen van deze controllers. In hun krant voorgepubliceerd op arXiv, ze introduceren een nieuwe verenigende benadering die de ontwikkeling van effectievere technieken voor de beheersing van FWMAV's zou kunnen helpen ontwikkelen. De onderzoekers achter het onderzoek maken deel uit van het autonome microrobotic systems Laboratory (AMSL), die de erfgenaam is van een onderzoekslijn die meer dan 20 jaar geleden begon bij UC Berkeley, ging vanaf 2005 verder op Harvard en kwam in 2013 aan bij het USC.
"We, als een team, deel dezelfde droom van velen in de microrobotica-gemeenschap; de visie om volledig autonome kunstmatige insecten te creëren die intelligent kunnen opereren in zeer ongestructureerde omgevingen, " Prof. Nestor O Perez-Arancibia, de hoofdonderzoeker (PI) voor het onderzoek, vertelde TechXplore. "Persoonlijk, Ik ben geïnspireerd door de natuur. Onze machines, inclusief Bee+, wat een geweldig stukje techniek is, nog steeds achter bij echte insecten in termen van aerobatische mogelijkheden, bediening, voelen, rekenkracht, enzovoort."
Perez-Arancibia doet al enkele jaren onderzoek naar microrobotsystemen. Hij is van mening dat alle door mensen gemaakte machines uiteindelijk kunnen worden verbeterd als ze zich laten inspireren door de natuur, bijvoorbeeld door het gedrag of de kenmerken van bijen te observeren en na te bootsen, vlinders en muggen.

Vliegend robotinsect Bee+. Krediet:Xiufeng Yang.
In hun studie hebben Perez-Arancibia en zijn collega's onderzochten de bestrijding van vliegende insecten met behulp van twee verschillende experimentele platforms:een Bee-achtige tweevleugelige robot en de viervleugelige Bee+ micorobot ontwikkeld aan het USC. In een reeks experimenten, ze konden aantonen dat een techniek die quaternion-coördinaten gebruikt voor houdingscontrole, die is ontworpen om onbemande voertuigen met vier rotoren te besturen, kan worden toegepast om beide robotachtige insecten aan te drijven.
"We waren in staat om iets te vereenvoudigen dat veel onderzoekers als erg moeilijk beschouwen, "Zei Perez-Arancibia. "Ik geloof graag dat dit een geval is waarin intelligente modellering (d.w.z. door het probleem vanuit een nieuw en 'beter' perspectief te bekijken), we kunnen schijnbaar hardnekkige complexe fenomenen begrijpen en analyseren die ons kunnen helpen betere robotontwerpen te ontwikkelen, vooral in termen van aerodynamische krachtopwekking, configuratie en bediening van het mechanisme."
De resultaten van de tests uitgevoerd door Perez-Arancibia en zijn collega's suggereren dat de generieke strategie die ze hebben geïntroduceerd, kan worden gebruikt om verschillende soorten kunstmatige insecten te bestrijden die enkele gemeenschappelijke kenmerken delen. Hoewel ze specifiek de effectiviteit van deze strategie hebben aangetoond op een tweevleugelige robot en de viervleugelige Bee+ robot, het zou mogelijk ook kunnen worden toegepast op andere insectachtige microrobots.
Perez-Arancibia is van mening dat door het volgen van een controlebenadering op hoog niveau die de problemen van bediening en vluchtcontrole loskoppelt, het is mogelijk om algemene algoritmen te identificeren die op meerdere platforms kunnen worden gebruikt. Bijvoorbeeld, deze benadering zou onderzoekers in staat kunnen stellen nieuwe algoritmen te ontwikkelen voor aerobatische vluchten met behulp van quadrotoren van 19 gram die vervolgens kunnen worden geïmplementeerd op een 95 milligram, viervleugelige Bee+.
"Dit is relevant omdat naarmate robotvliegers kleiner worden, ze worden ook moeilijker te fabriceren, moeilijker te hanteren en duurder, "Zei Perez-Arancibia. "Daarom, zoals blijkt uit onze krant, het feit dat dezelfde benadering kan worden gebruikt om controllers te synthetiseren voor platforms met gewichtsverschillen van wel twee ordes van grootte, is significant en relevant vanuit zowel onderzoeks- als praktische perspectieven."
In de toekomst, de aanpak die door dit team van onderzoekers van het USC is geïntroduceerd, zou kunnen bijdragen aan het ontwerp en de implementatie van nieuwe controllers voor insectachtige microrobots. In aanvulling, de komende maanden, Perez-Arancibia en zijn collega's zullen werken aan een ander project dat gericht is op het creëren van het allereerste volledig autonome subgram vliegende kunstmatige insect.
"Momenteel, de belangrijkste beperking die microrobotici heeft verhinderd om autonome vluchten op de subgramschaal te bereiken, is de extreem lage energiedichtheid van elektrische batterijen, "Zei Perez-Arancibia. "We zullen autonomie bereiken door kunstmatige spieren te gebruiken die worden aangedreven door katalytische reacties."
© 2019 Wetenschap X Netwerk
 Nieuw materiaal van legering van reactorvoering biedt sterkte, weerstand
Nieuw materiaal van legering van reactorvoering biedt sterkte, weerstand- Enzymen versus zenuwgassen - tegengif ontwerpen voor chemische wapens
- Onderzoekers synthetiseren biobased methylcyclopentadieen met 3-methylcyclopent-2-enon
- Nieuwe behandeling ontsluit potentieel voor het bakken van frambozen
- Een nieuw systeem om een verbinding te bouwen die cruciaal is voor de ontwikkeling van geneesmiddelen
- Naarmate het klimaat verandert, architecten en ingenieurs moeten gebouwen anders ontwerpen
- Sneeuwvalpatronen kunnen aanwijzingen geven voor de Groenlandse ijskap
- Voorspelling van het lot van olielozingen in Arctisch zee-ijs
- NASA ziet krachtige stormen met oprukkende moesson in Golf van Bengalen
- Welke melk is het beste voor het milieu? We vergeleken zuivel, noot, soja, hennep- en graanmelk
Hoofdlijnen
- Chromatid: wat is het?
- Het Bohr-model:snel vervangen maar nooit vergeten
- Wat maakt DNA-vingerafdrukken uniek?
- 7 soorten bindweefsel
- Stadia van de Menselijke Reproductie
- Hoe beïnvloedt het hebben van twee van elk soort chromosoom de genen die een persoon heeft?
- Het verschil tussen genomisch DNA en plasmide-DNA
- Dit is waarom Fortnite zo verslavend is
- Voorbeelden van sensorische aanpassing
- Waarom Twitter schattig is, hartvormige knop is niet zo ongevaarlijk

- Uit nieuw onderzoek blijkt dat tweederde van de tweedehands geheugenkaarten persoonlijke gegevens van vorige eigenaren bevat

- EU opent subsidies voor push elektrische batterij

- WhatsApp klaagt Israëlisch bedrijf NSO aan wegens cyberspionage

- Adidas schakelt Duits, Amerikaanse slimme fabrieken naar Azië


 Vrouwelijke ruiters willen betere bh-ondersteuning
Vrouwelijke ruiters willen betere bh-ondersteuning- Voormalige Audi-baas sluit zich aan bij ex-VW-chef in dok over dieselgate
- Jupiters Grote Rode Vlek voedt zich met kleinere stormen
- Wat is de baan van Saturnus in Aardse dagen?
- Handgeschreven Einstein-biljet geveild in Jeruzalem
- Wat is een hoge latitude?
- Opwarmend klimaat heeft invloed op dode zones in Chesapeake Bay
- Wat is de identiteitseigenschap van vermenigvuldiging?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
