Wetenschap
Onderzoekers bouwen microscopische biohybride robots aangedreven door spieren, zenuwen
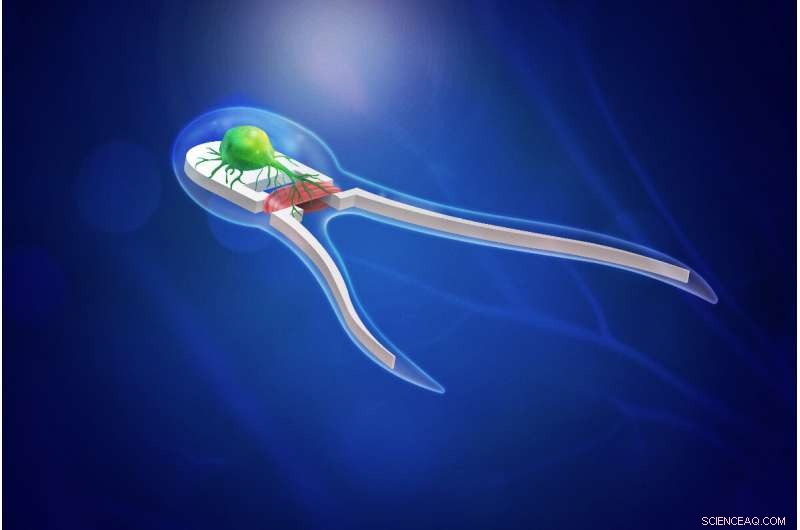
Artistieke weergave van een nieuwe generatie biobots -- zachte robotachtige apparaten aangedreven door skeletspierweefsel gestimuleerd door ingebouwde motorneuronen. Krediet:Michael Vincent
Onderzoekers hebben zachte robotachtige apparaten ontwikkeld die worden aangedreven door neuromusculair weefsel dat wordt geactiveerd wanneer ze worden gestimuleerd door licht, waardoor werktuigbouwkunde een stap dichter bij de ontwikkeling van autonome biobots komt.
In 2014, onderzoeksteams onder leiding van professor mechanica en techniek Taher Saif en professor bio-engineering Rashid Bashir aan de Universiteit van Illinois werkten samen om de eerste zelfrijdende biohybride zwemmende en lopende biobots te ontwikkelen die werden aangedreven door het verslaan van hartspiercellen afkomstig van ratten.
"Onze eerste zwemmerstudie toonde met succes aan dat de bots, gemodelleerd naar zaadcellen, kon in feite zwemmen, Saif zei. "Die generatie enkelstaartbots gebruikte hartweefsel dat vanzelf klopt, maar ze konden de omgeving niet voelen of beslissingen nemen."
In een nieuwe studie gepubliceerd in de Proceedings van de National Academy of Sciences en geleid door Saif, de onderzoekers demonstreren een nieuwe generatie tweezijdige bots die worden aangedreven door skeletspierweefsel dat wordt gestimuleerd door ingebouwde motorneuronen. De neuronen hebben optogenetische eigenschappen:bij blootstelling aan licht, de neuronen zullen vuren om de spieren te activeren.
"We hebben een optogenetische neuroncelcultuur toegepast, afgeleid van muizenstamcellen, grenzend aan het spierweefsel, Saif zei. "De neuronen rukten op naar de spier en vormden neuromusculaire verbindingen, en de zwemmer verzamelde op zijn eigen."
Na te hebben bevestigd dat het neuromusculaire weefsel compatibel was met hun synthetische biobotskeletten, het team werkte om de vaardigheden van de zwemmer te optimaliseren.
Het onderzoeksteam omvat, Van links, professor Taher Saif, afgestudeerde student Onur Aydin, afgestudeerde student Xiastian Zhang, professor Mattia Gazzola, afgestudeerde student Gelson J. Pagan-Diaz, zittend, en professor en decaan van het Grainger College of Engineering, Rashid Bashir. Krediet:L. Brian Stauffer
"We gebruikten rekenmodellen, onder leiding van professor werktuigbouwkunde en techniek Mattia Gazzola, om te bepalen welke fysieke kenmerken zouden leiden tot het snelste en meest efficiënte zwemmen, " zei Saif. "Bijvoorbeeld, we hebben gekeken naar variaties in het aantal staarten en staartlengtes voor het meest efficiënte ontwerp van de biohybride zwemmer."
"Gezien het feit dat biologische actuatoren, of biobots, zijn niet zo volwassen als andere technologieën, ze zijn niet in staat om grote krachten te produceren. Dit maakt hun beweging moeilijk te controleren, " Gazzola zei. "Het is erg belangrijk om de steiger waar de biobots omheen groeien en waarmee ze communiceren, zorgvuldig te ontwerpen om het meeste uit technologie te halen en locomotieffuncties te bereiken. De computersimulaties die we uitvoeren, spelen een cruciale rol in deze taak, omdat we een aantal mogelijke ontwerpen kunnen overspannen en alleen de meest veelbelovende kunnen selecteren om in het echte leven te testen."
"Het vermogen om spieractiviteit te stimuleren met neuronen maakt de weg vrij voor verdere integratie van neurale eenheden in biohybride systemen, Saif zei. "Gezien ons begrip van neurale controle bij dieren, het is misschien mogelijk om verder te gaan met biohybride neuromusculaire ontwerpen door een hiërarchische organisatie van neurale netwerken te gebruiken."
Saif zei dat hij en zijn team zich deze vooruitgang voorstellen die leidt tot de ontwikkeling van meercellige, gemanipuleerde levende systemen met het vermogen om intelligent te reageren op omgevingssignalen voor toepassingen in bio-engineering, geneeskunde en zelfherstellende materiaaltechnologieën.
Echter, het team erkent dat - net als levende organismen - geen twee biohybride machines zich zullen ontwikkelen om precies hetzelfde te zijn.
"Net zoals tweelingen niet echt identiek zijn, twee machines die zijn ontworpen om dezelfde functie uit te voeren, zullen niet hetzelfde zijn, "Zei Saif. "De ene kan sneller bewegen of genezen van schade anders dan de andere - een unieke eigenschap van levende machines."
 Een nieuwe draai aan de oorsprong van het leven?
Een nieuwe draai aan de oorsprong van het leven?- Chemie zorgt voor een nieuwe voorraad van een veelbelovende kanker- en hiv-behandeling
- Wetenschappers ontdekken nieuw bacterieel resistentiemechanisme tegen peptide-antibiotica
- Elke stap van cycloadditiereacties op het oppervlak visualiseren
- Wetenschappers hebben zeer sterk materiaal ontwikkeld voor de vliegtuigindustrie
- Stam in de buurt van de grootste stad van Brazilië vecht om vol te houden
- De diepe koolstofcyclus begrijpen
- NASA kijkt naar tropische storm Son-Tinh die het eiland Hainan treft, China
- Synthetische smaragden maken
- De economische waarde van insectenbestuivingsdiensten is veel hoger dan eerder werd gedacht in de VS
Hoofdlijnen
- Zeehonden en onze kusten
- CMU-software assembleert RNA-transcripten nauwkeuriger
- De voordelen van het hebben van een groot aantal chromosomen
- Lijst met waterverontreinigende stoffen
- Polygene eigenschappen: definitie, voorbeeld en feiten
- Hoe het Curiosity-project werkt
- Wat maakt DNA-vingerafdrukken uniek?
- Reuzenberenklauwsap kan je zonnebrand geven
- Overeenkomsten in de structuur van mitochondria en chloroplasten
- Net als tandpasta:Fluoride verbetert de stabiliteit van perovskiet-zonnecellen radicaal
- Telegram zegt dat Apple pad heeft vrijgemaakt voor app-update

- Britse autoverkopen raken opnieuw in de war:gegevens

- VK stelt voor om likes op sociale media voor kinderen te verbieden

- Te popelen om schandaal te verlaten, Nissan pronkt met technologie voor soepel rijden


 Om zijn kracht te waarderen, beschouw design als een drug
Om zijn kracht te waarderen, beschouw design als een drug- Wat zijn wisselcontacten?
- Nieuw kwantumapparaat ingesteld om meetstandaarden van elektrische stroom te ondersteunen
- Het ruimteschip van Elon Musk is misschien meer een morele catastrofe dan een gewaagde stap in de verkenning van de ruimte
- Zuid-Koreaans ruilt bitcoins voor 2 mln euro in valse biljetten
- NASA Visualization Explorer-app nu beschikbaar voor Android
- Insecticide en klimaatopwarming hebben invloed op insectengemeenschappen
- NASA-sonde Osiris-Rex gaat asteroïde Bennu kussen tijdens historische missie
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Norway | Spanish |

-
Wetenschap © https://nl.scienceaq.com
