Wetenschap
Zelfvouwende Rollbot maakt de weg vrij voor volledig ongebonden zachte robots
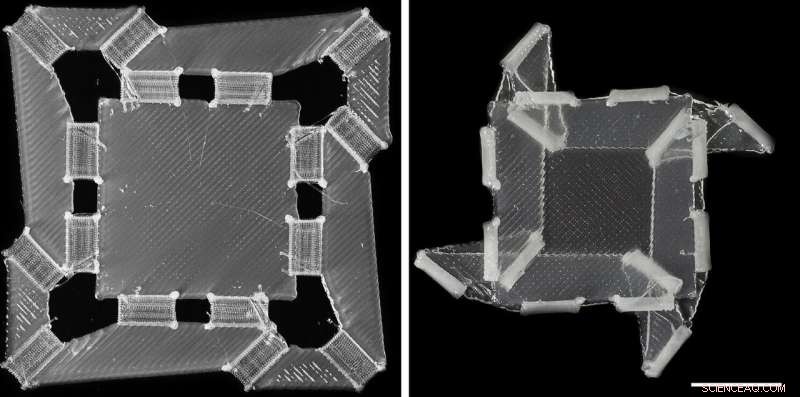
Origami-eenheid met vierkante draai. Krediet:Kotikian et al., Wetenschap. Robot. 4, eaax7044 (2019)
De meeste zachte robots zijn tegenwoordig afhankelijk van externe voeding en controle, ze vastgebonden houden aan off-board systemen of opgetuigd met harde componenten. Nutsvoorzieningen, onderzoekers van de Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) en Caltech hebben zachte robotsystemen ontwikkeld, geïnspireerd door origami, die kunnen bewegen en van vorm kunnen veranderen als reactie op externe prikkels, de weg vrijmaakt voor volledig ongebonden zachte robots.
Het onderzoek is gepubliceerd in Wetenschap Robotica .
"De mogelijkheid om actieve materialen te integreren in 3D-geprinte objecten maakt het ontwerpen en vervaardigen van geheel nieuwe klassen van zachte robotstof mogelijk, " zei Jennifer A. Lewis, de Hansjorg Wyss Professor of Biologically Inspired Engineering bij SEAS en co-hoofdauteur van de studie.
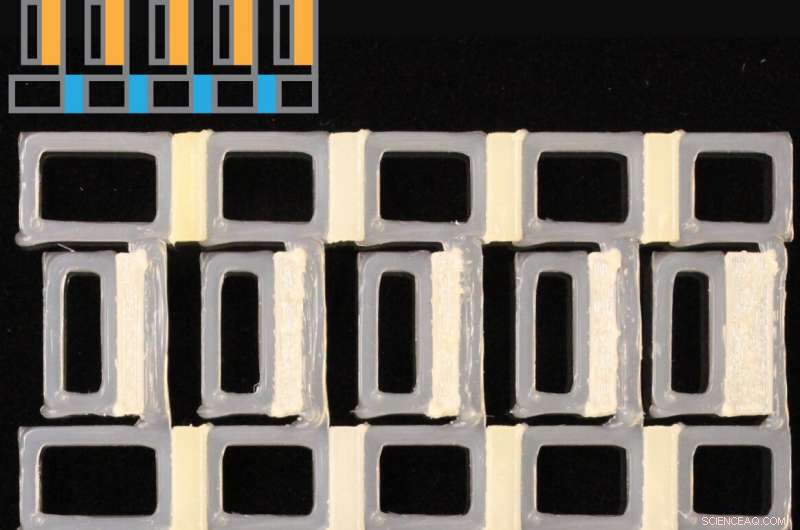
De onderzoekers wendden zich tot origami om multifunctionele zachte robots te maken. Door opeenvolgende vouwen, origami kan meerdere vormen en functionaliteiten coderen in een enkele structuur. Door gebruik te maken van materialen die bekend staan als vloeibaar-kristalelastomeren die van vorm veranderen wanneer ze worden blootgesteld aan hitte, het onderzoeksteam heeft twee soorten zachte scharnieren 3D-geprint die bij verschillende temperaturen vouwen en dus kunnen worden geprogrammeerd om in een specifieke volgorde te vouwen.
"Met onze methode van 3D-printen van actieve scharnieren, we hebben volledige programmeerbaarheid over temperatuurrespons, de hoeveelheid koppel die de scharnieren kunnen uitoefenen, hun buighoek, en vouworiëntatie. Onze fabricagemethode vergemakkelijkt de integratie van deze actieve componenten met andere materialen, " zei Arda Kotikian, een afgestudeerde student aan SEAS en de Graduate School of Arts and Sciences en co-eerste auteur van het papier.
"Het gebruik van scharnieren maakt het gemakkelijker om robotfuncties te programmeren en te bepalen hoe een robot van vorm zal veranderen. In plaats van het hele lichaam van een zachte robot te laten vervormen op manieren die moeilijk te voorspellen zijn, u hoeft alleen maar te programmeren hoe een paar kleine delen van uw structuur zullen reageren op veranderingen in temperatuur, " zei Connor McMahan, een afgestudeerde student aan Caltech en co-eerste auteur van het papier.
Om deze methode te demonstreren, Kotikian, McMahan, en het team bouwde verschillende zachte apparaten, inclusief een ongebonden zachte robot met de bijnaam de 'Rollbot'. De Rollbot begint als een vlakke plaat, ongeveer 8 centimeter lang en 4 centimeter breed. Wanneer geplaatst op een heet oppervlak, ongeveer 200°C, een set scharnieren vouwt en de robot krult in een vijfhoekig wiel.
Een andere set scharnieren is ingebed aan elk van de vijf zijden van het wiel. Een scharnier vouwt in contact met het hete oppervlak, het wiel voortstuwen om naar de volgende kant te draaien, waar het volgende scharnier vouwt. Terwijl ze van het hete oppervlak rollen, de scharnieren ontvouwen zich en zijn klaar voor de volgende cyclus.
"Veel bestaande zachte robots hebben een verbinding met externe stroom- en controlesystemen nodig of worden beperkt door de hoeveelheid kracht die ze kunnen uitoefenen. Deze actieve scharnieren zijn handig omdat ze zachte robots in staat stellen te werken in omgevingen waar snoeren onpraktisch zijn en om objecten vele malen op te tillen zwaarder dan de scharnieren, ’ zei McMahan.
Een ander apparaat, wanneer geplaatst in een warme omgeving, kan worden opgevouwen tot een compacte gevouwen vorm die lijkt op een paperclip en ontvouwt zichzelf wanneer het afgekoeld is.
"Deze ongebonden structuren kunnen passief worden gecontroleerd, " zei Kotikian. "Met andere woorden, het enige wat we hoeven te doen is de constructies bloot te stellen aan specifieke temperatuuromgevingen en ze zullen reageren op de manier waarop we de scharnieren hebben geprogrammeerd."
Hoewel dit onderzoek zich alleen richtte op temperatuurreacties, vloeibaar kristal elastomeren kunnen ook worden geprogrammeerd om te reageren op licht, pH, vochtigheid en andere externe prikkels.
Zelfrijdende Rollbot weergegeven in de gedrukte configuratie (boven) en in de opgevouwen configuratie (hieronder). Krediet:Kotikian et al., Wetenschap. Robot. 4, eaax7044 (2019)
"Dit werk laat zien hoe de combinatie van responsieve polymeren in een samengesteld composiet kan leiden tot materialen met zelfbediening als reactie op verschillende stimuli. In de toekomst zullen dergelijke materialen kunnen worden geprogrammeerd om steeds complexere taken uit te voeren, de grenzen tussen materialen en robots vervagen, " zei Chiara Daraio, Hoogleraar Werktuigbouwkunde en Toegepaste Natuurkunde bij Caltech en co-hoofdauteur van de studie.
 Overgebleven graan van brouwerijen kan worden omgezet in brandstof voor huizen
Overgebleven graan van brouwerijen kan worden omgezet in brandstof voor huizen- Antibacteriële prodrug door zich te richten op intracellulaire metaboliet
- Oppervlaktechemie modelleren en nieuwe materialen voorspellen
- Rood, groente, en blauw licht kan worden gebruikt om genexpressie in gemanipuleerde E. coli te regelen
- De vloeibare assemblagelijn van ingenieurs maakt microdeeltjes van medicijnen duizend keer sneller dan ooit tevoren
- De energiecyclus in een ecosysteem
- China zegt dat smog die steden bedekt, eindelijk snel kan vervagen
- Wetenschappers dringen aan op snelle omschakeling naar hernieuwbare energie in het Midden-Oosten
- Welke huizen overleefden bosbranden? Vaak, degenen die zijn gebouwd om te coderen
- Hoe te differentiëren tussen een mannelijke & vrouwelijke mus
Hoofdlijnen
- Wat zijn Prions?
- Robotapparaat volgt plantengroei op cellulair niveau
- Nieuwe genen op verslechterend Y-chromosoom
- De Manchineel,
- Blade runner benen geven verminkte Thaise hond nieuw leven
- Vitamine E-ontdekking in maïs kan leiden tot meer voedzame gewassen
- Welke organellen worden beschouwd als het cellen recyclingscentrum?
- Mieren in het bladerdak van het Amazone-regenwoud hebben veel meer bacteriën in hun ingewanden dan grondbewoners
- Hoe gender en stereotypen onze relatie met honden kunnen bepalen
- Team bouwt de eerste levende robots
- Wat is de waarde van een robotleven?

- Groei in datalekken toont noodzaak overheidsregulering aan

- CyLab-onderzoekers stellen nieuwe regels voor eerlijkheid op internet voor

- Amazon is geïnfiltreerd in het e-mailsysteem van eBay om topverkopers te stropen in wereldwijde samenzwering:rechtszaak


 Vermindering van individuele plantengroei verhoogt soms de veerkracht van de gemeenschap
Vermindering van individuele plantengroei verhoogt soms de veerkracht van de gemeenschap- Hoe de helling of Grade
- Slimme mobiele tool kan worden gebruikt om ernstige ziekten te diagnosticeren en te behandelen
- NASA-satellietbeelden vinden Rebekah nu post-tropisch
- Wat is het verschil tussen wespen en horzels?
- Exoplaneten:hoe we chemie gebruikten om de werelden te identificeren die het meest waarschijnlijk leven bevatten
- Vluchttijdlijn na de Tweede Wereldoorlog
- Zoutconcentraties in ijskernen kunnen recept voor DO-evenementen onthullen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Swedish | German | Dutch | Danish | Norway | Portuguese |

-
Wetenschap © https://nl.scienceaq.com
