Wetenschap
Een Rubiks Cube oplossen met een handige hand
Krediet:Li et al.
In recente jaren, een groeiend aantal onderzoekers heeft het gebruik van robotarmen of behendige handen onderzocht om een verscheidenheid aan alledaagse taken op te lossen. Hoewel velen van hen met succes eenvoudige taken hebben aangepakt, zoals grijpen of elementaire manipulatie, complexe taken die meerdere stappen en nauwkeurige/strategische bewegingen met zich meebrengen, zijn tot nu toe moeilijker gebleken om aan te pakken.
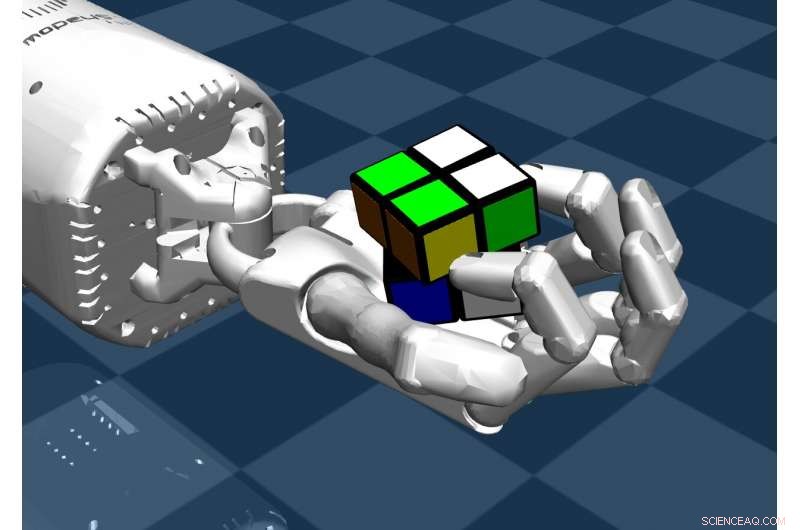
Een team van onderzoekers van de Chinese Universiteit van Hong Kong en Tencent AI Lab heeft onlangs een op deep learning gebaseerde benadering ontwikkeld om een Rubik's Cube op te lossen met behulp van een behendige hand met meerdere vingers. Hun aanpak, gepresenteerd in een paper dat vooraf is gepubliceerd op arXiv, stelt een behendige hand in staat om meer geavanceerde manipulatietaken in de hand op te lossen, zoals de beroemde Rubik's Cube-puzzel.
Een Rubik's Cube is een plastic kubus bedekt met veelkleurige vierkanten die in verschillende posities kunnen worden verschoven. Het doel van de puzzel is om de secties van de kubus strategisch te draaien en te draaien totdat alle vierkanten op elk van de vlakken dezelfde kleur hebben.
"Om te zien dat sommige onderzoekers robothanden met meerdere vingers gebruiken voor taken zoals het verplaatsen van een object en het manipuleren van een gereedschap, we hebben overwogen of we een robothand kunnen gebruiken voor meer gecompliceerde taken, zoals het oplossen van een Rubiks kubus, "Tingguang Li, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore.
Om de Rubik's Cube-puzzel aan te pakken met een behendige hand, Li en zijn collega's ontwikkelden een hiërarchisch leermodel voor diepe versterking dat de taak in wezen scheidt in een plannings- en een manipulatiefase. In hun studie hebben de onderzoekers pasten deze benadering toe op een vijfvingerige behendige hand genaamd de Shadow Hand.
"De uitdagingen van het oplossen van een Rubiks kubus met behulp van een robothand zijn tweeledig:ten eerste, het besturen van een robothand is erg moeilijk omdat deze een hoge mate van vrijheid heeft; tweede, het oplossen van een Rubiks kubus vereist een lange bewegingsreeks, " legde Li uit. "Ons idee combineert een diep versterkend leeralgoritme, die veel succesvolle toepassingen heeft, en menselijke kennis. Het doel is om de behendigheid van een robothand te tonen en een willekeurig gecodeerde Rubik's Cube met een hoog slagingspercentage op te lossen.
Het door de onderzoekers voorgestelde hiërarchische model heeft twee belangrijke componenten:een voor planning en een voor manipulatie. aanvankelijk, de planningscomponent (d.w.z. een op modellen gebaseerde kubusoplosser) identificeert de optimale modusvolgorde voor het oplossen van de puzzel. Vervolgens, de manipulatiecontroller (d.w.z. een modelvrije kubusoperator) bestuurt de vingers van de behendige hand om deze stappen uit te voeren.
"Onze aanpak heeft twee lagen:de hogere laag plant een traject voor het oplossen van een Rubik's Cube die is samengesteld uit atomaire acties, en de onderste laag leert elke atoomactie uit te voeren, " zei Li. "De atomaire acties worden geleerd via een leermodel voor diepe versterking, het handmatig ontwerpen van ingewikkelde low-level controllers wegwerken."
De onderzoekers trainden en evalueerden hun model met behulp van een high-fidelity simulator, die ze ook hebben gebouwd. Ze testten de prestaties van hun model in een reeks experimenten waarbij de virtuele behendige hand werd gevoed met 1400 willekeurig gecodeerde Rubik's Cubes en ontdekten dat het een gemiddeld slagingspercentage van 90,3 procent behaalde.
"We hebben aangetoond dat de robothand met meerdere vingers een enorm potentieel heeft voor gecompliceerde taken, "Zei Li. "Het integreren van op leren gebaseerde algoritmen kan helpen om het zware werk van het handmatig ontwerpen van besturingsalgoritmen te verminderen. Ik hoop dat dit meer onderzoekers naar dit gebied zal trekken en hen zal aanmoedigen om nieuwe benaderingen te ontwikkelen om de behendigheid van robothanden verder te vergroten."
-
Krediet:Li et al.
-

Krediet:Li et al.
-
Krediet:Li et al.
In tegenstelling tot eerder voorgestelde benaderingen, het door Li en zijn collega's ontwikkelde model maakt het mogelijk om een complexere manipulatietaak in de hand uit te voeren met behulp van een behendige hand, specifiek het oplossen van een Rubik's Cube. Tot dusver, de onderzoekers hebben hun aanpak alleen in simulaties geëvalueerd, maar ze zijn nu van plan hun algoritme toe te passen op een echte robothand.
© 2019 Wetenschap X Netwerk
 Hoe technologie die is ontworpen voor de ruimte, kan helpen bij het opsporen van ziekten op planeet Aarde
Hoe technologie die is ontworpen voor de ruimte, kan helpen bij het opsporen van ziekten op planeet Aarde- Nobelprijswinnende Japanse chemicus sterft op 85
- Gesimuleerd microzwaartekrachtsysteem gemaakt om te experimenteren met materialen
- Fotokatalytische waterstofproductie uit water
- Van borstimplantaten tot ijsblokjesbakjes - hoe siliconen onze keukens overnamen
- Catfish Fungus
- De polsslag van een vulkaan kan worden gebruikt om de volgende uitbarsting te voorspellen
- Landbouwbranden in Brazilië schaden de gezondheid van baby's, een waarschuwing voor de derde wereld
- Overzicht van Chinees atmosferisch wetenschappelijk onderzoek in de afgelopen 70 jaar:klimaat en klimaatverandering
- Voeg gewoon (mantel)water toe:nieuw onderzoek doorbreekt het mysterie van hoe de eerste continenten werden gevormd
Hoofdlijnen
- Critici slaan VS over import van olifantentrofeeën
- Mysterieuze nieuwe zeebodemsoorten werpen licht op vroege evolutie van dieren
- Welke functies delen mitochondria en bacteriën?
- Wat zijn energiegerelateerde organellen?
- Meer dan 38 procent van de Neotropische papegaaienpopulatie op het Amerikaanse continent wordt bedreigd door menselijke activiteit
- Cat Chromosome-informatie
- Gene drives hebben het potentieel om muggenpopulaties te onderdrukken, maar resistente muggen duiken op
- Waarom zou een cel veel rRNA maken, maar slechts één exemplaar van DNA?
- Bedwantsen proberen in je vuile was te komen
- Cyprus begint aan bouw van Europa's grootste casino

- op 50, Europa's oudste kerncentrale niet klaar om met pensioen te gaan

- Intelligente sleeptank voert automatisch 100, 000 experimenten in slechts één jaar

- Huawei geeft werknemers bonus voor omgaan met Amerikaanse sancties

- Air Canada neemt 16 opnieuw in dienst, 500 werknemers ontslagen vanwege pandemie


 Als het om beleggen gaat, liefde op het eerste gezicht loont niet altijd
Als het om beleggen gaat, liefde op het eerste gezicht loont niet altijd- 10 manieren waarop gegevens werden gebruikt om ziekten te bestrijden
- Popcornvormige gouddeeltjes komen samen op Salmonella
- Van Parijs tot Sjanghai, mensen zijn zich grotendeels niet bewust van de risico's van luchtvervuiling binnenshuis
- Duurzame chemische synthese met platina
- Kijkend naar de sterren, of langs de weg vallen? Hoe astronomie vrouwelijke wetenschappers in de steek laat
- Multi-inch monokristallijn perovskiet voor zelfaangedreven fotodetectie met geïntegreerde schakelingen gerapporteerd
- Ubers eerste helikoptervluchten naar New York
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- Italian | Spanish | Portuguese | German | Dutch | Danish | French | Swedish | Norway |

-
Wetenschap © https://nl.scienceaq.com
