Wetenschap
Een ultra-rekbare tribo-elektrische stripsensor (TSS) om objecten in 3D-ruimte te besturen
Krediet:Chen et al.
Nanogeneratoren, technologische hulpmiddelen die mechanische of thermische energie kunnen omzetten in elektriciteit, komen in drie belangrijke ontwerpen:piëzo-elektrisch, tribo-elektrisch en pyro-elektrisch. Terwijl piëzo-elektrische en tribo-elektrische nanogeneratoren mechanische energie kunnen omzetten in elektriciteit, pyro-elektrische werken door het oogsten van thermische energie.
De afgelopen jaren is tribo-elektrische nanogeneratoren zijn steeds populairder geworden voor zowel energieoogst- als detectietoepassingen. Tot dusver, echter, hun prestaties in multidimensionale informatieperceptie en interactieve controletaken waren nogal teleurstellend.
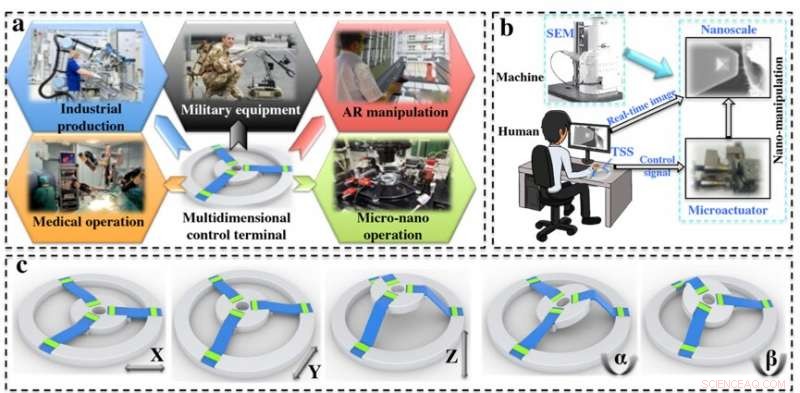
Onderzoekers van de National University of Singapore hebben onlangs sensoren ontwikkeld voor het besturen van objecten in de 3D-ruimte op basis van tribo-elektrische nanogeneratoren. Deze sensoren, gepresenteerd in een paper gepubliceerd in Nano-energie , bestaan uit een parallelle structuur met drie symmetrische sensorstrips die op de basis zijn bevestigd en een mobiel platform dat ermee verbonden is.
"Met de ontwikkeling van de wetenschap, automatiserings- en robottechnologieën zijn doorgedrongen tot vele aspecten van menselijke activiteiten, "Tao Chen, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Robots worden niet alleen veel gebruikt in automatische productielijnen en entertainmentgebieden, maar kan ook medische, ruimtevaart en militaire toepassing, evenals vele anderen. Echter, er zijn ontoegankelijke, onvoorziene gevaarlijke of onvermijdelijke uitdagingen voor mensen om te interageren of complexe taken uit te voeren in omgevingen waar apparatuur in vacuüm wordt gehouden, onderzees, ruimte en nanometerschaal, enzovoort."
Om effectieve interacties tussen mensen en geautomatiseerde systemen mogelijk te maken, onderzoekers hebben bedieningsterminals ontwikkeld die op verschillende manieren kunnen worden bediend, zoals touchscreens, toetsenborden of rockerstructuren. In de meeste gevallen, deze controlemechanismen zijn indirect, daarom hebben ze complexe instructieanalyses en berekeningen nodig om overeen te komen met de bewegingstoestand van het te manipuleren object.
"In deze krant, we presenteren een ultra-rekbare tribo-elektrische stripsensor (TSS) voor het regelen van de houding van het object in de ruimte, " legde Chen uit. "Onze TSS zou de prestaties van robots in verschillende omgevingen kunnen verbeteren, inclusief onderzeese, ruimte en meer."
In hun studie hebben Chen en zijn collega's gebruikten een ultra-rekbare tribol-elektrische strip als ruimtelijke sensor, waardoor robots uiteindelijk objecten in de 3D-ruimte kunnen besturen. Vanwege het koppelingseffect van tribo-elektrificatie en elektrostatische inductie, de lengte van de strip verandert, waarbij hetzelfde vingercontactpunt verschillende signaaloutputverhoudingen genereert van twee aansluitelektroden (E1 en E2). Deze elektroden fungeren als de interactieve interface voor multidimensionale detectie en controle.
"Het ene uiteinde van de E1-elektrode van de strip zit vast, terwijl elektrode E2 beweegbaar is onder trekspanning ten opzichte van E1, Chen zei. "De uitgangsspanningsverhouding van de twee elektroden (VE2/VE1) wordt verkregen tijdens het contact en de scheiding van vinger en siliconenrubber met een constante afstand van E1. Verder, de strook wordt over een bepaalde lengte uitgerekt, de afname van de spanningsverhouding wordt bepaald als we dezelfde positie (referentiepunt) opnieuw aanraken op een constante afstand ten opzichte van de E1-elektrode."
Naarmate de reklengte van de strip toeneemt, deze spanningsverhouding neemt af. Het mechanisme dat door Chen en zijn collega's werd gebruikt, stelde hen in staat om de verlengde lengte van de E2-zijde van de strip te meten, door het referentiepunt aan te raken dat is vastgelegd vanaf E1. Met andere woorden, de verplaatsing van hun strip terwijl deze wordt uitgerekt, de reksnelheid en de versnelling van de E2-elektrode kunnen allemaal worden gemeten met een constante contactfrequentie.
"Het principe van sensordetectie dat hier wordt gebruikt, is voornamelijk om de lengte te bepalen door de spanningsverhouding tussen de twee elektroden te vergelijken, "zei Chen. "Dienovereenkomstig, het detectiemechanisme met behulp van de spanningsverhoudingsmethode vermijdt de invloed van omgevingsvochtigheid en ongelijke kracht. Dus, dit is een effectieve detectiemethode om instabiliteit en interferentie te voorkomen."
Chen en zijn collega's introduceerden een nieuwe objectdetectiemethode op basis van een longitudinale bewegingssensor die gebruikmaakt van gegenereerde spanningsverhoudingen. In hun studie hebben ze gebruikten drie zelfaangedreven flexibele sensoren om een 5D-positioneringsprojectie in de ruimte te bereiken. Hun methode is eenvoudiger en intuïtiever dan de onderliggende traditionele rigide (niet-rekbare) structuren, maar het voegt ook ruimtedimensies toe.
"Momenteel, de bediening van nanoschaal met handvat of sleutelmodus is niet intuïtief, " zei Chen. "Onze aanpak kan flexibeler en intuïtiever zijn voor mens-machine-interacties op nanoschaal."
In een voorlopige demonstratie de onderzoekers gebruikten hun TSS-apparaat als een mens-nanomachine-terminal om hun nanomanipulator te besturen in een scanning-elektronenmicroscopie (SEM) -taak. Bij deze taak hun apparaat stelde hen in staat om de koolstofnanobuizen te bedienen en de extractie van koolstofnanobuizen met succes te voltooien.
"De resultaten van micro-nanomanipulatie die we hebben verzameld, bevestigen de uitstekende prestaties van het TSS-apparaat op perceptuele en controletoepassingen, die relevant zijn voor gebieden als robotica, VR en IoT, " zei Chen. "In een vervolgonderzoek, we zijn van plan om onderzoek te doen naar de tweehandencontroller, om meer intuïtieve en gemakkelijke mens-machine-interactie te bereiken."
© 2019 Wetenschap X Netwerk

Hoofdlijnen
- Twee neuropeptiden in zebravissen geven aanwijzingen voor de complexe neurale mechanismen die ten grondslag liggen aan slaap
- Infectieziekten:CTRL + ALT + Delete
- Wetenschappers ontrafelen mysteries van DNA-replicatie in maïs
- Relatie tussen celstructuur en functie
- Waarschijnlijkheden in de genetica: waarom is het belangrijk?
- Waarom zijn er 61 Anticodonen?
- Stamcellen die vetweefsel genereren, hebben een circadiane klok
- Een nieuwe rol voor insuline als vitale factor bij het in stand houden van stamcellen
- Onderzoekers identificeren genen die zoogdieren van andere dieren onderscheiden
- CBS in gesprek over exit voor beschuldigde CEO Moonves:media

- Boeing zegt geen ontslagvergoeding voor afgezette CEO Muilenburg

- Google, Facebook stemt in met EU-gedragscode voor nepnieuws

- MH370-zoekopdracht wordt beoordeeld, kan worden gesloopt:Mahathir

- Gadgets:Draadloos is tegenwoordig de hete oordopje - met een goede reden


 Wetenschappers gaan ver in studie naar elektronenoverdracht
Wetenschappers gaan ver in studie naar elektronenoverdracht- Volkswagen in gesprek om massale rechtszaak tegen Duitse dieselgate te regelen
- Feiten over magneten
- Global Gaia-campagne onthult geheimen van stellair paar
- Wat zijn de verschillende soorten microscopie gebruikt in een microbiologisch laboratorium?
- Gregor Mendel - Vader van genetica: biografie, experimenten en feiten
- Onderzoek suggereert dat het ongrijpbare neutrino een aanzienlijk deel van donkere materie kan uitmaken
- Klein apparaatje zet grote stap in niet-invasieve foetale bloedtesttechnologie
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
