Wetenschap
Een kansbeperkend bewegingsplanningssysteem voor hoogdimensionale robots
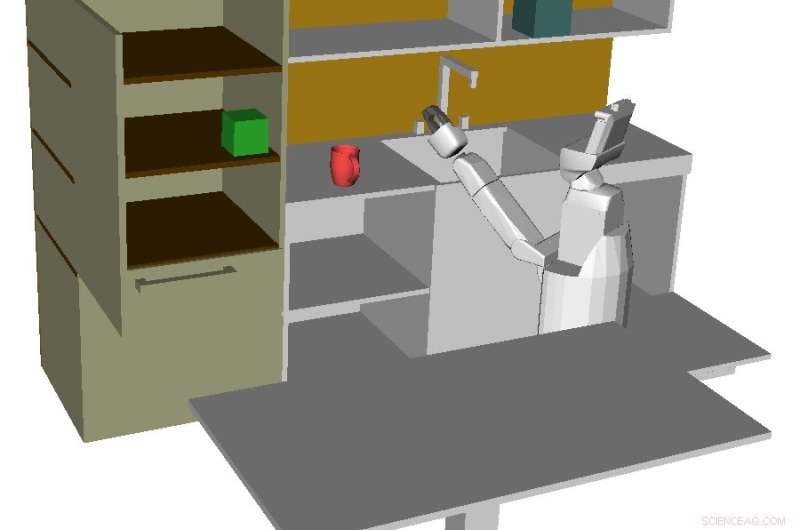
Simulatieomgeving voor een robot waarin de onderzoekers hun algoritme testten. Krediet:Dai et al.
Onderzoekers van het Computer Science and Artificial Intelligence Laboratory van MIT hebben onlangs een kansbeperkend bewegingsplanningssysteem ontwikkeld dat kan worden toegepast op robots met een hoge mate van vrijheid (DOF) bij bewegingsonzekerheid en in gevallen van onvolmaakte toestandsinformatie. Hun aanpak, geschetst in een paper dat vooraf is gepubliceerd op arXiv, kan haalbare trajecten vinden die voldoen aan een door de gebruiker gespecificeerde grens over de kans op een botsing.
"De belangrijkste inspiratiebron van dit werk is de beperking van bestaande kansbeperkende bewegingsplanners, "Siyu Dai, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Ik ontdekte dat veel ultramoderne bewegingsplanners obstakels moeten formuleren in convexe vormen, wat onhaalbaar is voor planning in hoogdimensionale domeinen, bijvoorbeeld manipulator motion planning. Andere reguliere kansbeperkende bewegingsplanners zijn gebaseerd op snel onderzoekende random tree (RRT)-methoden, waarvan de snelheid in hoog-dimensionale planningstaak zeer zorgwekkend is."
Om de beperkingen van bestaande bewegingsplanningssystemen aan te pakken, Dai en haar collega's wilden een snel reagerende en kansarme bewegingsplanner ontwikkelen. Een dergelijke bewegingsplanner zou met name handig zijn voor robots die taken uitvoeren die onderhevig zijn aan ernstige verstoringen en beperkte observaties, zoals onderwatermanipulatie.
Probabilistische Chekov (p-Chekov), het systeem dat ze hebben gemaakt, is gebaseerd op hun eerdere werk in deterministische bewegingsplanning, die trajectoptimalisatie integreerde in een schaars roadmapraamwerk. P-Chekov gebruikt een lineair-kwadratische Gaussiaanse bewegingsplanningsbenadering om de kansverdeling van een robot te schatten. Vervolgens past het kwadratuurtheorieën toe op schattingen van botsingsrisico's van waypoints en past het de benaderingen voor risicotoewijzing aan om toelaatbare faalkansen toe te kennen aan waypoints.
"Het kansbeperkende bewegingsplanningssysteem dat in onze paper is ontwikkeld, omvat een deterministische planningscomponent en een risicobeoordelingscomponent, Dai legde uit. "De deterministische component construeert eerst een routekaart die bestaat uit haalbare, botsingsvrije randen op basis van de omgevingsinformatie. In de online planningstaken, het zoekt vervolgens naar een haalbaar traject uit de roadmap en maakt het glad met een trajectoptimalisatie. Dit traject wordt vervolgens doorgegeven aan de risicobeoordelingscomponent, die het risico van een botsing evalueert op basis van de schatting van geluiden."
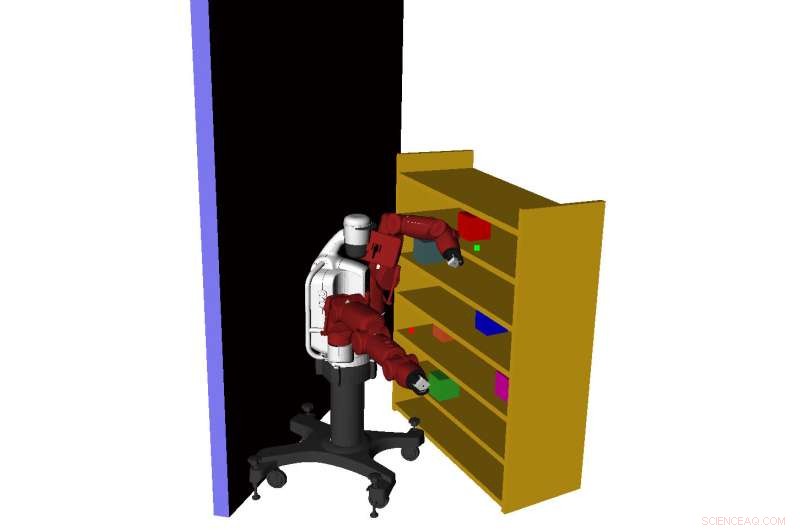
Simulatieomgeving voor een robot waarin de onderzoekers hun algoritme testten. Krediet:Dai et al.
Als het aanvaringsrisico berekend door de risicobeoordelingscomponent van P-Chekov de vooraf gedefinieerde kansbeperking schendt, het traject wordt teruggegeven aan de deterministische planner en er worden nieuwe beperkingen toegevoegd, om een traject met een lager risico te vinden. Als het risico van een aanvaring voldoet aan de kansbeperking, het systeem voert gewoon het voorgestelde traject uit.
In tegenstelling tot bestaande risicobewuste motion planners, P-Chekov kan worden toegepast op robotplanningstaken met een hoge DOF, zonder obstakels in convexe vormen te hoeven formuleren. Bij simulatietesten het systeem verminderde effectief de risico's van botsingen en bevredigde door de gebruiker gespecificeerde kansbeperkingen in real-world planningsscenario's die vaak worden aangetroffen door hoogdimensionale robots.
"We hebben een kansbeperkend bewegingsplanningssysteem opgezet dat hoogdimensionale bewegingsplanningstaken kan opnemen, Dai zei. "Dit betekent dat bewegingsplanning met beperkte kans niet langer beperkt is tot rij-achtige taken, maar kan nu worden toegepast op mobiele robots met armen, bijvoorbeeld menselijke ondersteunende robots en onderwatermanipulatoren, die plannen kan maken op basis van verschillende vereisten van het risiconiveau."
In de toekomst, P-Chekov kan worden toegepast op een verscheidenheid aan hoogdimensionale robots, het verbeteren van hun bewegingsplanning onder onzekerheid. Ondanks de veelbelovende resultaten, de uitkomsten van de planningsfase van het systeem kunnen soms te conservatief zijn, vanwege suboptimale risicoallocaties en een beperkt aantal kwadratuurknooppunten.
Bij voorproeven is de onderzoekers zijn al begonnen met het evalueren van technieken die de bruikbaarheid van het systeem zouden kunnen verbeteren. In de tussentijd, ze zijn ook van plan om P-Chekov's algoritme voor het schatten van de kans op botsingen te verbeteren, om zijn vermogen om conflicten te vermijden verder te vergroten.
"De belangrijkste richting van onze volgende onderzoeken is het verbeteren van het risicobeoordelingsalgoritme om het hele bewegingsplanningsproces te versnellen en de planner snel reactief te maken, ' zei Dai.
© 2018 Wetenschap X Netwerk
 Defecten aan het oppervlak van katalysatoren bepalen hun activiteit
Defecten aan het oppervlak van katalysatoren bepalen hun activiteit- Experimenten over States of Matter for Kids
- Nieuwe biotechtechniek versnelt onderzoek naar eiwittherapie
- Solvation-herschikking brengt stabiele zink/grafietbatterijen dichter bij commerciële netopslag
- Speciale levering:Macromoleculen via spinnenbeet
- Antarctica:scheuren in het ijs
- Pauze in de opwarming van de aarde was nooit echt, nieuw onderzoek bewijst
- NASA's Terra-satelliet toont rokerige bleekheid over het grootste deel van Californië
- België creëert vuilnissnelweg voor afval van slachtoffers van overstromingen
- Tien manieren waarop klimaatverandering bosbranden kan verergeren
Hoofdlijnen
- Feiten over de Spleen
- Het verschil tussen hoe interne en externe regulatoren werken
- Hoe Agarose Gel te interpreteren
- Eksters kunnen vriendschappen sluiten met mensen - dit is hoe
- Anafase: wat gebeurt er in dit stadium van mitose en meiose?
- Bestrijding van het witte-neussyndroom bij vleermuizen
- Regenboogkleuren onthullen celgeschiedenis
- Drie voorbeelden van protisten met wetenschappelijke namen
- Kikkers onthullen mechanisme dat de levensvatbaarheid van hybriden bepaalt
- VS dringen er bij bondgenoten op aan Huawei te mijden:WSJ
- Ablatie gebruiken om de structuur van kunstmatige neurale netwerken te onderzoeken

- Google gaat in beroep tegen record EU-boete over Android

- Cloudgebaseerde tool biedt duidelijke communicatie voor rampsituaties

- Facebook zegt Portal-apparaat niet om mee te snuffelen


 India lijdt heetste decennium ooit
India lijdt heetste decennium ooit- SimBlock:een simulator voor het testen van verbeteringen aan real-world blockchain-netwerken
- Nieuwe grote optisch heldere supernovarest ontdekt
- Een reus, prehistorische otters verrassend krachtige beet
- Studie geeft eerste bewijs dat de aarde een natuurlijke thermostaat heeft
- De afvalverzamelende fietsers die de aandacht van de VN trokken
- Wetenschappers ontdekken hoe RNA poII nauwkeurige transcriptie handhaaft met supercomputer
- Beleggingsfondsen met lagere belastingdruk hebben een hoger rendement
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
