Wetenschap
Een op insecten geïnspireerde drone vervormt bij impact

De veerkracht van de drone komt voort uit een unieke combinatie van stijve en elastische lagen. Krediet:Alain Herzog / EPFL
In recente jaren, robotica-experts hebben een pagina uit de traditionele Japanse praktijk van origami genomen en zijn op de proppen gekomen met licht, flexibel, en zeer innovatieve robots en drones. Er zijn twee soorten op origami geïnspireerde structuren ontstaan:stijve structuren die een bepaald draagvermogen hebben, maar die breken als die capaciteit wordt overschreden, en flexibel, veerkrachtige constructies die niet veel kunnen dragen.
EPFL-onderzoekers, toepassen van wat ze zagen over insectenvleugels, hebben een hybride origami-drone ontwikkeld die afhankelijk van de omstandigheden stijf of flexibel kan zijn. Wanneer in de lucht, de structuur is stijf genoeg om zijn eigen gewicht te dragen en de stuwkracht van de propellers te weerstaan. Maar als de drone ergens tegenaan loopt, het wordt flexibel om de schok op te vangen en zo eventuele schade te minimaliseren. Dit onderzoek, die wordt uitgevoerd in het laboratorium voor intelligente systemen van Dario Floreano, is gepubliceerd in Wetenschap Robotica .
Sandwichstructuur
De veerkracht van de drone komt voort uit een unieke combinatie van stijve en elastische lagen. Een elastomeermembraan wordt uitgerekt en vervolgens ingeklemd tussen stijve platen. Als het systeem in rust is, de platen houden elkaar vast en geven de structuur zijn stijfheid. Maar als er voldoende kracht wordt uitgeoefend, de platen trekken uit elkaar en de structuur kan buigen.
"Als we een drone maken, we kunnen het specifieke mechanische eigenschappen geven, " zegt Stefano Mintchev, hoofdauteur van de studie. "Dit bevat, bijvoorbeeld, het bepalen van het moment waarop de constructie overschakelt van stijf naar flexibel." En omdat de drone elastische potentiële energie opbouwt wanneer deze wordt opgevouwen, het kan zich automatisch ontvouwen wanneer dit wordt geïnstrueerd.
Constructies die tegelijkertijd stijf en flexibel zijn, hebben tal van andere potentiële toepassingen, ook. Terwijl ze hun drone aan het ontwikkelen waren, de onderzoekers gebruikten dezelfde technologie om een soft-touch grijper te maken. De grijper wordt zachter zodra deze een bepaald drukniveau bereikt, zodat het object dat hij oppakt niet breekt. Dit betekent ook dat hij geen lading kan opnemen die zijn capaciteit overschrijdt.

Stefano Mintchev en zijn drone, dat flexibel genoeg is om schokken op te vangen zonder te breken voordat het terugkeert naar zijn oorspronkelijke vorm. Krediet:Alain Herzog / EPFL
"De huidige trend in robotica is om zachtere robots te maken die zich kunnen aanpassen aan een bepaalde functie en veilig naast mensen kunnen werken. Maar sommige toepassingen vereisen ook een zekere mate van stijfheid, " zegt Floreano. "Met ons systeem, we hebben laten zien dat je de juiste balans tussen beide kunt vinden."
-
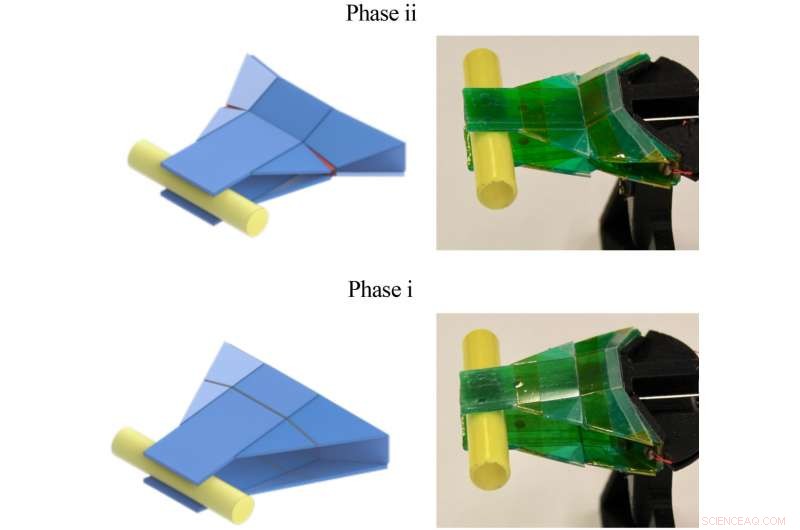
De ingenieurs pasten hun origamitechniek toe op grijpers die zachter worden om zich aan te passen aan het object dat voorhanden is. Krediet:Mintchev et al., Wetenschap. Robot . 3, eaau0275 (2018)
-
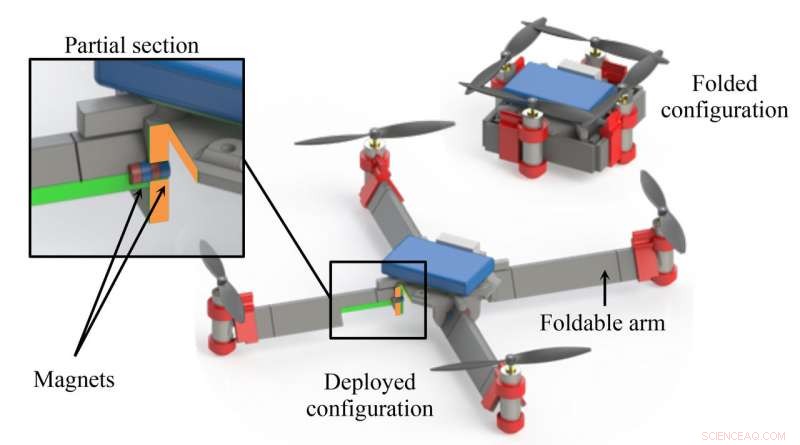
De crashbestendige quadcopter-drone met origami "armen" die tegelijkertijd stijf en zacht zijn. Krediet:Mintchev et al., Wetenschap. Robot . 3, eaau0275 (2018)
 In kaart brengen van het energietransportmechanisme van chalcogenideperovskiet voor gebruik van zonne-energie
In kaart brengen van het energietransportmechanisme van chalcogenideperovskiet voor gebruik van zonne-energie- SwissFEL maakt eiwitstructuren zichtbaar
- Meten van kleine krachten die tot grote effecten leiden
- Periodiek systeem ontdekt in St. Andrews erkend als oudste ter wereld
- Hoe een natriumchlorideoplossing te maken
- Wildvuur steekt huizen in woestijnstadje Zuid-Californië in brand
- Vernietigt de opwarming van de aarde de Mount Everest?
- Heeft Pluto stormen?
- Ambitieuze klimaatinspanningen van de EU kunnen de uitstoot in de rest van de wereld doen toenemen
- IJzerchemie is van belang voor de opname van koolstof in de oceaan
Hoofdlijnen
- Nieuwe functie in genregulerend eiwit ontdekt
- Hoe maak je een 3D-model van het spierstelsel voor een wetenschapsklasse
- Virtual reality voor bacteriën
- 10, 000 jaar oud DNA bewijst wanneer vissen meren koloniseerden
- Niveaus van celorganisatie
- De meest voorkomende organische moleculen in cellen
- Lijst met celorganellen en hun functies
- Biosfeer: definitie, hulpbronnen, cycli, feiten en voorbeelden
- Genontdekking kan wereldwijde tarwe-epidemie stoppen
- Evoluerende spraak en AI als venster op geestelijke gezondheid

- Ericsson-aandelen vliegen omhoog terwijl Zweedse telecomgigant verliezen dekt

- Bayer zet door met integratie van Monsanto terwijl aandelen lijden

- Wat dacht je van een smartphone met dubbele camera en een prijskaartje van $ 109? Bedankt, Samsung.

- Geavanceerde biobrandstoffen kunnen uiterst efficiënt worden geproduceerd


 The Different Sinds of Missouri Stone Used for Flint Knapping
The Different Sinds of Missouri Stone Used for Flint Knapping - Quantumtransitie zorgt ervoor dat elektronen zich gedragen alsof ze geen spin hebben
- Een manier om methaan onder milde omstandigheden direct om te zetten in methanol of azijnzuur
- Google Assistent voegt meer talen toe in wereldwijde push
- Na jaren lang wachten, Israëli's aan boord van nieuwe snelle trein
- Sugar van Water
- NASA telt record regen in Australië op
- SPT-CL J2106-5844 is de meest massieve cluster van sterrenstelsels met een hoge roodverschuiving, studie vondsten
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | German | Dutch | Danish | Norway | Swedish |

-
Wetenschap © https://nl.scienceaq.com
