Wetenschap
De volgende generatie robotkakkerlak kan onderwateromgevingen verkennen
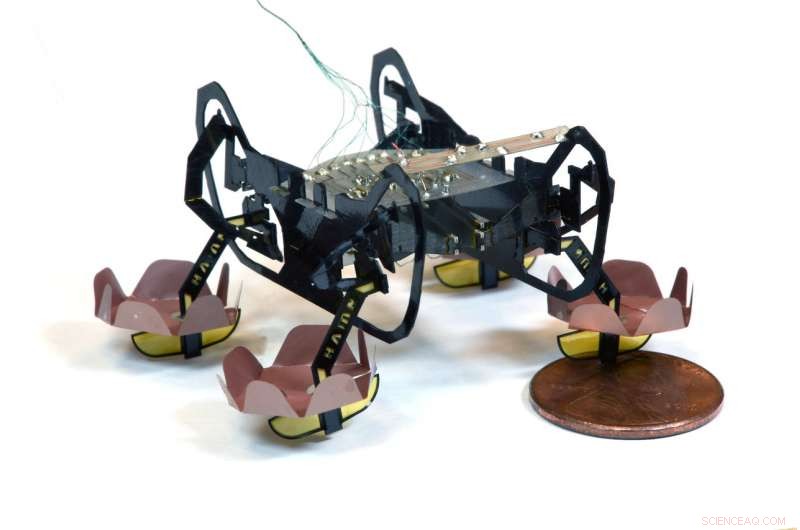
De volgende generatie van Harvard's Ambulatory Microrobot (HAMR) kan op het land lopen, zwemmen op het wateroppervlak, en onder water lopen, het openen van nieuwe omgevingen voor deze kleine bot om te verkennen. Krediet:Yufeng Chen, Neel Doshi, en Benjamin Goldberg/Harvard University
In de natuur, kakkerlakken kunnen tot 30 minuten onder water overleven. Nutsvoorzieningen, een robotkakkerlak kan het nog beter. Ambulante microrobot van Harvard, bekend als HAMR, over land kan lopen, zwemmen op het wateroppervlak, en loop zo lang als nodig onder water, het openen van nieuwe omgevingen voor deze kleine bot om te verkennen.
Deze volgende generatie HAMR maakt gebruik van multifunctionele voetzolen die afhankelijk zijn van oppervlaktespanning en door oppervlaktespanning veroorzaakt drijfvermogen wanneer HAMR moet zwemmen, maar die ook een spanning kunnen toepassen om het wateroppervlak te breken wanneer HAMR moet zinken. Dit proces heet electrowetting, dat is de vermindering van de contacthoek tussen een materiaal en het wateroppervlak onder een aangelegde spanning. Deze verandering van contacthoek maakt het gemakkelijker voor objecten om het wateroppervlak te breken.
Door over het wateroppervlak te bewegen, kan een microrobot ondergedompelde obstakels ontwijken en wordt de weerstand verminderd. Met behulp van vier paar asymmetrische flappen en speciaal ontworpen zwemgangen, HAMR robo-peddels op het wateroppervlak om te zwemmen. Door gebruik te maken van de onstabiele interactie tussen de passieve flappen van de robot en het omringende water, de robot genereert zwemgangen die vergelijkbaar zijn met die van een duikkever. Hierdoor kan de robot effectief vooruit zwemmen en draaien.
"Dit onderzoek toont aan dat microrobotica kleinschalige fysica - in dit geval oppervlaktespanning - kan gebruiken om functies en mogelijkheden uit te voeren die een uitdaging zijn voor grotere robots, " zei Kevin Chen, een postdoctoraal onderzoeker aan de Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) en eerste auteur van het artikel.

De multifunctionele voetzolen van HAMR zijn afhankelijk van oppervlaktespanning en door oppervlaktespanning veroorzaakt drijfvermogen wanneer HAMR moet zwemmen, maar kunnen ook een spanning aanbrengen om het wateroppervlak te breken wanneer HAMR moet zinken. Krediet:Yufeng Chen, Neel Doshi, en Benjamin Goldberg/Harvard University
Het meest recente onderzoek is gepubliceerd in het tijdschrift Natuurcommunicatie .
"De grootte van HAMR is de sleutel tot zijn prestaties, " zei Neel Doshi, afgestudeerde student bij SEAS en co-auteur van het papier. "Als het veel groter was, het zou een uitdaging zijn om de robot met oppervlaktespanning te ondersteunen en als het veel kleiner zou zijn, de robot kan mogelijk niet genoeg kracht genereren om hem te breken."
HAMR weegt 1,65 gram (ongeveer evenveel als een grote paperclip), kan 1,44 gram extra laadvermogen dragen zonder te zinken en kan zijn benen peddelen met een frequentie tot 10 Hz. Het is gecoat in Paryleen om te voorkomen dat het onder water kortsluit.
Eenmaal onder het wateroppervlak, HAMR gebruikt dezelfde manier van lopen als op het droge en is net zo mobiel. Om terug te keren naar het droge staat HAMR voor een enorme uitdaging vanuit het water. Een wateroppervlaktespanningskracht die tweemaal het gewicht van de robot is, drukt op de robot, en bovendien veroorzaakt het geïnduceerde koppel een dramatische toename van wrijving op de achterpoten van de robot. De onderzoekers verstevigden de transmissie van de robot en installeerden zachte kussens op de voorpoten van de robot om het laadvermogen te vergroten en de wrijving tijdens het klimmen te herverdelen. Eindelijk, een bescheiden helling oplopen, de robot kan uit het ruim van het water breken.
"Deze robot illustreert mooi enkele van de uitdagingen en kansen met kleinschalige robots, " zei senior auteur Robert Wood, Charles River Professor of Engineering and Applied Sciences bij SEAS en kernfaculteitslid van het Harvard Wyss Institute for Biologically Inspired Engineering. "Krimpen biedt kansen voor meer mobiliteit - zoals lopen op het wateroppervlak - maar ook uitdagingen, omdat de krachten die we op grotere schaal als vanzelfsprekend beschouwen, kunnen gaan domineren ter grootte van een insect."
Volgende, de onderzoekers hopen de voortbeweging van HAMR verder te verbeteren en een manier te vinden om zonder helling aan land terug te keren, misschien met op gekko geïnspireerde lijmen of impulsieve springmechanismen.
 Een gereedschapskist voor het maken van nieuwe medicijnen
Een gereedschapskist voor het maken van nieuwe medicijnen- Nauwkeurige deuteratie met zwaar water
- Automatisch experimenten sturen naar wetenschappelijke ontdekkingen
- Depressie, zwaarlijvigheid, chronische pijn kan worden behandeld door zich op hetzelfde belangrijke eiwit te richten
- Nieuw apparaat kan littekens bij cosmetische chirurgie helpen verminderen
- Soorten pauwen
- Studie onthult tienjarige variatie in relatie tussen Oost-Aziatische zomermoesson en El Nino
- Redactioneel:SoCal verliest zijn strijd tegen smog. In 2021 moet het tij keren
- De hittegolf in Europa houdt op nu de reischaos nieuwe pijn veroorzaakt
- Kan een onderwater-soundtrack koraalriffen echt weer tot leven brengen?
Hoofdlijnen
- Soorten bacteriën in het bloed
- Wat is de rol van glucose in het lichaam?
- Walviskarkas opgegraven van Australisch strand vanwege angst voor haaien
- The Krebs Cycle Made Easy
- Welke soorten cellen en organismen ondergaan mitose en meiose?
- Wat breekt een dubbele DNA-helix uiteen?
- De chemische samenstelling van uitgeademde lucht uit menselijke longen
- Hoe te voorkomen dat de nederige egel voor altijd uit de Britse tuinen en het platteland verdwijnt?
- Nieuwe analyse plaatst Hobbit op onverwachte ledemaat van de menselijke stamboom
- Nationale staking brengt België tot stilstand

- Tesla benoemt onafhankelijke bestuursleden in SEC-schikking (update)

- Nog steeds bovenaan:Cyber Monday-verkopen op schema om record te bereiken

- Elon Musks SpaceX gaat $ 500 miljoen ophalen:rapport

- Crisisinformatica-expert geeft drie tips om verkeerde informatie tijdens COVID-19 te voorkomen


 Hoe oplosbaarheid te berekenen van KSP
Hoe oplosbaarheid te berekenen van KSP - Slim water kan helpen bij het terugwinnen van olie
- Hoe leven op Mars te detecteren
- Appel, Samsung, Google ontvangt brief van wetgevers om gegevens van apps voor het bijhouden van perioden te beschermen
- Oude sterren werpen licht op de overeenkomsten van de aarde met andere planeten
- Luchthaven Frankfurt werkt aan vliegende taxi's
- Vergelijking van continentale hydrologische modellen helpt het waterbeheer te verbeteren
- Een geïntegreerde beoordeling van vaatplantensoorten in Amerika
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Norway | Spanish |

-
Wetenschap © https://nl.scienceaq.com
