Wetenschap
Onderzoek naar de dynamiek en FNTSM-besturing van ruimtevaartuigen met een filmopname-pocketsysteem
Door de aanzienlijke toename van de ruimtelanceringsactiviteiten is de afgelopen jaren het aantal buiten de baan geraakte ruimtevaartuigen sterk gestegen, wat een ernstige impact heeft op zowel actieve ruimtevaartuigen als toekomstige ruimtevaartactiviteiten. Traditionele systemen voor het opvangen van touwnetten, die dienen als technologie voor het actief uit de baan halen van ruimtevaartuigen, bieden een enorm potentieel bij het verminderen en opruimen van ruimteschroot.
Touwsystemen worden echter geconfronteerd met uitdagingen zoals problemen bij het behouden van hun vorm gedurende langere perioden, de gevoeligheid voor zelfverstrengeling, energieverliezen en een verkleining van het effectieve vanggebied. Dunne films kunnen daarentegen langs reguliere vormen worden gevouwen en ontvouwen, wat een grotere flexibiliteit en betrouwbaarheid biedt in vergelijking met kettingen. Ze komen naar voren als een effectieve oplossing voor het verstrengelingsprobleem en vormen een veelbelovende methode voor het beperken en verwijderen van ruimteschroot.
In een overzichtsartikel dat onlangs is gepubliceerd in Space:Science &Technology heeft het team van professor Wei Cheng aan het Harbin Institute of Technology, in samenwerking met onderzoekers van het Beijing Institute of Control Engineering en de Benha University, een pocketsysteem voor het vastleggen van dunne films ontworpen.
De flexibele structuur van dit systeem is echter gevoelig voor aanzienlijke vervormingen en trillingen tijdens beweging, wat resulteert in aanzienlijke interferentie met de operaties van ruimtevaartuigen. Om deze verstoringen kwantitatief te analyseren, richt deze studie zich op de dynamische modellering en standcontrole van het dunnefilm-pocket-opnamesysteem.
Het onderzoek omvat de ontwikkeling van een snelle niet-singuliere terminal slide mode controller (FNTSM) en een vaste tijddilatatiewaarnemer (FxESO) geïntegreerd in een attitude-tracking-controlewet. De effectiviteit van de controller wordt gevalideerd door de oprichting van een virtueel prototype. Dit onderzoek biedt theoretische ondersteuning voor de toekomstige toepassing van het systeem in een baan om de aarde.
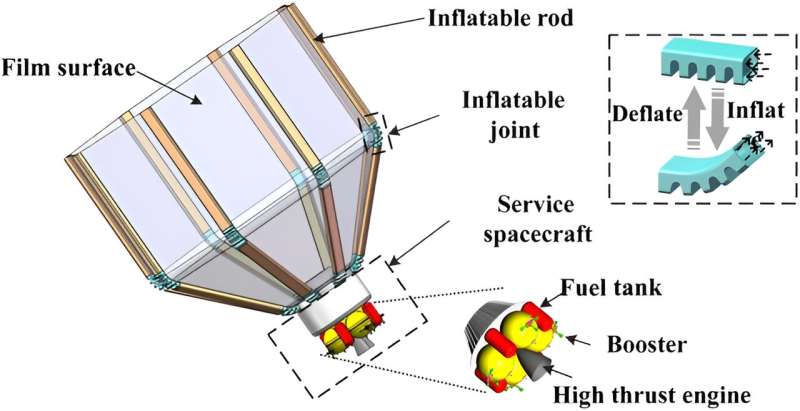
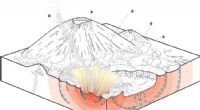
Stel eerst het model van het capture pocket-systeem vast. Door gebruik te maken van een grote flexibele membraanstructuur, ondersteund door opblaasbare staven, vormt het bovenste deel een achthoekig prisma, dat een grote omhulling biedt voor het vangmechanisme, terwijl het onderste deel een cilindrische vorm aanneemt.
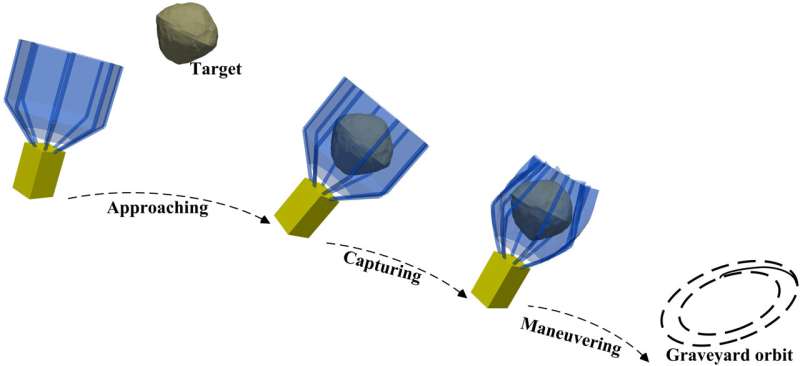
Het in- en uitklappen van het systeem wordt bereikt door het opblazen en leeglopen aan te passen met behulp van opblaasbare flexibele verbindingen. Het werkproces van het systeem verloopt hoofdzakelijk in 3 fasen. Ten eerste wordt het ruimtevaartuigsysteem aangedreven door de motor met hoge stuwkracht om het veroverde doel te naderen. Vervolgens worden opblaasbare flexibele gewrichten opgeblazen om het doel te omhullen. Ten slotte manoeuvreert het dienstruimtevaartuig actief om het gevangengenomen doel in de baan van het kerkhof te slepen.
Gebruik vervolgens de Absolute Nodal Coördinaat Formulering (ANCF) om het dynamische model van het dunne-film-pocket-vangsysteem vast te stellen. Gebruik ANCF-elementen van hoge orde met 8 knooppunten om de beweging van het filmoppervlak te beschrijven, waarbij de globale positievector wordt weergegeven via interpolatiepolynomen Φi (xi , yi ).
Beschrijf de rek van materiële punten met behulp van de Green-Lagrange rektensor en vervang deze door de globale positievectorgradiëntensor J ik om de bewegingsvergelijkingen van het element af te leiden. Gebruik het principe van virtuele arbeid om de kinematische vergelijkingen van het element af te leiden. Introduceer bovendien de controller u , hoeksnelheid ω( ω) , en eenheidsquaternion q .
Leid de afgeleiden af van de standvolgfouten, inclusief de hoeksnelheidsfout ω e en houdingsrotatiematrix A qe . Ten slotte wordt rekening gehouden met de effecten van het traagheidsmoment J van het ruimtevaartuig R en externe verstoring d , leid de dynamische vergelijkingen van het ruimtevaartuig af.
-
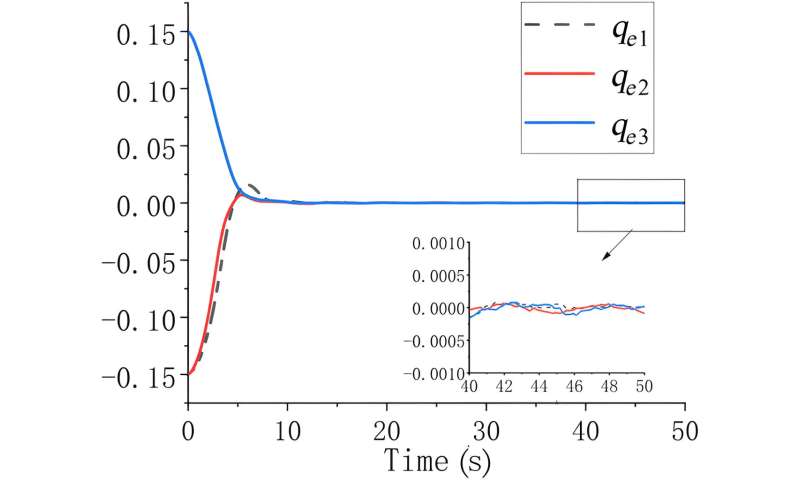
Houdingsfout qe rondingen. Credit:Ruimte:Wetenschap en technologie -
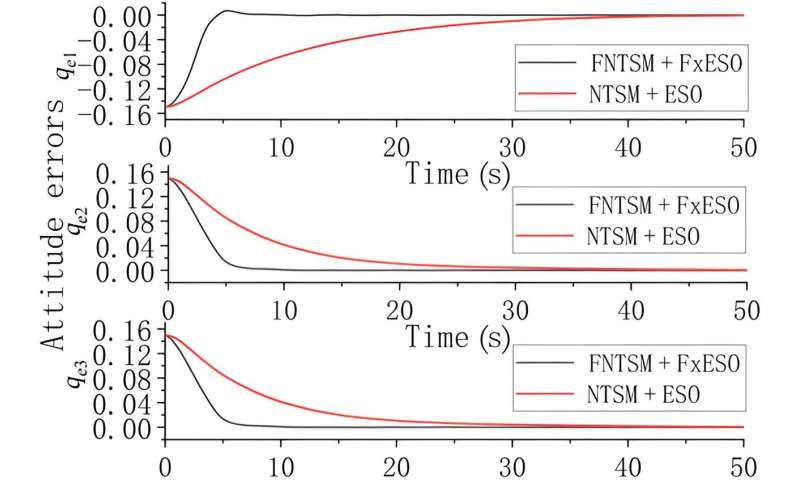
Vergelijking tussen de FNSMC + FxESO en NTSM + ESO. Credit:Ruimte:Wetenschap en technologie
Vervolgens heeft de auteur, voortbouwend op de niet-lineaire besturing van de glijdende modus, een Fast Terminal Sliding Mode (FTSM)-oppervlak ontworpen F . Om singulariteitsproblemen in FTSM te voorkomen, is een Fast Nonsingular Terminal Sliding Mode (FNTSM) oppervlak F ontworpen wanneer |q ei | <ψ .
De introductie van een Fixed-Time Extended State Observer (FxESO) omvat het ontwerpen van de dynamische vergelijkingen voor observatiefouten, waardoor het inschatten van onzekerheden mogelijk wordt. Ten slotte is een ruimtevaartuigcontroller, gebaseerd op FTNSM en FxESO, ontworpen om binnen een eindige tijd convergentie en stabiliteit te bereiken.
Vervolgens heeft de auteur een virtueel prototype opgesteld en numerieke simulatieanalyses uitgevoerd van de relevante dynamiek- en controletheorieën. Uit het onderzoek bleek dat het systeem zich na standmanoeuvres van ruimtevaartuigen geleidelijk stabiliseerde.
Er waren echter nog steeds trillingen in de flexibele staven, waardoor het membraan niet volledig kon worden strakgetrokken, wat resulteerde in voortdurende rimpels op het membraanoppervlak. Daarnaast werd de FNTSM + FxESO-controller vergeleken met de Nonsingular Terminal Sliding Mode (NTSM) + Expansion Observer (ESO)-controller, en werden de standfouten onder deze controller geanalyseerd.
De resultaten geven aan dat de FNTSM+FxESO-controller het ruimtevaartuig na 10 seconden in de gewenste houding brengt, wat ongeveer 25 seconden sneller is vergeleken met de NTSM+ESO-controller. Dit verbetert aanzienlijk de convergentiesnelheid van de standfout van het systeem.
Bovendien kan deze controller trillingen met hoge amplitude effectief onderdrukken, waardoor de steady-state houdingsfout op de grootte van 10 -4 blijft . Dit demonstreert de hoge efficiëntie, precisie en stabiliteit van de voorgestelde controller.
Meer informatie: Zhuoran Huang et al., Dynamiek en FNTSM-controle van ruimtevaartuigen met een Film Capture Pocket-systeem, Ruimte:wetenschap en technologie (2023). DOI:10.34133/spatie.0079
Aangeboden door Beijing Institute of Technology Press Co., Ltd
 Nieuwe kristallijne ijsvorm:wetenschappers verhelderen kristalstructuur voor exotisch ijs XIX
Nieuwe kristallijne ijsvorm:wetenschappers verhelderen kristalstructuur voor exotisch ijs XIX- Nieuw voorgestelde strategie biedt slimme flexibele neurale elektrode met hoge efficiëntie
- Waar vindt zure regen plaats?
- Een coole chemische scheidingstechnologie
- Fysica van ladingstransport van een unieke klasse van geconjugeerde polymeren met stijve staven
- Zuidelijke droogte verdiept; 11 miljoen getroffen
- Injectiestrategieën zijn cruciaal voor geothermische projecten
- Oude overstromingen van de Beringstraat laten ons zien hoe ijskappen reageren op klimaatverandering
- Logging en het effect ervan op het ecosysteem
- Door de opwarming van de aarde zullen ecosystemen meer methaan produceren dan eerst werd voorspeld
Hoofdlijnen
- Onderzoekers bereiken een parallelle meting van meerdere waterparameters met één sensorchip
- Wat is het verschil in de cellen van een menselijke baby en een volwassen mens?
Nieuwe baby's zijn allebei erg op elkaar en lijken erg op volwassenen. De meeste celontwikkeling en -differentiatie vinden plaats voorafgaand aan de geboorte van een ba
- Bezuinigingen op het behoud brengen de Amazone-dieren in Brazilië in gevaar
- De locatie van Cilia en Flagella
- Watervlooien als kanaries in een kolenmijn bieden de sleutel tot het beheersen van chemische vervuiling
- Het vinden van het ritme van collectieve beweging van dieren:wetenschappers tonen aan dat wederkerigheid de sleutel is tot het aansturen van gecoördineerde bewegingen
- Welke organellen bevinden zich in een prokaryote cel?
- Handelen of niet handelen? De ivoren impasse doorbreken
- How Do Ions Cross the Lipid Bilayer of the Cell Membrane?
- Martian CSI onthult hoe asteroïde-inslagen stromend water creëerden onder de rode planeet
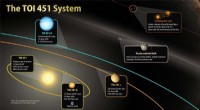
- TESS ontdekt nieuwe werelden in een rivier van jonge sterren
- Boeing-astronautencapsule maandenlang aan de grond door klepprobleem

- Marshelikopter maakt 4e vlucht, krijgt een extra maand vliegen
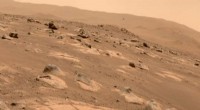
- Doorzettingsvermogen rovers SuperCam wetenschappelijk instrument levert eerste resultaten

 Wat gebeurt er met luchtdruk als u zich verplaatst van de troposfeer naar de thermosfeer?
Wat gebeurt er met luchtdruk als u zich verplaatst van de troposfeer naar de thermosfeer? - Hoe te controleren of kwantumchips correct rekenen?
- Gaia ziet sterren vliegen tussen sterrenstelsels
- Model biedt inzicht in hoe het leven zich blijft ontwikkelen
- Nanomotoren als sondes om de kankeromgeving te detecteren
- Hoe de optimale temperatuur voor een enzym te meten
- Verdwijnend zee-ijs verandert het hele ecosysteem van de Noordelijke IJszee
- Kunstmatige intelligentie bespaart water voor verenigingen van watergebruikers
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
