Wetenschap
Een virtuele wandelkaart voor de Jezero-krater, de landingsplaats van Mars 2020 Perseverance rover
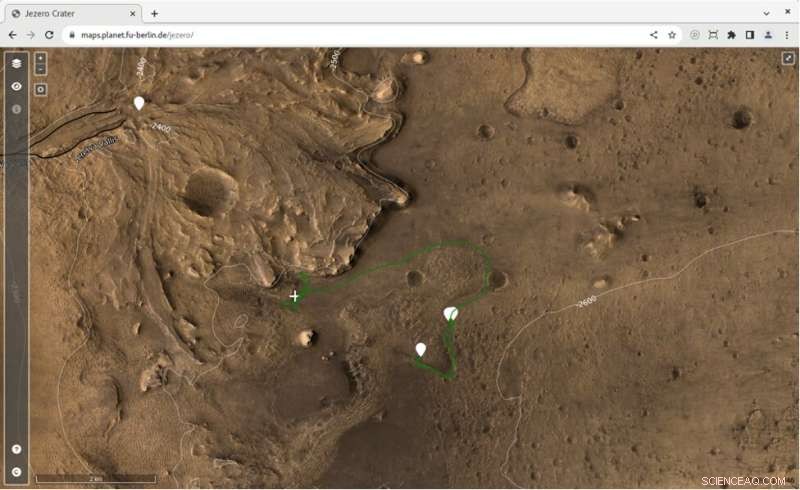
Kaartweergave met basisgegevensset, aanklikbare gezichtspunten zijn gemarkeerd als druppels. Krediet:HiRISE/CTX/HRSC
Toekomstige Mars-ontdekkingsreizigers kunnen nu een wandeling maken rond de landingsplaats van NASA's Mars 2020 Perseverance-rover met een interactieve kaart vol orbitale beelden, terreingegevens en synthetische en echte 3D-panorama's van de Jezero-krater en het omliggende gebied. De kaart, die toegankelijk is via een normale webbrowser, is vandaag gepresenteerd op het Europlanet Science Congress (EPSC) 2022 in Granada, Spanje, door Sebastian Walter van de Freie Universität Berlin.
"De kaart is het perfecte hulpmiddel voor het plannen van een toekomstig bezoek aan Mars, met een interactieve interface waar je kunt kiezen uit verschillende beschikbare basisdatasets. Sommige hellingen zijn behoorlijk steil, dus pas op voor die als je te veel zuurstof wilt vermijden consumptie!" zei Sebastian Walter.
"Om een echt gevoel te krijgen van wat je kunt verwachten op je toekomstige Mars-reis, kun je op een van de waypoint-markeringssymbolen klikken om een 3D-weergave op volledig scherm te openen of, als je een Virtual Reality-configuratie hebt, om een volledig meeslepende omgeving te betreden. Je kunt zelfs naar de geluiden van de rover luisteren als je dichtbij staat, maar raak hem alsjeblieft niet aan, anders zou je de sondes besmetten."
Met de kaart kunnen virtuele wandelaars in- en uitzoomen en snel door scènes schuiven, zodat ze het landschap van grote schaal tot centimeter-detail kunnen verkennen. Sommige van de 360°-panorama's die met de waypoints zijn geïntegreerd, zijn synthetisch weergegeven op basis van orbitale beeldgegevens.
-
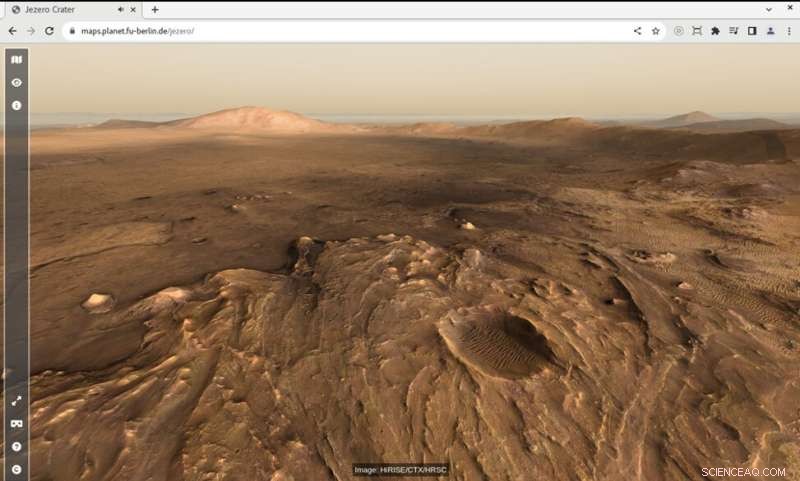
Virtueel zicht vanaf de top van de westelijke delta in de krater. Krediet:HiRISE/CTX/HRSC
-
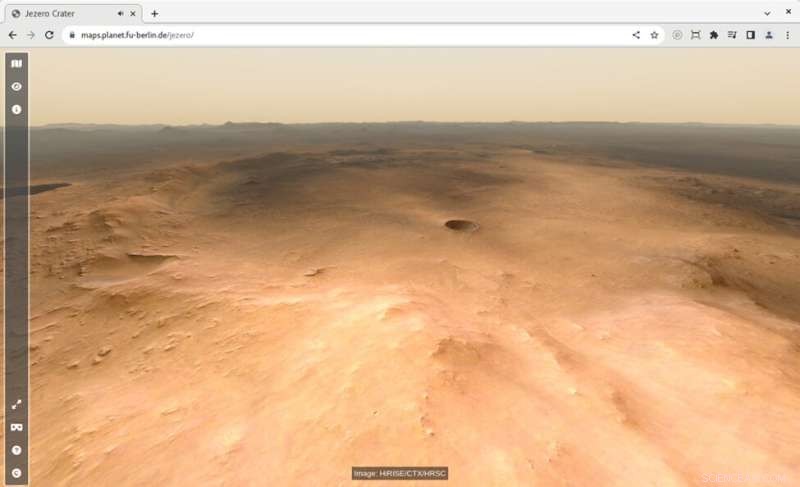
Virtueel zicht vanaf de top van Jezero Mons in de krater. Krediet:HiRISE/CTX/HRSC
Anderen zijn echte panorama's die aan elkaar zijn genaaid van een veelvoud aan afzonderlijke afbeeldingen die zijn gemaakt door het Mastcam-Z-camera-instrument aan boord van de Mars 2020 Rover Perseverance, die zijn geleverd door de Universiteit van Arizona. De geluiden zijn opgenomen door het SuperCam-instrument tijdens diezelfde rover-missie.
De basislaag van de kaart is een samengevoegde dataset die is afgeleid van drie verschillende instrumenten die momenteel in een baan om Mars draaien:de HRSC op Mars Express en de instrumenten Context Camera (CTX) en High Resolution Imaging Science Experiment (HiRISE) op Mars Reconnaissance Orbiter (MRO). De HiRISE-gegevens zijn aangeleverd door het Terrain Relative Navigation (TRN)-team van het Jet Propulsion Laboratory (JPL).
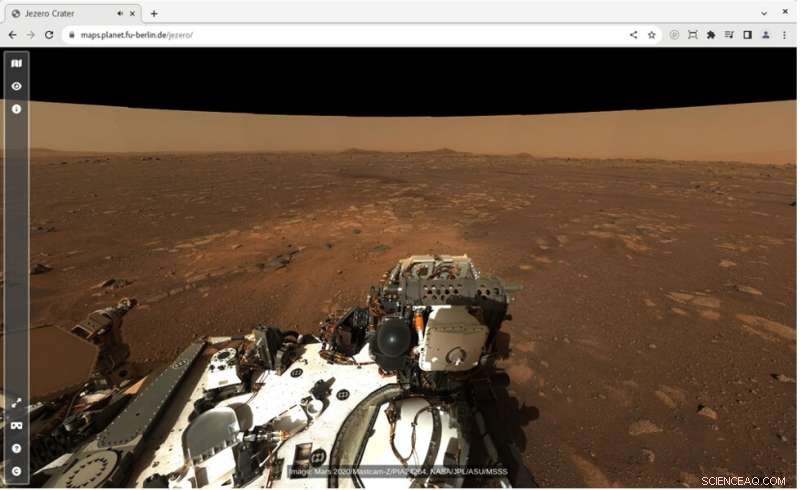
MastcamZ panoramamozaïek vanaf de landingsplaats Octavia E. Butler. Krediet:Mars 2020/Mastcam-Z/PIA24264, NASA/JPL/ASU/MSSS
De Jezero-kaart bouwt voort op het dataportaal van het High Resolution Stereo Camera (HRSC)-instrument van ESA's Mars Express-missie, dat tools biedt om grote hoeveelheden Mars-afbeeldingen en terreingegevens in een online omgeving te visualiseren en te verspreiden.
"Aanvankelijk hebben we de Jezero-kaart gemaakt als een outreach-toepassing als aanvulling op de HRSC Mapserver-tool, die professionele wetenschappers ondersteunt bij het verkennen van het oppervlak van Mars", zegt Sebastian Walter. "Maar naarmate de rover steeds meer afbeeldingsgegevens met een hoge resolutie en zelfs audio-opnames retourneert, blijkt het de perfecte tool te zijn voor meeslepende visualisatie van die gegevens in een wetenschappelijke context op zich." + Verder verkennen
Prachtige duinen op Mars, gebeeldhouwd door wervelende winden
 Voor CRISPR, het tweaken van DNA-fragmenten voordat ze worden ingevoegd, levert de hoogste efficiëntie tot nu toe op
Voor CRISPR, het tweaken van DNA-fragmenten voordat ze worden ingevoegd, levert de hoogste efficiëntie tot nu toe op- Een concrete stap in de richting van nul CO2-uitstoot bij de cementproductie
- Een venster voor traploos ladingtransport in organische halfgeleiders
- Wetenschappers gebruiken trechtervisie om goedkope en efficiënte zonne-energie te pionieren
- Negatieve gezondheidseffecten van zure regen op mensen
- Miljoenen vonken:het weer verhoogt het brandgevaar in Australië
- Het mengen van meren – de macht van het micro-organisme
- Hoe zwemmen pinguïns?
De meeste soorten pinguïns zwemmen samen, in kleine of grote groepen, op zoek naar voedsel. Sommige pinguïns brengen bijna driekwart van hun leven op het water door. Sommige soorten pinguïns, zoals de Rockhopper en Macaroni, g
- Hoe beïnvloedt invallende zonnestraling stedelijke canyons?
- Klimaatverandering bedreigt ijsgrotten in Oostenrijk
Hoofdlijnen
- Halve werelden vogels in verval, soorten die steeds sneller uitsterven
- Microbiologie vs. Biochemie
- Wat zijn de speciale dingen die gebeuren wanneer cellen worden gesplitst?
- Waarom heeft een regenworm een gesloten bloedsomloop?
- Genmutatie: definitie, oorzaken, typen, voorbeelden
- Chimpansees die het huis verlaten stellen het ouderschap uit
- Masterchef-techniek blijkt levensreddend te zijn voor bedreigde zeeschildpadeieren
- Soorten sporenvormende bacteriën
- Wat zijn de voordelen van eiwitten die worden geproduceerd door middel van recombinante DNA-technologie?
- Chinese vrijwilligers komen uit virtuele maanbasis

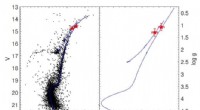
- Nieuwe techniek bepaalt nauwkeuriger de leeftijd van sterren
- Studie onderzoekt chemische eigenschappen van bolhoop NGC 1261
- Turbulente tijden onthuld op Asteroid 4 Vesta

- Kleinschalige magnetische luifels kunnen een wereldwijd verbindende laag vormen in de fotosfeer van de zon

 Onderzoekers ontwikkelen flexibele, rekbare fotonische apparaten
Onderzoekers ontwikkelen flexibele, rekbare fotonische apparaten- Sterke aardbeving bij Filipijnen zorgt voor paniek tsunami-waarschuwing (update)
- Hoe kunnen vogels zich reproduceren?
- Nieuwe nanogel voor medicijnafgifte
- Gebruik van bomen
- Virtuele boerderijwebsite biedt een overvloed aan informatie over duurzaamheid van zuivel
- Portland State University publiceert landelijke richtlijnen voor aandelenprogramma's voor fietsaandelen
- Volgende generatie elektronische bewaking van voorwaardelijk vrijgelatenen in ontwikkeling
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
