Wetenschap
Adaptieve micro-elektronica hervormt onafhankelijk en detecteert voor het eerst de omgeving
Dankzij sensoren en kunstmatige spieren op microschaal, toekomstige micro-elektronica zal in staat zijn om complexe vormen aan te nemen en bioneurale interfaces te creëren met gevoelig biologisch weefsel zonder schade te veroorzaken. Credit:IFW Dresden/Chemnitz University of Technology
Flexibele en adaptieve micro-elektronica wordt beschouwd als een innovatiemotor voor nieuwe en effectievere biomedische toepassingen. Waaronder, bijvoorbeeld, de behandeling van beschadigde zenuwbanen, chronische pijn, of de controle van kunstmatige ledematen. Om dit te laten werken, nauw contact tussen elektronica en zenuwweefsel is essentieel voor een effectieve elektrische en mechanische koppeling. In aanvulling, potentiële toepassingen komen voort uit de productie van kleine en flexibele chirurgische instrumenten.
Een internationaal team onder leiding van Prof. Dr. Oliver G. Schmidt, hoofd van het Institute for Integrative Nanosciences aan het Leibniz Institute for Solid State and Materials Research (IFW) Dresden en houder van het Professorship of Materials for Nanoelectronics aan de Chemnitz University of Technology en initiatiefnemer van het Centre for Materials, Architecturen en integratie van nanomembranen (MAIN), evenals Boris Rivkin, een doctoraat student in de groep van prof. Schmidt, heeft nu voor het eerst aangetoond dat dergelijke adaptieve micro-elektronica zich op een gecontroleerde manier kan positioneren, biologisch weefsel manipuleren, en reageren op hun omgeving door sensorsignalen te analyseren. De resultaten, met Rivkin als eerste auteur, zijn verschenen in het tijdschrift Geavanceerde intelligente systemen . Verschillende eigenschappen voor dynamische processen voor het eerst gecombineerd in adaptieve micro-elektronica
Tot nu, het is voor micro-elektronische structuren niet mogelijk geweest om hun omgeving zowel te voelen als zich aan te passen. Hoewel er structuren zijn met een reksensor die hun eigen vorm bewaken, micro-elektronica met magnetische sensoren die zich oriënteren in de ruimte, of apparaten waarvan de beweging kan worden gecontroleerd door elektroactieve polymeerstructuren, een combinatie van deze eigenschappen voor toepassing in een dynamisch veranderend organisme op micrometerschaal, d.w.z. ruim onder een millimeter, is tot nu toe niet gerapporteerd.Adaptieve en intelligente micro-elektronica
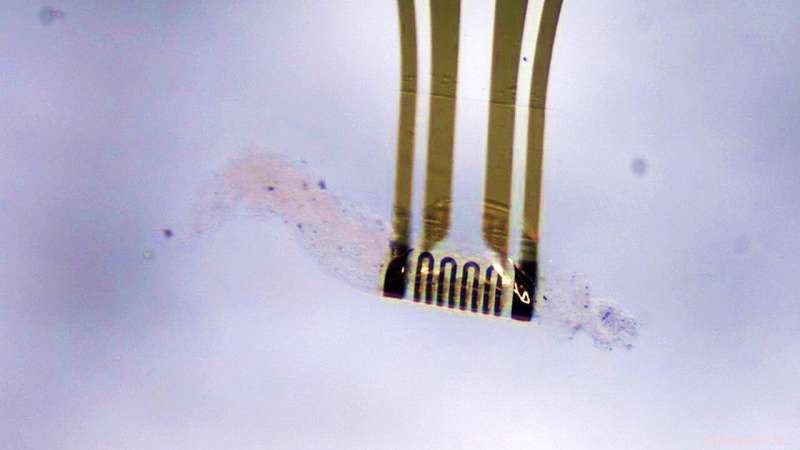
De kern van deze toepassingen is een polymeerfilm, slechts 0,5 mm breed en 0,35 mm lang, die fungeert als een drager voor de micro-elektronische componenten. Ter vergelijking, een stuk van 1 cent heeft een diameter van ongeveer 16 mm. In hun publicatie, het team van de Chemnitz University of Technology en de Leibniz IFW in Dresden presenteert nu adaptieve en intelligente micro-elektronica die microscopisch kleine kunstmatige spieren gebruikt om dynamische omgevingen te hervormen en aan te passen dankzij de feedback van geschikte sensoren.
De sensorsignalen worden via elektrische verbindingen naar een microcontroller geleid, waar ze worden geëvalueerd en gebruikt om controlesignalen voor de kunstmatige spieren te genereren. Hierdoor kunnen deze miniatuurgereedschappen zich aanpassen aan complexe en onvoorspelbare anatomische vormen. Bijvoorbeeld, zenuwbundels hebben altijd verschillende maten. Adaptieve micro-elektronica kan deze zenuwbundels voorzichtig omsluiten om een geschikte bioneurale interface tot stand te brengen.
Essentieel hiervoor is de integratie van vorm- of positiesensoren in combinatie met microactuatoren. Adaptieve micro-elektronica wordt daarom vervaardigd in een zogenaamd 'monolithic wafer-scale process'. 'Wafers' zijn vlakke substraten van silicium of glas waarop de schakelingen worden vervaardigd. Dankzij de monolithische productie kunnen veel componenten tegelijkertijd parallel op één substraat worden vervaardigd. Dit maakt een snelle en tegelijkertijd kosteneffectievere productie mogelijk. Kunstmatige spieren genereren beweging - gebruik in organische omgeving mogelijk
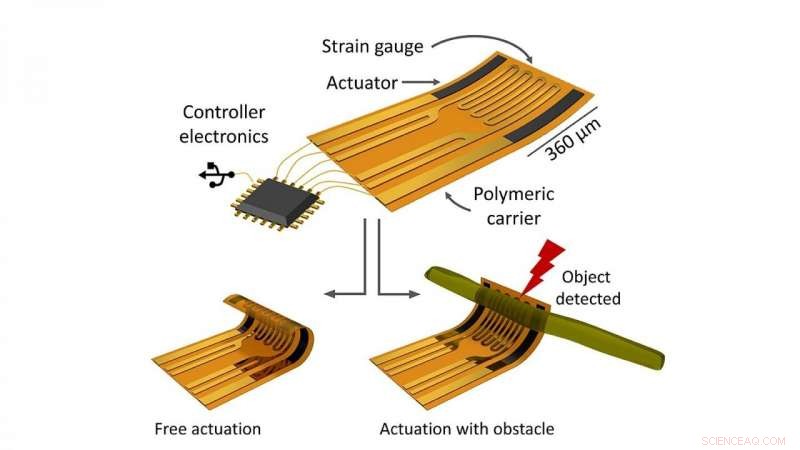
De door het onderzoeksteam uit Chemnitz en Dresden ontwikkelde polymeerfilm is slechts 0,5 mm breed en 0,35 mm lang. Het fungeert als drager voor de micro-elektronische componenten en is uitgerust met kunstmatige spieren en sensoren. Hierdoor kan hij zijn omgeving waarnemen, objecten herkennen, en aanpassen aan verschillende vormen. Credit:IFW Dresden/Chemnitz University of Technology
De beweging en omvorming van adaptieve micro-elektronica wordt bereikt door middel van kunstmatige spieren, de zogenaamde 'actuatoren'. Deze genereren beweging door ionen uit te werpen of te absorberen en kunnen zo de polymeerfilm een nieuwe vorm geven.
Dit proces is gebaseerd op het gebruik van het polymeer polypyrrool (PPy). Het voordeel van deze methode is dat manipulatie van de vorm gericht kan worden uitgevoerd en met al een zeer lage elektrische voorspanning (minder dan één volt). Dat kunstspieren ook veilig zijn voor gebruik in biologische omgevingen is in het verleden al door andere groepen aangetoond. Dit omvatte het testen van de prestaties van de micromachines in verschillende omgevingen die relevant zijn voor medische toepassingen, inclusief hersenvocht, bloed, plasma, en urine.
Op weg naar nog complexere micro-elektronische robots in de toekomst
Het team uit Dresden en Chemnitz verwacht dat adaptieve en intelligente micro-elektronica op middellange termijn zal worden ontwikkeld tot complexe robotmicrosystemen. Boris Rivkin zegt:"De cruciale volgende stap is de overgang van de voorheen platte architectuur naar driedimensionale microrobots. Eerder werk heeft aangetoond hoe platte polymeerfilms kunnen worden omgevormd tot driedimensionale structuren door zelfgeorganiseerd vouwen of rollen. We zullen adaptieve elektronica aan dergelijke materialen toevoegen om systemen te ontwikkelen zoals robotmicrokatheters, kleine robotarmen, en kneedbare neurale implantaten die semi-autonoom werken volgens een digitale instructie."
Dr. Daniil Karnaushenko, groepsleider in het team van Prof. Oliver Schmidt, voegt toe, "Dergelijke complexe microrobots zullen een groot aantal individuele actuatoren en sensoren vereisen. Het is een uitdaging om elektronische componenten in een dergelijke dichtheid effectief te huisvesten en te gebruiken, omdat er meer elektrische verbindingen nodig zijn dan er ruimte beschikbaar is. Dit zal worden opgelost door complexe elektronische circuits die in de toekomst worden geïntegreerd in adaptieve micro-elektronica om de juiste instructies door te geven aan de juiste componenten."
Dit werk draagt ook bij aan het opkomende gebied van robotgeassisteerde chirurgie, die minder ingrijpende maar nauwkeurigere procedures mogelijk zouden kunnen maken. Slimme chirurgische instrumenten die betrouwbare feedback genereren over hun vorm en positie, kunnen onmisbaar worden bij de behandeling van kwetsbaar weefsel.
 Branden blijven razen door het leefgebied van een nieuw ontdekte Amazone-primaat
Branden blijven razen door het leefgebied van een nieuw ontdekte Amazone-primaat- Plants & Animals of Germany
- Een graslandecosysteemproject in een schoenendoos doen
- Microplastics en plastic additieven ontdekt in ascidians langs de kustlijn van Israël
- Onderzoekers creëren nieuwe instrumenten om de waterkwaliteit te monitoren, wateronzekerheid meten
Hoofdlijnen
- Effecten van mobiele telefoons op studenten
- Houden mannelijke vissen ze liever groot en kleurrijk?
- Overeenkomsten van de mitochondria en nucleus
- Wat is de meest logische volgorde van stappen voor het splitsen van vreemd DNA?
- Cel Life Functies
- Staan we op een kantelpunt met onkruidbestrijding?
- Insecten nemen drastisch af in Duitse natuurreservaten:studie
- Insecten kunnen mensen leren omgaan met tegenslag
- Een 3D-plantencel maken
- Een betere natuur:onderzoekers leren biologiegeheimen om taaie, veerkrachtige materialen

- Grafeen en kobalt voor het maken van nieuwe elektromagnetische apparaten

- Onderzoekers ontwikkelen nieuwe monolaagmaterialen voor sensoren voor chemische dampen
- Ultrahoge gevoeligheid grafeen-infrarooddetectoren voor beeldvorming en spectroscopie
- Een microlab op een chip detecteert bloedgroep binnen enkele minuten

 Porsche eerste Duitse autofabrikant die dieselmotoren verlaat
Porsche eerste Duitse autofabrikant die dieselmotoren verlaat- Tesla onderzoekt autobrand in Shanghai
- Chemische lusverbranding voor CO2-neutrale gasinstallaties
- Intensief beheer van gewassen en vee stimuleerde de economische ontwikkeling van La Bastidas
- Hoe weerradar de ongrijpbare ekstergans in de gaten kan houden
- Observeren van de ultrasnelle beweging van atomen en elektronen
- Lijst met gereedschappen en wapens van steen
- De aardbeving in Kaikoura kan ertoe leiden dat de modellen voor aardbevingsgevaar internationaal worden heroverwogen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
