Wetenschap
Magnetische microrobots gebruiken capillaire krachten om deeltjes op hun plaats te krijgen
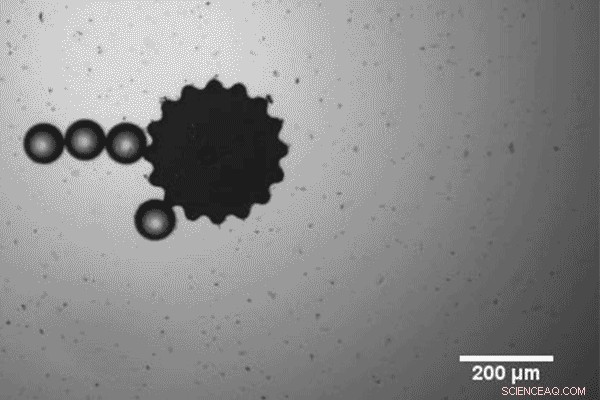
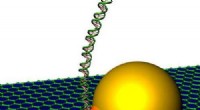
Getoond in 4x snelheid, een bloemvormige microrobot nadert plastic kralen, gebruikt capillaire krachten om ze aan een van de bloembladen te plakken, laat ze vervolgens op de gewenste locatie los door op hun plaats te draaien. Krediet:Penn Engineering
Op microscopische schaal, plukken, plaatsen, verzamelen, en het ordenen van objecten is een aanhoudende uitdaging. Vooruitgang in nanotechnologie betekent dat er steeds complexere dingen zijn die we willen bouwen op die afmetingen, maar hulpmiddelen om hun samenstellende delen te verplaatsen ontbreken.
Nieuw onderzoek van de School of Engineering and Applied Science laat zien hoe eenvoudig, microscopische robots, op afstand aangedreven door magnetische velden, kan capillaire krachten gebruiken om objecten te manipuleren die op een olie-water-interface drijven. Dit systeem werd gedemonstreerd in een studie gepubliceerd in het tijdschrift Technische Natuurkunde Brieven .
De studie werd geleid door Kathleen Stebe, Richer &Elizabeth Goodwin Professor in Penn Engineering's Department of Chemical and Biomolecular Engineering, en Tianyi Yao, een afgestudeerde student in haar lab. Nicolaas Chisholm, een postdoctoraal onderzoeker in het lab van Stebe, en Edward Steager, een onderzoekswetenschapper in het GRASP-lab van Penn Engineering droeg bij aan het onderzoek.
De microrobots in de studie van het Penn-team zijn dunne plakjes magneet, ongeveer een derde van een millimeter in diameter. Ondanks dat er geen bewegende delen of eigen sensoren zijn, de onderzoekers noemen ze robots vanwege hun vermogen om willekeurige objecten te kiezen en te plaatsen die nog kleiner zijn dan ze zijn.
Dat vermogen is een functie van de gespecialiseerde omgeving waarin deze microrobots werken:op het grensvlak tussen twee vloeistoffen. In dit onderzoek, het grensvlak is tussen water en hexadecaan, een gewone olie. Eenmaal daar, de robots vervormen de vorm van die interface, in wezen zichzelf omgeven met een onzichtbaar "krachtveld" van capillaire interacties.
Dezelfde capillaire krachten die water van de wortels van een boom naar de bladeren trekken, worden hier gebruikt om plastic microdeeltjes in contact te brengen met de robot, of andere deeltjes die al aan de randen vastzitten.
"We hebben deze capillaire krachten eerder gebruikt om dingen samen te stellen, maar nu zijn de robots en de deeltjes veel lichter en een paar ordes van grootte kleiner in diameter, ' zegt Stebe. 'Als je naar de micronschaal gaat, het betekent dat een ander soort natuurkunde de vervormingen regeert. Het verzamelen en ordenen van objecten met een doorsnede van enkele tientallen microns is een hele prestatie, en niet iets dat we met de hand kunnen doen."
De studie toonde de fysica aan die de interacties tussen deze microrobots en de plastic deeltjes die ze moesten manipuleren, beheersen.
"Vroeger, "Stebe zegt, "we namen statische objecten en maakten er vervormingen omheen, toonde vervolgens aan hoe deeltjes werden aangetrokken door 'hoge kromming'-gebieden van die vervormingen. Nutsvoorzieningen, in plaats van een statisch object, we hebben een magneet die dient als een mobiele vervormingsbron."
"Dit maakt de zaken ingewikkelder, " zegt Chisholm. "Terwijl de robot naar deeltjes toe beweegt, het creëert een stromingsveld dat de deeltjes wegduwt, dus nu is er een wisselwerking tussen hydrodynamische afstoting en capillaire aantrekking. De deeltjes volgen het energieminimum, wat zou kunnen betekenen dat je bergopwaarts gaat."
Met een vierkante robot, zagen de onderzoekers dat zodra ze deeltjes over de top van de vervorming kregen, ze werden sterk aangetrokken door de hoeken. Dit is een potentieel nuttige eigenschap, omdat de robots hun doelen vanuit een breed scala aan hoeken en oriëntaties kunnen naderen en toch met het deeltje op een voorspelbare locatie kunnen eindigen.
"We hebben aangetoond dat wanneer je de vorm van de robot verandert, je verandert het type en de sterkte van de interacties, zegt Stebe. Scherpe hoeken houden de deeltjes vast als een grimmige dood, maar als we de hoeken verzachten, we kunnen de robots gewoon een draai geven om ze vrij te laten."
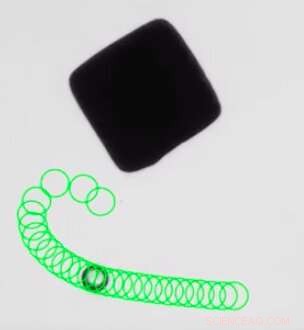
Deeltjes worden sterk aangetrokken door de hoeken van vierkante robots. De groene omtreklijn toont de baan die het deeltje aflegt als de robot nadert. Krediet:Universiteit van Pennsylvania
Naast een vierkant met zachte hoeken, experimenteerden de onderzoekers ook met een ronde robot, evenals een bloemvormige. Ze hadden allemaal het extra voordeel dat ze hun lading precies konden vrijgeven door op hun plaats te draaien, met de "bloemblaadjes" van de bloemvormige robot die de meest nauwkeurige controle bieden over de locatie van een vrachtdeeltje.
Eindelijk, het team demonstreerde een dockingstation. Bestaande uit een statisch stuk golvend plastic, het dockingstation bevindt zich deels boven en deels onder de interface. Deze opstelling zorgt voor een zeer voorspelbare reeks vervormingen waar het materiaal de interface kruist.
"We kunnen deze robots verplaatsen en dingen verzamelen, "Steager zegt, "echt ingewikkelde materialen opbouwen door de stukjes een voor een op te pakken en ze te dokken waar we willen."
Omdat de interacties tussen de robots en deeltjes niets te maken hebben met de materialen waaruit ze zijn gemaakt, een breed scala aan toepassingen is mogelijk.
"De deeltjes die we in deze studie manipuleren, hebben ongeveer de gemiddelde grootte van een menselijke cel of kleiner, "Jao zegt, "dus dit soort systeem kan toepassingen hebben op het gebied van eencellige biologie, met een magnetische microrobot die individuele cellen door verschillende stadia van een experiment beweegt."
"Deze deeltjes kunnen ook deel uitmaken van een sensorsysteem, " zegt hij. "Als je een robot en sensordeeltjes op een interface had, je zou die deeltjes kunnen verzamelen en het hele samenstel naar het doelgebied kunnen dragen met een extreem fijne mate van ruimtelijke controle. In dit scenario, er is een zeer lage concentratie sensordeeltjes nodig en ze kunnen na de test gemakkelijk worden teruggetrokken."
Toekomstig werk omvat het ontwikkelen van een grotere bibliotheek met vormen en gedragingen van microrobots voor het manipuleren van objecten in hun omgeving, evenals robuustere detectie- en controlesystemen die een grotere mate van autonomie voor de robots mogelijk zouden maken.
 Lijst met geleiders
Lijst met geleiders - Negatieve gezondheidseffecten van zure regen op mensen
- Synchrotron-straling werpt licht op het vormingsmechanisme van aromatische polyimide-precursor
- Chemici ontwikkelen nieuwe methode voor selectieve binding van eiwitten
- Licht pincet kan bewegen, smelten, en verstrooi mysterieuze biologische ijsbergen
- Het goede, de slechte en de algen:Salton Zeealgen als nieuwe brandstofbron en vervuilingsoplossing
- Europa bakt opnieuw in bijna recordtemperaturen
- Wereldwijde uitstoot van kooldioxide zal naar verwachting stijgen na drie stabiele jaren
- Kunnen we de regenwouden van de planeet opnieuw planten?
- Gevoeligere klimaten zijn meer variabele klimaten, uit onderzoek blijkt
Hoofdlijnen
- Meiosis 1: Stadia & belang in celdeling
- De productie van recombinante menselijke groeihormonen door recombinante DNA-technologie
- De primaire primaire productiviteit berekenen
- Drie mechanismen van genetische recombinatie in Prokaryotes
- Hoe gendoping werkt
- Tekenen kunnen helpen, kunnen geschiedenisliefhebbers helpen om meer buff te krijgen
- Wat is celcompartimentering en waarom gebeurt het?
- Waar is de kern gevonden in de cel en waarom?
- Wat is de relatie tussen stikstofbasen en de genetische code?
- Het land beveiligen met materiaal voor vingerafdrukken
- Onderzoekers laten zien hoe grafeen-metaal-interfaces elektronen beïnvloeden
- Onderzoekers creëren unieke grafeen-nanoporiën met optische antennes voor DNA-sequencing
- Wetenschappers overwinnen bottleneck bij het fabriceren van quantum dot-displays

- Zoete nanodeeltjes bedriegen de nieren


 Wetenschappers ontwikkelen luchtkwaliteitssensor die het leven van baby's en astmapatiënten kan redden
Wetenschappers ontwikkelen luchtkwaliteitssensor die het leven van baby's en astmapatiënten kan redden- Opinie:Het klimaat op aarde heeft onze moed nodig
- Het upcyclen van plastic flessen kan ze een nuttiger tweede leven geven
- Netwerkaanvallen detecteren en beperken met een meervoudige aanpak
- Naarmate meer ontwikkelingslanden de export van plastic afval afwijzen, rijke landen zoeken thuis oplossingen
- Chef van het wetenschappelijke panel van de VN roept op tot meer actie om de opwarming te beteugelen
- Servië woedend over plan Kroatië om Tesla op euromunten te zetten
- Brandweerlieden beschermen observatorium op de piek van Zuid-Californië
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Swedish | German | Dutch | Danish | Norway | Portuguese |

-
Wetenschap © https://nl.scienceaq.com
