Wetenschap
Hoe echte transformatoren werken
 Optimus Prime in tweebenige vorm, uit de film "The Transformers". Bekijk meer foto's van robots . Afbeelding © 2007 Dreamworks Pictures
Optimus Prime in tweebenige vorm, uit de film "The Transformers". Bekijk meer foto's van robots . Afbeelding © 2007 Dreamworks Pictures Zonder twijfel, het personeel van HowStuffWorks is bezorgd over de aankomende film "Transformers". We vragen ons niet alleen af of het goed zal zijn. We vragen ons af of we tijdens ons leven robots met de mogelijkheden van Transformers zullen zien. Hoewel Transformers op ware grootte een beetje onwaarschijnlijk - en onpraktisch - lijken, blijkt dat sommige bestaande robots veel gemeen hebben met Transformers. In dit artikel, we zullen onderzoeken hoe deze transformerende robots eruit zien, hoe ze werken en hoe ze lijken op Transformers zoals Optimus Prime.
We beginnen met een analyse van Prime zelf. Hij is enorm en indrukwekkend, maar zou hij ooit echt kunnen zijn? Er achter komen, we vroegen ingenieur Michael D. Belote wat er nodig zou zijn om een trekker-oplegger op ware grootte te bouwen die kan worden omgebouwd tot een tweevoetige robot. Met andere woorden, wat zou er nodig zijn om een levensgrote versie van Optimus Prime te maken?
Eerst, Prime moet een zijn zelf-herconfigurerende robot . Sommige zelfherconfigurerende robots, of robots die hun vorm kunnen veranderen om verschillende taken uit te voeren, bestaan vandaag. Echter, ze zijn heel anders dan Optimus Prime. Zoals Belote uitlegt:
Met zelf-herconfigureerbare robots, de ingenieur geeft er doorgaans de voorkeur aan om het individu te houden, mobiele modules klein, eenvoudig, goedkoop, en uitwisselbaar; in het geval van Optimus Prime, echter, we hebben te maken met een robot waarvan de afzonderlijke modules zo groot zijn als de cabine van een semi-vrachtwagen. Zelfs als het bouwen van dergelijke modules mogelijk zou zijn, de kosten zouden exorbitant zijn, en de buitengewone complexiteit zou het vrijwel onmogelijk maken om ooit alle systemen goed samen te laten werken.Als ingenieurs ontdekten hoe ze verwisselbare modules konden maken op de schaal van Optimus Prime, het kan nog steeds onmogelijk zijn om de kracht te leveren om ze te verplaatsen. In zijn voertuigvorm, Optimus Prime kan rijden op gewone dieselbrandstof. Maar lopen is veel minder efficiënt dan rollen op wielen. Om te kunnen lopen, Prime zou veel meer vermogen nodig hebben dan een dieselmotor zou kunnen leveren. Hier is de analyse van Belote van hoe om te gaan met de stroomvereisten van Prime:
Traditionele robots zijn gebouwd op een van de drie krachtbronnen:elektrisch, pneumatisch, of hydraulisch. Door de extreme gewichten die ermee gemoeid zijn, hydraulische kracht is de meest waarschijnlijke bron voor Prime, omdat hydraulische aandrijvingen zeer hoge vermogen-gewichtsverhoudingen bieden (grote vermogensafgifte voor kleine vermogensingangen).Dus door hydraulische kracht kan Prime lopen, maar het hydraulische systeem zelf zou andere problemen veroorzaken. "Er moet een tank of reservoir worden toegevoegd om de hydraulische vloeistof vast te houden, " zegt Belote, "hydraulische pompen zijn nodig; er moet een secundaire stroombron worden gebruikt om de pomp van stroom te voorzien; kleppen zijn nodig om aan de juiste drukken en stroomsnelheden te voldoen." In aanvulling, een hydraulisch aangedreven Prime zou moeten worden bekleed met leidingen om de hydraulische vloeistof te vervoeren. Deze pijpen, samen met Prime's brandstofleidingen en elektrische bedrading, tijdens de transformatie onbeschadigd of zelfs onaangeroerd zouden moeten blijven.
Na het overleven van de transformatie naar robotvorm, Prime zou dan als tweevoeter moeten lopen. Belote beschrijft wat er voor nodig is om dit te laten gebeuren:aangezien traditionele halffabrikaten vaak meer dan 30 ton wegen, het uiteindelijke gewicht van Prime zou gemakkelijk in het bereik van 35 tot 40 ton kunnen liggen. Vergelijk dit met 's werelds beste "lopende" robot, Honda's ASIMO-robot, die een totaal gewicht heeft van 119 pond en toch slechts ongeveer 40 minuten kan lopen (elektrisch aangedreven) en met een maximale snelheid van minder dan 2 mph. De gewichtsverhouding voor ASIMO is 2,3 lbs per inch, vergeleken met de gewichtsverhouding van Prime, die waarschijnlijk meer dan 75 tot 80 lbs per inch zou bedragen - een dertigvoudige toename.
In aanvulling, robots kunnen de beweging van lopen niet gemakkelijk nabootsen. "Met een robot "Belote legt uit, "er is een direct commando (hef been 'x' bedrag, leun naar voren 'y' bedrag, strek been naar beneden 'z' bedrag, enzovoort). Met mensen, echter, er is geen 'feedback'-mechanisme - je hersenen communiceren niet constant met je benen over waar ze moeten worden geplaatst. In plaats daarvan, je leunt gewoon naar voren en 'valt, ' je been zo instellen dat het de schok absorbeert wanneer je voet contact maakt met de vloer."
Het is dus niet waarschijnlijk dat we in ons leven een werkende Optimus Prime of robot zoals hij zouden kunnen zien. Maar er bestaan al robots die van vorm kunnen veranderen of een andere vorm kunnen krijgen. We zullen er enkele bekijken - en hoe ze zich verhouden tot Prime - in de volgende sectie.
Inhoud
- Zelfherconfigurerende robots
- Rooster Robots
- Een zwerm parallelle hersenen
Zelfherconfigurerende robots
 Optimus Prime kan zowel een tweevoetige robot als een semi-vrachtwagen zijn. Afbeelding © 2007 Dreamworks Pictures
Optimus Prime kan zowel een tweevoetige robot als een semi-vrachtwagen zijn. Afbeelding © 2007 Dreamworks Pictures Het coolste aan Transformers, natuurlijk, is dat ze twee totaal verschillende vormen kunnen aannemen. De meeste kunnen tweevoetige robots of werkende voertuigen zijn. Sommige kunnen in plaats daarvan veranderen in wapens of elektronische apparaten. De twee vormen van een Transformer hebben enorm verschillende sterke punten en mogelijkheden.
Dit is totaal anders dan de meeste echte robots, die meestal maar goed zijn in het uitvoeren van één taak of een paar gerelateerde taken. De Mars-verkenningsrovers, bijvoorbeeld, kan het volgende doen:
- Energie opwekken met zonnecellen en opslaan in batterijen
- Rijd door het landschap
- Foto's maken
- Boor in rotsen
- Gebruik spectrometers om temperaturen te registreren, chemische samenstellingen, röntgenstralen en alfadeeltjes
- Stuur de opgenomen gegevens terug naar de aarde met behulp van radiogolven
 Een artistieke weergave van een Mars Exploration Rover op het oppervlak van Mars Afbeelding met dank aan NASA
Een artistieke weergave van een Mars Exploration Rover op het oppervlak van Mars Afbeelding met dank aan NASA Een Exploration Rover zou niet erg goed zijn in taken die niet in deze categorieën passen. Het kan niet, bijvoorbeeld, een brug monteren, passen in zeer kleine ruimtes of andere robots bouwen. Met andere woorden, het zou een waardeloze zoek- en reddingsrobot zijn, en het zou helemaal niet passen in een geautomatiseerde fabriek.
 NASA's Snakebot is een voorbeeld van een kettingrobot. Afbeelding met dank aan NASA
NASA's Snakebot is een voorbeeld van een kettingrobot. Afbeelding met dank aan NASA 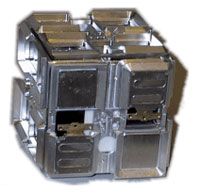 Een Telecube G2-module Afbeelding met dank aan Palo Alto Research Center Incorporated
Een Telecube G2-module Afbeelding met dank aan Palo Alto Research Center Incorporated Dat is waarom ingenieurs zich ontwikkelen robots opnieuw configureren . Net als transformatoren, deze robots kunnen van vorm veranderen om bij de taak te passen. Maar in plaats van van de ene vorm naar de andere te veranderen, als een tweevoetige robot naar een trekker-oplegger, het herconfigureren van robots kan vele vormen aannemen. Ze zijn veel kleiner dan echte Transformers zouden zijn; sommige herconfigurerende robot modules zijn klein genoeg om in de hand van een persoon te passen.
Een module is in wezen een kleine, relatief eenvoudige robot of stuk van een robot. Van veel van deze kleine, identieke modules. Een modulaire robot kan uit een paar modules bestaan of uit meerdere, afhankelijk van het ontwerp van de robot en de taak die hij moet uitvoeren. Sommige modulaire robots bestaan momenteel alleen als computersimulaties; andere bevinden zich nog in de beginfase van ontwikkeling. Maar ze werken allemaal volgens hetzelfde basisprincipe - veel kleine robots kunnen worden gecombineerd om één grote te creëren.
Modules kunnen zelf niet veel. Een herconfigurerend systeem moet ook beschikken over:
- Verbindingen tussen de modules
- Systemen die bepalen hoe de modules ten opzichte van elkaar bewegen
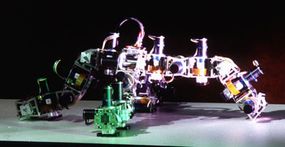
meest modulaire, herconfigurerende robots passen in een van de drie categorieën:ketting, rooster en modulaire configuratie. Kettingrobots zijn lange ketens die op bepaalde punten met elkaar kunnen worden verbonden. Afhankelijk van het aantal ketens en waar ze aansluiten, deze robots kunnen lijken op slangen of spinnen. Ze kunnen ook rollende lussen of tweevoeters worden, lopende robots. Een set modulaire kettingen kan een hindernisbaan navigeren door als een slang door een tunnel te kruipen, als een spin rotsachtig terrein oversteken en als tweevoeter op een driewieler over een brug rijden.
Voorbeelden van kettingrobots zijn Polybot en Polypod van Palo Alto Research Center (PARC) en Snakebot van NASA. De meesten hebben een mens nodig of, in theorie, een andere robot, om de verbindingen handmatig met schroeven vast te zetten.
Gesimuleerde robots
Computersimulaties zijn een essentieel onderdeel van robotica-onderzoek, vooral bij het herconfigureren van robots. Wetenschappers gebruiken computers om erachter te komen hoe modules ten opzichte van elkaar zullen bewegen voordat ze de modules leren hoe ze dat moeten doen. In sommige gevallen, computersimulaties bestaan al lang voordat echte robots bestaan. Het Rus Robotics Laboratory van het Massachusetts Institute of Technology (MIT) heeft talloze simulaties van hoe deze robots zich verplaatsen.
Rooster Robots
 De Molecule-modules van Rus Robotics Laboratory hebben twee kubussen die onder een hoek van 90 graden zijn verbonden. Eén oppervlak op elke kubus bevat de verbinding die deze verbindt met de andere helft van de module. De andere vijf oppervlakken kunnen aan andere modules worden bevestigd. Afbeelding met dank aan Keith Kotay/Rus Robotics Laboratory
De Molecule-modules van Rus Robotics Laboratory hebben twee kubussen die onder een hoek van 90 graden zijn verbonden. Eén oppervlak op elke kubus bevat de verbinding die deze verbindt met de andere helft van de module. De andere vijf oppervlakken kunnen aan andere modules worden bevestigd. Afbeelding met dank aan Keith Kotay/Rus Robotics Laboratory Het basisidee van een rooster robot is dat zwermen van kleine, identieke modules die kunnen worden gecombineerd om een grotere robot te vormen. Er bestaan al verschillende prototype roosterrobots, maar sommige modellen bestaan alleen als computersimulaties. Rasterrobots bewegen door over elkaar heen te kruipen, bevestigen aan en losmaken van verbindingspunten op naburige robots. Het is net als de manier waarop de tegels bewegen in een schuifpuzzel. Deze manier van bewegen heet substraat herconfiguratie – de robots kunnen alleen langs punten binnen het rooster van robots bewegen. Roostermodules kunnen ofwel zelfstandige stroombronnen hebben, of ze kunnen stroombronnen delen via hun verbindingen met andere modules.
Rasterrobots kunnen zich over moeilijk terrein voortbewegen door over elkaar heen te klimmen, de vorm van het terrein volgen, of ze kunnen een vaste stof vormen, stabiel oppervlak om andere structuren te ondersteunen. Genoeg roosterrobots kunnen zowat elke vorm creëren. Computersimulaties laten zien dat ze veranderen van een stapel onderdelen naar een theekopje en van een hond naar een bank. De modules kunnen worden gecombineerd om vlakke oppervlakken te maken, ladders, beweegbare aanhangsels en vrijwel elke andere denkbare vorm. Dus een roosterrobot lijkt meer op een Terminator T-1000 dan op een Transformer.
Robotica-labs hebben verschillende roosterrobotsystemen gemaakt en getheoretiseerd:
- PARC's Telecube en het Rus Robotics Laboratory's Crystal van het Massachusetts Institute of Technology (MIT) gebruiken moleculen die uitzetten, samentrekken en hechten aan andere moleculen.
- PARC's Proteo is een theoretische roosterrobot die alleen bestaat als computersimulaties. Proteo is een verzameling van ruitvormige dodecaëders (twaalfzijdige structuren met ruitvormige vlakken). De modules bewegen door over elkaars randen te rollen.
- Rus Robotica Laboratorium Moleculen modules zijn gemaakt van twee kubussen die onder een hoek van 90 graden zijn verbonden. Als resultaat, zijn beweging ziet er een beetje anders uit dan robots gemaakt van individuele kubussen. U kunt een demonstratie zien van hoe Molecule beweegt op de website van Rus Robotics Laboratory
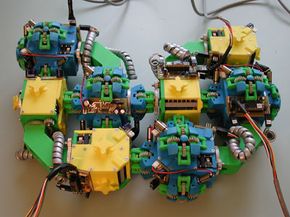
 Zwermbots kunnen zelfstandig manoeuvreren, of ze kunnen combineren om taken uit te voeren die ze alleen niet zouden kunnen uitvoeren. Afbeelding met dank aan professor Marco Dorigo
Zwermbots kunnen zelfstandig manoeuvreren, of ze kunnen combineren om taken uit te voeren die ze alleen niet zouden kunnen uitvoeren. Afbeelding met dank aan professor Marco Dorigo Zoals roosterrobots, mobiele herconfiguratierobots zijn klein, identieke modules die kunnen worden gecombineerd om grotere robots te vormen. Echter, ze hebben de hulp van hun buren niet nodig om van plaats naar plaats te komen - ze kunnen zich alleen verplaatsen. Mobiele configuratierobots lijken veel op cartoonafbeeldingen van scholen vissen of zwermen vogels die samen een gereedschap of structuur vormen. Ze bewegen onafhankelijk totdat ze samen moeten komen om een specifieke taak te volbrengen. Zwermbots , een project van het Future and Emerging Technologies-programma in de Europese Unie, zijn mobiele herconfiguratierobots.
Ook al zien deze robots er heel anders uit, ze hebben veel overeenkomsten in hoe ze bewegen en werken. We zullen deze hierna bekijken.
Een echt echte transformatorTransformatoren zijn niet per se praktisch of zelfs mogelijk op grote schaal. Maar ingenieurs van Himeji Soft Works hebben een kleinschalige robot ontwikkeld die echt van een auto naar een tweevoeter en terug verandert. Je kunt een video van deze robot zien, inclusief de transformatie, op YouTube.
Een zwerm parallelle hersenen
 Transformers zijn zelfbewust en kunnen zelf beslissingen nemen, maar hun bewegende delen zijn niet autonoom. Afbeelding © 2007 Dreamworks Pictures
Transformers zijn zelfbewust en kunnen zelf beslissingen nemen, maar hun bewegende delen zijn niet autonoom. Afbeelding © 2007 Dreamworks Pictures Naast hun grootte en modulaire structuur, zelf-herconfigurerende robots verschillen op een belangrijke manier van Transformers. Optimus Prime en andere Transformers zijn zelfbewust en kunnen onafhankelijke beslissingen nemen, en ze houden hun hersenen op één locatie in hun lichaam. Het brein van een transformator bestuurt elk van zijn bewegende delen, en de onderdelen zelf hebben weinig of geen autonomie.
In de meeste modulaire robotconfiguraties, Hoewel, elke module heeft enige beslissingsbevoegdheid en kan helpen bepalen waar deze naartoe gaat. In plaats van dat één module de baas is over alle andere, planning en bewegingsmogelijkheden zijn: verdeeld over alle modules.
Dit idee -- een zwerm kleine robots, die elk mogen beslissen waar het naartoe gaat -- klinkt misschien rampzalig. Maar de modules zijn geprogrammeerd met een reeks op geometrie gebaseerde regels over hoe te bewegen. Ze zijn ook geprogrammeerd met algoritmen die hun beweging regelen. Deze algoritmen en regels stellen de robots in staat om erachter te komen hoe ze van de ene vorm in de andere kunnen veranderen en over het terrein kunnen bewegen.
Voor zeer complexe manoeuvres, de robots plannen in plaats daarvan een reeks subvormen in plaats van te proberen in één stap een grote verandering aan te brengen. Bijvoorbeeld, een roosterrobot die moet veranderen van een willekeurige stapel modules naar een tweevoetige robot, zou eerst de benen kunnen vormen. Vervolgens, het zou die benen als steiger kunnen gebruiken om de bovenste helft van de robot te bouwen.
 Momenteel, elk modulair robotsysteem heeft zijn eigen regels om te bepalen hoe het beweegt en herconfigureert. Afbeelding met dank aan Palo Alto Research Center Incorporated
Momenteel, elk modulair robotsysteem heeft zijn eigen regels om te bepalen hoe het beweegt en herconfigureert. Afbeelding met dank aan Palo Alto Research Center Incorporated Momenteel, veel van deze robots kunnen zelf eenvoudige overgangen van de ene vorm naar de andere maken. Bij complexere veranderingen kan de hulp van een wetenschapper nodig zijn, het verzamelen van robots semi-autonoom maken in plaats van autonoom. Een paar robots die zich nog in de beginfase van ontwikkeling bevinden, krijgen al hun instructies van een computerwerkstation en nemen zelf geen beslissingen.
Momenteel, de meeste herconfigurerende robots hebben hun eigen systeem van regels en algoritmen, en regelsets werken alleen voor de robots waarvoor ze zijn ontworpen. Met andere woorden, de regels voor Rus Robotics Laboratory's Crystal werken niet met Molecule.
Echter, wetenschappers gebruiken computersimulaties om bewegingstheorieën te onderzoeken die zouden kunnen werken, ongeacht hoe een robotmodule eruitziet. Deze theorieën zouden basisregels kunnen vaststellen voor robotbewegingen, inclusief:
- Vaststellen hoeveel stappen er nodig zijn om een voltooide structuur te maken
- Botsingen tussen modules voorkomen
- De modules toestaan een structuur te creëren die consistent stabiel is en niet instort als de robots bewegen
- Ervoor zorgen dat ketens of verzamelingen modules de benodigde punten kunnen bereiken
Indien succesvol, dit onderzoek zou het voor ingenieurs gemakkelijker kunnen maken om nieuwe, werkende modulaire robots die dezelfde bewegingsregels volgen.
Ook al lopen en praten deze robots niet zoals Transformers doen, ze kunnen in vrijwel elke vorm veranderen, voorzien van de juiste programmering en instructies. Voor meer informatie over hen en over Transformers, zie de links op de volgende pagina.
Waar bewaren Transformers hun hersens?
Tijdens het werken aan dit artikel, het personeel van HowStuffWorks had een levendige discussie over waar Transformers hun hersens houden. We hadden allemaal hetzelfde antwoord intuïtief:het brein van een Transformer moet in zijn hoofd zitten (of in zijn cockpit in voertuigvorm). Veel stripboek- en cartoonafbeeldingen lijken dit idee te ondersteunen. Echter, het verklaart niet helemaal hoe delen van Optimus Prime afzonderlijk kunnen werken, tenzij Prime radio- of infraroodsignalen gebruikt om opdrachten te verzenden en te ontvangen. Het verklaart ook niet helemaal waarom de persoonlijkheden van Constructicons anders zijn dan hun component Transformers. Je kunt meer lezen over de hersenen van Transformers en hoe ze werken bij The Matrix, een onofficieel tijdschrift Transformers.
Veel meer informatie
Gerelateerde HowStuffWorks-artikelen
- Hoe de Mars Exploration Rover werkt
- Hoe robots werken
- Hoe ASIMO werkt
Meer geweldige links
- Rus Robotics Laboratory:modulaire robots
- Modulaire Robotica bij PARC
- DARPA Microrobot-project
bronnen
- Carnegie Mellon Universiteit. "I-Cubes." http://www.cs.cmu.edu/~unsal/research/ices/cubes/
- Casal, Arancha. "Zelfherconfiguratieplanning voor een klasse modulaire robots." Xerox Palo Alto onderzoekscentrum.
- DARPA Microbot-project http://www.egr.msu.edu/microrobot/
- Mayfield, Kendra. "De vorm van toekomstige bots." Bedrade. 7 oktober 2002. http://www.wired.com/news/gizmos/0, 1452, 55421, 00.html?tw=wn_story_related
- PARK. Modulaire robotica:ketting. http://www2.parc.com/spl/projects/modrobots/chain/index.html
- PARK. Modulaire robotica:rooster. http://www2.parc.com/spl/projects/modrobots/lattice/index.html
- PARK. Taxonomie van statistisch stabiele voortbeweging http://www2.parc.com/spl/projects/modrobots/chain/polypod/locomotion.html
- PARC:Modulaire Robotica. http://www2.parc.com/spl/projects/modrobots/index.html
- Rus Robotica Laboratorium. Modulaire zelfconfigurerende robots. http://groups.csail.mit.edu/drl/modular_robots/modular_robots.html
- Schenker, PS et al. "Herconfigureerbare robots voor verkenning van elk terrein." Jet Propulsion Laboratorium, Californië Instituut voor Technologie.
- Schachtman, Noach. "De supersonische vormveranderende bommenwerper." Populaire wetenschap. Juli 2006. http://www.popsci.com/popsci/aviationspace/0f2505a52aceb010vgnvcm1000004eecbccdrcrd.html
- Van der Helm, Peter A. Structurele informatietheorie en zijn toepassingen. http://www.nici.kun.nl/~peterh/doc/sit.html
- Zhang, Ying, et al. "Een platform voor het bestuderen van voortbewegingssystemen:modulaire herconfigureerbare robots." Systeem- en praktijklab, Palo Alto onderzoekscentrum.

Hoofdlijnen
- Waarom het de menselijke natuur is om onze instincten te negeren
- Hoe maak je een 3D-model van het spierstelsel voor een wetenschapsklasse
- Mitochondria: definitie, structuur en functie (met diagram)
- Voorspelling (biologie): definitie, soorten en voorbeelden
- Drie mechanismen van genetische recombinatie in Prokaryotes
- Kan ik een medicijn nemen om een bepaalde herinnering uit te wissen?
- Hoe de lengte van DNA-fragmenten te berekenen
- Commerciële voorouderstests kunnen onthullen hoeveel Neanderthaler-DNA u heeft
- Goed excuus,






 Hoe ondersteunt het foto-elektrisch effect de deeltjestheorie van licht?
Hoe ondersteunt het foto-elektrisch effect de deeltjestheorie van licht? - Welwillende drones:is een toekomst zonder landmijnen slechts een decennium verwijderd?
- Landforms of Plate Boundaries
- Welke effecten heeft olieboringen op de oceaan?
- Wat als twee mensen in drijfzand struikelen:zou de zwaardere persoon sneller zinken?
- Kenmerken van Typhoons
- Hoe te meten Geluidsvervuiling
- Hoe een decimaal in een breuk in een Casio FX-260 Solar
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
