Wetenschap
Robotgrijpers in Spider-Man-stijl trotseren de zwaartekracht
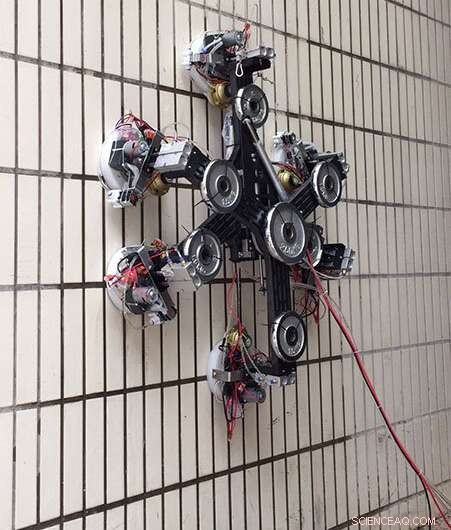
Een muurklimrobot gebruikt de nuldrukverschilmethode om zuigkracht te vormen. Krediet:Xin Li en Kaige Shi
Met speciaal ontworpen vacuümzuigunits kunnen mensen muren beklimmen. Wetenschappers hebben een afzuigunit ontwikkeld die kan worden gebruikt op ruwe oppervlakken, hoe gestructureerd ook, en dat heeft toepassingen in de ontwikkeling van klimrobots en robotarmen met grijpmogelijkheden.
Traditionele methoden van vacuümzuigen en eerdere vacuümzuigapparaten kunnen de zuigkracht op ruwe oppervlakken niet handhaven vanwege vacuümlekkage, wat leidt tot falen van de zuigkracht.
Onderzoekers Xin Li en Kaige Shi ontwikkelden een nuldrukverschil (ZPD) -methode om de ontwikkeling van vacuümzuigeenheden te verbeteren. Hun methode overwon lekkagebeperkingen door een snelle roterende waterring tussen het oppervlak en de zuignap te gebruiken om het vacuüm te behouden. Ze bespreken hun werk in de Fysica van vloeistoffen .
"Er zijn veel toepassingen van ons ontwerp, maar we denken dat de muurklimrobot het nuttigst zal zijn, " zei Li. "Vergeleken met andere muurklimrobots, de robot met onze op ZPD gebaseerde zuigeenheid realiseert een verrassende prestatieverbetering."
De middelpuntvliedende kracht van het roterende water elimineert het drukverschil aan de grens van de vacuümzone om vacuümlekkage te voorkomen. Het kan een hoge vacuümdruk in de zuignap handhaven.
Hun ZPD-afzuigunit is energiezuinig en kleiner en lichter dan traditionele afzuigunits. De onderzoekers testten hun apparaat met drie verschillende zuigmaten en toepassingen:op een robotarm om objecten vast te pakken en te hanteren, op een hexapod-wandklimrobot en als een Spider-Man-achtig wandklimapparaat.
“De volgende stap in dit onderzoek is het verminderen van het waterverbruik. Als het waterverbruik kan worden verminderd, de afzuigunit zal zeer lang werken met weinig water zodat de wandklimrobot zijn eigen water kan dragen in plaats van aangesloten te zijn op een toevoer, " zei Li.
 Ontdekking kan leiden tot zelfrijdende robots
Ontdekking kan leiden tot zelfrijdende robots- Nieuwe aanpak maakt het lichtste autometaal zuiniger, bruikbaar
- Onderzoekers rapporteren mogelijke oplossingen voor moeilijk te recyclen kunststoffen
- Nu kunnen metalen oppervlakken onmiddellijke bacteriedoders zijn
- Onderzoekers breien energiebesparende kledingvezels
- Sterke onderzeese aardbeving schudt Indonesië; geen tsunami-waarschuwing
- Antartica, hart van de aarde heeft bescherming nodig:expert
- Groener gaan:Finlands nieuwe gasgestookte ijsbreker
- Klimaatverandering om huishoudbudgetten op te rekken
- Ploegen, mulchen of direct zaaien:modellering van bodemstructuurveranderingen als belangrijk fundamenteel onderzoek
Hoofdlijnen
- Zoogdierhersenen identificeren type geur sneller dan ooit werd gedacht
- Cytoplasma bacteriecellen
- "What Does Heterozygous Mean?
- Nederlandse onderzoekers bouwen ecosysteem van de toekomst
- Grootte is belangrijk - hoe trips hun partners kiezen
- Hoeveel spieren heb je nodig om te glimlachen?
- Nieuwe zoomtechniek onthult voor het eerst een elektrisch circuit van cellen
- Effecten van de microscoop op Science
- Deze spitsmuizen hebben koppen die krimpen met het seizoen





 TESS klaar voor vertrek
TESS klaar voor vertrek- Zwitserse privacywaakhond zoekt details over Facebook-valuta
- Ontdekking van hoge aardwarmte op Zuidpool
- NASA-ruimtelasers brengen smeltwatermeren op Antarctica met opvallende precisie in kaart
- Eerste bewijs dat water op het maanoppervlak kan worden gecreëerd door de magnetosfeer van de aarde
- De vier typen vermenigvuldigingseigenschappen
- Kenmerken van Neptunus
- Verbetering van de publieke betrokkenheid bij wetenschapsmusea
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
