Wetenschap
Onderzoekers besturen zachte robots met behulp van magnetische velden
Krediet:North Carolina State University
Een team van technische onderzoekers heeft een fundamentele vooruitgang geboekt bij het besturen van zogenaamde zachte robots, magnetische velden gebruiken om op afstand microdeeltjesketens te manipuleren die zijn ingebed in zachte robotapparaten. De onderzoekers hebben al meerdere apparaten gemaakt die gebruik maken van de nieuwe techniek.
"Door deze zelf-assemblerende kettingen in zachte robots te we kunnen ze complexere functies laten uitvoeren met behoud van relatief eenvoudige ontwerpen, " zegt Joe Tracy, een universitair hoofddocent materiaalkunde en engineering aan de North Carolina State University en corresponderende auteur van een paper over het werk. "Mogelijke toepassingen voor deze apparaten variëren van op afstand geactiveerde pompen voor medicijnafgifte tot de ontwikkeling van op afstand inzetbare structuren."
De nieuwe techniek bouwt voort op eerder werk op het gebied van zelfmontage, magnetisch aangedreven composieten door Tracy en Orlin Velev, de INVISTA-hoogleraar Chemische en Biomoleculaire Engineering aan NC State.
Voor deze studie is de onderzoekers introduceerden ijzermicrodeeltjes in een vloeibaar polymeermengsel en pasten vervolgens een magnetisch veld toe om de microdeeltjes parallelle ketens te laten vormen. Het mengsel werd vervolgens gedroogd, met achterlating van een elastische dunne film van polymeer ingebed met de uitgelijnde ketens van magnetische deeltjes.
"De kettingen stellen ons in staat om het polymeer op afstand te manipuleren als een zachte robot door een magnetisch veld te besturen dat de kettingen van magnetische deeltjes beïnvloedt, ' zegt Tracy.
specifiek, de richting van het magnetische veld en de sterkte ervan kunnen worden gevarieerd. De ketens van ijzermicrodeeltjes reageren door zichzelf en het omringende polymeer in dezelfde richting uit te lijnen als het aangelegde magnetische veld.
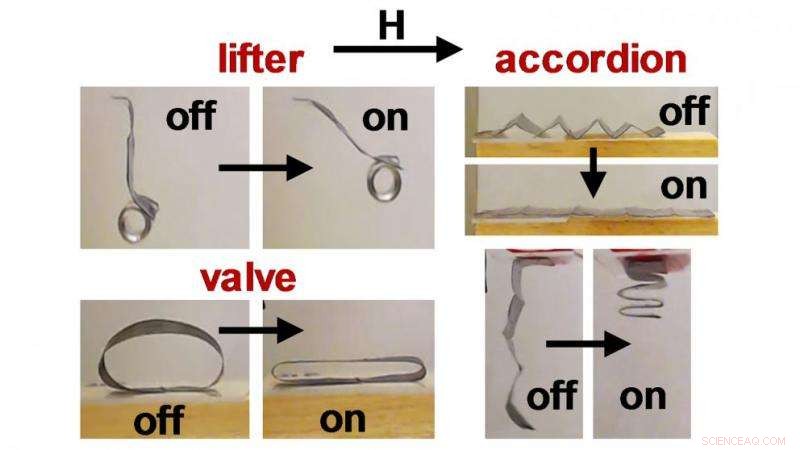
Met behulp van deze techniek, de onderzoekers hebben drie soorten zachte robots gemaakt. Een apparaat is een cantilever die tot 50 keer zijn eigen gewicht kan tillen. Het tweede apparaat is een accordeonachtige structuur die uitzet en samentrekt, het gedrag van spieren nabootsen. Het derde apparaat is een buis die is ontworpen om te functioneren als een peristaltische pomp - een gecomprimeerd gedeelte gaat over de lengte van de buis, net als iemand die het laatste beetje tandpasta uitknijpt door met zijn vinger over de tube te gaan.
"We werken nu aan het verbeteren van zowel de controle als de kracht van deze apparaten, om het potentieel van zachte robotica te vergroten, ' zegt Tracy.
De onderzoekers hebben ook een metriek ontwikkeld voor het beoordelen van de prestaties van magnetische lifters, zoals het cantilever-apparaat.
"We doen dit door de hoeveelheid gewicht te meten die wordt opgetild en rekening te houden met zowel de massa van deeltjes in de lifter als de sterkte van het magnetische veld dat wordt toegepast, " zegt Ben Evans, co-auteur van het artikel en een universitair hoofddocent natuurkunde aan de Elon University. "We denken dat dit een handig hulpmiddel is voor onderzoekers op dit gebied die een empirische manier willen vinden om de prestaties van verschillende apparaten te vergelijken."
 Zware metalen uit water verwijderen met MOF's
Zware metalen uit water verwijderen met MOF's- Snelle oppervlaktedynamiek maakte koude verbinding van metalen glazen mogelijk
- Autonome zelfgenezing gezien in piëzo-elektrische moleculaire kristallen
- PH-waarden aanpassen
- Secundaire bouweenheden (SBU's) - het keerpunt in de ontwikkeling van metaal-organische raamwerken (MOF's)
Hoofdlijnen
- Drie voorbeelden van protisten met wetenschappelijke namen
- Haploid versus diploïde: wat zijn de overeenkomsten & verschillen?
- Vergelijk en vergelijk DNA en RNA
- Bacteriën: definitie, soorten en voorbeelden
- Gene drives hebben het potentieel om muggenpopulaties te onderdrukken, maar resistente muggen duiken op
- Nieuwe studie geeft aan hoe bevruchting veranderingen teweegbrengt in duizenden eiwitten in kikkereieren
- Onderzoekers krijgen voor het eerst een volledig beeld van eiwit achter tastzin
- Wetenschappers nemen de temperatuur van knokkelkoorts risico
- Paranoia zal vernietigen:wanneer overschrijdt gezonde angst de grens in paranoia?





 Fiat Chrysler-manager aangeklaagd in Amerikaanse dieselemissiezaak
Fiat Chrysler-manager aangeklaagd in Amerikaanse dieselemissiezaak- Tweederde van tropische bossen bedreigd in volgend decennium
- Is Permafrost echt,
- Afbeelding:vormveranderende spiegel
- Nieuwe chemische methode maakt het gemakkelijker om vervuilende pesticiden uit water te halen
- Goede trillingen:neutronen geven inzicht in akoestische fracking
- NASA's infraroodanalyse van tropische storm Sebastien ziet windschering
- Innovatie is wijdverbreid in landelijke gebieden, niet alleen steden
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
