Wetenschap
Onderzoeksteam ontwikkelt nieuwe door ultrageluid aangedreven actuator om microrobot te ontwikkelen
De zoektocht naar de ontwikkeling van een draadloze microrobot voor biomedische toepassingen vereist een kleinschalige "motor" die draadloos kan worden aangedreven via biologische media. Hoewel magnetische velden kunnen worden gebruikt om kleine robots draadloos van stroom te voorzien, ze bieden geen selectiviteit omdat alle actuatoren (de componenten die de beweging regelen) onder hetzelfde magnetische veld gewoon dezelfde beweging volgen. Om deze intrinsieke beperking van magnetische activering aan te pakken, een team van Duitse onderzoekers heeft een manier ontwikkeld om microbellen te gebruiken om de specificiteit te bieden die nodig is om microrobots voor biomedische toepassingen aan te drijven.
Deze week in Technische Natuurkunde Brieven , het team beschrijft deze nieuwe aanpak die meerdere voordelen biedt ten opzichte van eerdere technieken.
"Eerst, door ultrageluid op verschillende frequenties toe te passen, meerdere aandrijvingen kunnen afzonderlijk worden aangesproken; tweede, de actuatoren hebben geen ingebouwde elektronica nodig waardoor ze kleiner zijn, lichter en veiliger; en ten derde, de aanpak is schaalbaar tot op de millimeter, " zei Tian Qiu, een onderzoeker aan het Max Planck Instituut voor Intelligente Systemen in Duitsland.
Het onderzoeksteam kwam onderweg enkele verrassingen tegen. Normaal gesproken een speciaal materiaal, zoals een magnetisch of piëzo-elektrisch materiaal, is vereist voor een actuator. In dit geval, ze gebruikten een standaard commercieel polymeer dat eenvoudig luchtbellen opsluit, en vervolgens de lucht-vloeistof-interface van de ingesloten bellen gebruikten om de ultrasone kracht om te zetten in mechanische beweging.
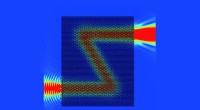
"We ontdekten dat een dun oppervlak (30-120 micrometer effectieve dikte) met de juiste topologische patronen voortstuwingskracht kan leveren met behulp van ultrageluid, en duizenden van deze bubbels kunnen samen een apparaat duwen op millimeterschaal, " zei Qiu. "De eenvoud van de structuur en het materiaal om deze taak te volbrengen was een aangename verrassing."
Het team kijkt er nu al naar uit om hun actuator verder te ontwikkelen.
"De volgende stappen zijn om de voortstuwingskracht van het functionele oppervlak te vergroten, om de actuator te integreren in een bruikbaar biomedisch apparaat, en dan te testen in een echte biologische omgeving, inclusief in-vivo, ' zei Qi.
De adoptie van microgestructureerde oppervlakken als draadloze actuatoren opent veelbelovende nieuwe mogelijkheden in de ontwikkeling van geminiaturiseerde apparaten en hulpmiddelen voor fluïde omgevingen die toegankelijk zijn door ultrasone velden met lage intensiteit. Deze functionele oppervlakken kunnen dienen als kant-en-klare draadloze actuatoren, voeding van geminiaturiseerde biomedische apparaten voor toepassingen zoals actieve endoscopen.
 Wetenschappers onthullen routekaart om de ontwikkeling van osteoporosebehandeling te ondersteunen
Wetenschappers onthullen routekaart om de ontwikkeling van osteoporosebehandeling te ondersteunen- Tips voor pipetteren autoclaveren
- Een nieuwe bètavoltaïsche technologie met kleurstoffen voor een betere energieproductie
- Studie onthult unieke fysieke, chemische eigenschappen van cicadevleugels
- Kunstmatig synaptisch apparaat simuleert de functie van het menselijk brein
- Honderden vogels getroffen na olieramp Rotterdam
- Hoe wordt kernsplijting omgezet in elektrische energie?
- Zombiestorm Leslie raast Portugal binnen
- Atmospheric Infrared Sounder (AIRS) markeert 15 jaar zien wat er in de lucht hangt
- Rook van bosbranden kan de luchtkwaliteit tot ongezonde niveaus doen dalen
Hoofdlijnen
- Hebben Prokaryotes celwanden?
- Kolonies tellen in de microbiologie
- Wat irriteert een chimpansee?
- Leven gelukkige mensen langer?
- Tabaksplanten als levensredders
- Onderzoekers observeren enzymen die cellulose afbreken om de productie van biobrandstoffen te ondersteunen
- Nieuw ontwikkelde schakelaar activeert genen duizenden keren beter dan de natuur
- Nidovirussen brengen overtollig genen tot expressie en coderen voor meer eiwitten dan eerder werd aangenomen, studie vondsten
- De voordelen van het gebruik van Sticky End Enzymen
- Ontdekking werpt nieuw licht op hoe cellen bewegen
- Onderzoekers ontwikkelen computermodel van ferrofluïde beweging

- Een studie onderzoekt de grenzen van topologische isolatoren met behulp van geluidsgolven
- Nature's funhouse-spiegel:asymmetrie in het proton begrijpen

- Team zet grote stap richting bedrukte anisotrope magneten

 De spookbossen van de oostkust
De spookbossen van de oostkust- Onderzoekers ontwerpen katalysatoren voor dinucleaire locaties en onthullen het onderliggende mechanisme
- Geef jij een nieuwe leider een kans? Je kunt vast komen te zitten in negativiteit
- Om een betere halfgeleider te bouwen, identificeer eerst de gebreken
- Air Canada schort meerderheid van internationale vluchten op
- Computermodellen laten duidelijke voordelen zien in nieuwe typen windturbines
- Maïs verbindt vele generaties Maya
- NASA's Odyssey-orbiter markeert 20 historische jaren van het in kaart brengen van Mars
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
