Wetenschap
Kleine zachte robot kan in kleinere stukjes splitsen en vervolgens weer in elkaar zetten na passage door kleine ruimtes
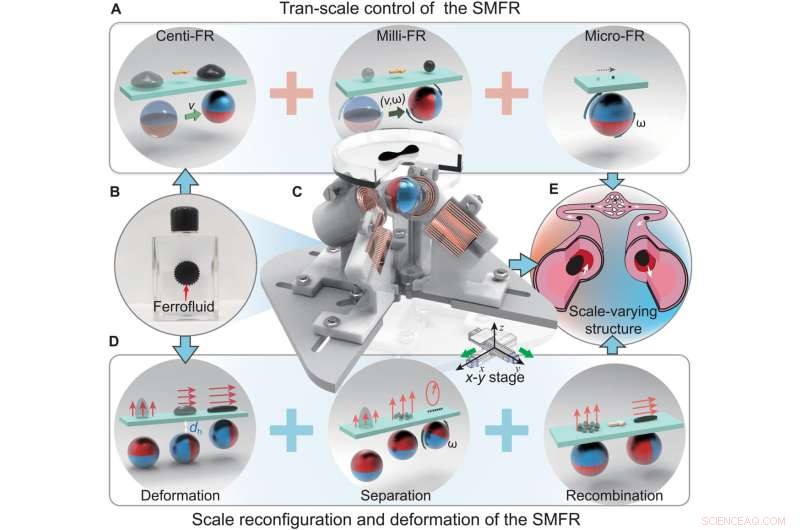
Overzicht van trans-schaal manoeuvre en schaal herconfiguratie strategieën van de schaal herconfigureerbare miniatuur ferrofluïdische robots (SMFR's). (A) Trans-schaal controle van de SMFR:voortbeweging van de centi-FR, milli-FR en micro-FR op basis van respectievelijk magnetische gradiënt, zowel magnetische gradiënt als koppel, en alleen magnetisch koppel. (B) Reactiegedrag van ferrofluïde druppeltjes in magnetische velden. (C) De SMFR wordt gemanipuleerd door een op maat ontworpen magnetisch activeringssysteem (het M3RA-systeem) dat bestaat uit vier elektromagneten, een sferische permanente magneet (SPM) en een gemotoriseerde translatiefase. Om de interne samenstelling van het systeem gemakkelijk te kunnen observeren, verbergen we een kwart van de structuur. (D) Vervorming en herconfiguratie van de schaal van de SMFR:rekvervorming, verkleining door scheiding en schaalvergroting door recombinatie. De rode pijl geeft de polarisatierichting van het magnetische veld weer. (E) Typisch toepassingsscenario van de SMFR op basis van de combinatie van de bovenstaande capaciteiten:voortbeweging in een sterk variabele ruimte zoals het vasculaire netwerk. Krediet:Wetenschappelijke vooruitgang (2022). DOI:10.1126/sciadv.abq1677
Een team van onderzoekers van de Soochow University heeft in samenwerking met twee collega's van het Max Planck Institute for Intelligent Systems en een andere van het Harbin Institute of Technology een soort zachte robot ontwikkeld die in kleinere componenten kan worden opgesplitst om door kleine ruimtes te gaan en vervolgens weer in elkaar te zetten. In hun paper gepubliceerd in het tijdschrift Science Advances , beschrijft de groep hoe ze hun kleine robots hebben gemaakt en stelt ze mogelijke toepassingen voor.
Terwijl de wetenschap van robotica zich verder ontwikkelt, blijven ingenieurs over de hele wereld nieuwe manieren vinden om ze te maken. In deze nieuwe poging maakten de onderzoekers de hunne van een ferrovloeistof (magnetische ijzeroxide-nanodeeltjes) die ze in een heldere olie suspendeerden. De robot wordt bestuurd met behulp van externe magneten.
Door een robot te gebruiken die is gemaakt van een materiaal dat slechts heel losjes bij elkaar wordt gehouden, merken de onderzoekers op, kan de vorm op verzoek worden gewijzigd. Door meerdere magnetische velden toe te passen, toonden ze aan dat het mogelijk was om hun robot door een doolhof te leiden, waarbij hij soms van vorm veranderde om obstakels te overwinnen. Ze dwongen het om uit te rekken, bijvoorbeeld om zich door een nauwe doorgang te wurmen. Ze braken het ook in een gewenst aantal kleinere delen om door een poreus materiaal te gaan. In beide gevallen werd de robot vervolgens eenvoudig weer in elkaar gezet in een enkele ronde robotvorm en vervolgde hij zijn reis. Ze merken op dat zo'n robot in een groot aantal verschillende maten kan worden gemaakt.
De robot zou in medische toepassingen kunnen worden gebruikt als middel om medicijnen naar moeilijk bereikbare lichaamsdelen, zoals longklieren of delen van de hersenen, te vervoeren. De onderzoekers erkennen dat het ontwerp voor praktische toepassingen veel obstakels zou moeten overwinnen, het meest voor de hand liggend de ontwikkeling van een magnetisch controlesysteem dat nauwkeurig bot zoals de schedel kan binnendringen. Ondertussen hebben anderen opgemerkt dat een dergelijk robotsysteem nuttig zou kunnen zijn in lab-on-a-chip-apparaten waar chemische processen worden uitgevoerd voor taken zoals virusdetectie. De kleine nieuwe robots kunnen misschien worden gebruikt om de chemicaliën te vervoeren die nodig zijn voor de reacties. + Verder verkennen
On-the-fly herconfigureerbaar magnetisch slijm gebruikt als een robot
© 2022 Science X Network
 Wetenschappers identificeren O-GlcNAcylatie als oorzaak van pancreastumorgroei door MDH1 te reguleren
Wetenschappers identificeren O-GlcNAcylatie als oorzaak van pancreastumorgroei door MDH1 te reguleren- Het tweaken van de structuur van een molecuul kan het een ander pad naar kristallisatie sturen
- Elke stap van cycloadditiereacties op het oppervlak visualiseren
- Zeer efficiënte waterstofgasproductie met behulp van zonlicht, water en hematiet
- Wetenschappers gebruiken coöperatieve actie van een ligand-tegenionsysteem voor duurzame etherproductie
- Top 5 Groene Mythen
- Hoe kunnen we de schade door klimaatverandering aan de wereldeconomie beperken?
- Vulkanische activiteit pauzeert bij de krater van Hawaï, maar meer uitbarstingen verwacht
- Is het een vogel? Is het een vliegtuig?
- Onderzoek toont aan hoe parkachtige tsunami-verdedigingswerken een duurzaam alternatief kunnen bieden voor torenhoge zeeweringen
Hoofdlijnen
- Hoe lucide dromen werkt
- Hoe noteer ik een Karyotype
- Oceaanmonumenten worden geconfronteerd met mogelijk verlies van bescherming
- Genetische studie van onsterfelijke kwallen kan de levensduur helpen verklaren
- Het co-evoluerende web van het leven als een netwerk begrijpen
- Onvolledige dominantie: definitie, uitleg en voorbeeld
- BigH1 - de belangrijkste histon voor mannelijke vruchtbaarheid
- Welke organen helpen het menselijk lichaam zich te ontdoen van verspillingen geproduceerd door cellen?
- Maïsgenetica geeft inzicht in de gewassen die historisch zijn verspreid over Amerika




 Onderzoek onderzoekt de economische impact van bodembedekkers op lange termijn
Onderzoek onderzoekt de economische impact van bodembedekkers op lange termijn- Nieuwigheid in de wetenschap - echte noodzaak of afleidende obsessie?
- Lipoproteïnen gedragen zich bijna als een kleine klittenbandbal
- Waarom hebben we geen elektrische vliegtuigen?
- Bakken Soda gebruiken om alkalisch Water
- De spin in grafeen kan worden uitgeschakeld
- Fasen in de levenscyclus van een ster
- Driedimensionale nanomagneten voor de computer van morgen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
