Wetenschap
Het voorspellen van de rij-persoonlijkheden van mensen
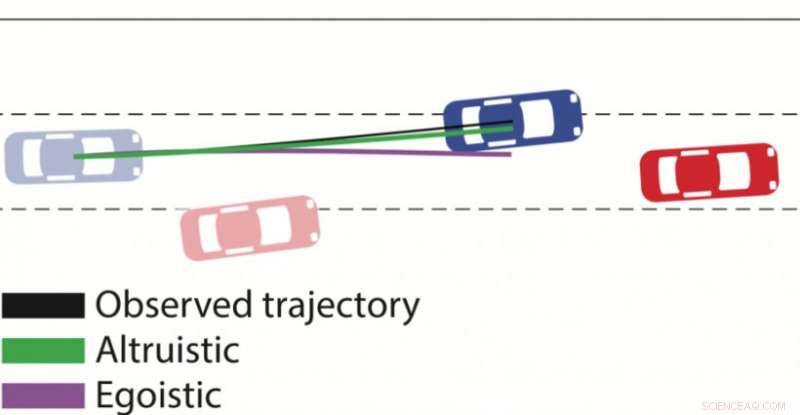
In scenario's voor het samenvoegen van rijstroken, een aan het MIT ontwikkeld systeem zou onderscheid kunnen maken tussen altruïstisch en egoïstisch rijgedrag. Krediet:Massachusetts Institute of Technology
Zelfrijdende auto's komen eraan. Maar voor al hun fraaie sensoren en ingewikkelde gegevensverwerkingscapaciteiten, zelfs de meest geavanceerde auto's missen iets dat (bijna) elke 16-jarige met een leervergunning heeft:sociaal bewustzijn.
Hoewel autonome technologieën aanzienlijk zijn verbeterd, ze zien de chauffeurs om hen heen uiteindelijk nog steeds als obstakels bestaande uit enen en nullen, in plaats van mensen met specifieke bedoelingen, motivaties, en persoonlijkheden.
Maar onlangs heeft een team onder leiding van onderzoekers van MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) onderzocht of zelfrijdende auto's kunnen worden geprogrammeerd om de sociale persoonlijkheden van andere bestuurders te classificeren. zodat ze beter kunnen voorspellen wat verschillende auto's zullen doen - en, daarom, er veiliger tussen kunnen rijden.
In een nieuwe krant de wetenschappers integreerden tools uit de sociale psychologie om rijgedrag te classificeren met betrekking tot hoe egoïstisch of onbaatzuchtig een bepaalde bestuurder is.
specifiek, ze gebruikten iets dat sociale waardeoriëntatie (SVO) wordt genoemd, die de mate vertegenwoordigt waarin iemand egoïstisch ("egoïstisch") versus altruïstisch of coöperatief ("prosociaal") is. Het systeem schat vervolgens de SVO's van bestuurders om realtime rijtrajecten voor zelfrijdende auto's te creëren.
Hun algoritme testen op de taken van het samenvoegen van rijstroken en het maken van onbeschermde bochten naar links, het team toonde aan dat ze het gedrag van andere auto's met een factor 25 beter konden voorspellen. Bijvoorbeeld, in de linksaf-simulaties wist hun auto te wachten wanneer de naderende auto een egoïstischere bestuurder had, en om vervolgens de bocht te maken wanneer de andere auto prosocialer was.
Hoewel het nog niet robuust genoeg is om op echte wegen te worden geïmplementeerd, het systeem kan enkele intrigerende use-cases hebben, en niet alleen voor de auto's die zelf rijden. Stel dat u een mens bent die langsrijdt en er plotseling een auto in uw dode hoek komt - het systeem kan u in de achteruitkijkspiegel waarschuwen dat de auto een agressieve bestuurder heeft, zodat u dienovereenkomstig kunt aanpassen. Het zou ook zelfrijdende auto's in staat kunnen stellen om daadwerkelijk meer mensachtig gedrag te vertonen dat voor menselijke bestuurders gemakkelijker te begrijpen is.
"Werken met en rond mensen betekent het uitzoeken van hun bedoelingen om hun gedrag beter te begrijpen, " zegt promovendus Wilko Schwarting, wie was hoofdauteur van het nieuwe artikel dat deze week in het laatste nummer van de Proceedings van de National Academy of Sciences . "De neiging van mensen om samen te werken of competitief te zijn, vloeit vaak over in hoe ze zich gedragen als chauffeurs. In dit artikel wordt we probeerden te begrijpen of dit iets was dat we echt konden kwantificeren."
Tot de co-auteurs van Schwarting behoren MIT-professoren Sertac Karaman en Daniela Rus, evenals onderzoekswetenschapper Alyssa Pierson en voormalig CSAIL-postdoc Javier Alonso-Mora.
Een centraal probleem met de zelfrijdende auto's van vandaag is dat ze zijn geprogrammeerd om aan te nemen dat alle mensen op dezelfde manier handelen. Dit betekent dat, onder andere, ze zijn vrij conservatief in hun besluitvorming bij vierrichtingsstops en andere kruispunten.
Hoewel deze voorzichtigheid de kans op dodelijke ongevallen verkleint, het creëert ook knelpunten die frustrerend kunnen zijn voor andere chauffeurs, en niet te vergeten moeilijk voor hen om te begrijpen. (Dit is misschien de reden waarom de meeste verkeersincidenten te maken hebben met achterop rijden door ongeduldige chauffeurs.)
"Het creëren van meer menselijk gedrag in autonome voertuigen (AV's) is van fundamenteel belang voor de veiligheid van passagiers en omliggende voertuigen, omdat door zich op een voorspelbare manier te gedragen mensen de acties van de AV kunnen begrijpen en er adequaat op kunnen reageren, ', zegt Schwarting.
Om het sociale bewustzijn van de auto te vergroten, het CSAIL-team combineerde methoden uit de sociale psychologie met speltheorie, een theoretisch kader voor het bedenken van sociale situaties tussen concurrerende spelers.
Het team modelleerde wegscenario's waarbij elke bestuurder zijn eigen nut probeerde te maximaliseren en analyseerde hun "beste reacties" op basis van de beslissingen van alle andere agenten. Gebaseerd op dat kleine bewegingsfragment van andere auto's, het algoritme van het team zou dan het gedrag van de omringende auto's kunnen voorspellen als coöperatief, altruïstisch, of egoïstisch - de eerste twee groeperen als 'prosociaal'. De scores van mensen voor deze kwaliteiten liggen op een continuüm met betrekking tot de mate waarin een persoon zorg voor zichzelf toont versus zorg voor anderen.
In de scenario's voor samenvoegen en links afslaan, de twee uitkomstopties waren om ofwel iemand in je rijstrook te laten opgaan ("prosociaal") of niet ("egoïstisch"). De resultaten van het team toonden aan dat, niet verrassend, fuserende auto's worden als concurrerender beschouwd dan niet-samenvoegende auto's.
Het systeem is getraind om te proberen beter te begrijpen wanneer het gepast is om ander gedrag te vertonen. Bijvoorbeeld, zelfs de meest eerbiedige menselijke chauffeurs weten dat bepaalde soorten acties, zoals het wisselen van rijstrook in druk verkeer, een moment van assertiviteit en besluitvaardigheid vereisen.
Voor de volgende fase van het onderzoek, het team is van plan om hun model toe te passen op voetgangers, fietsen, en andere agenten in rijomgevingen. In aanvulling, ze zullen andere robotsystemen onderzoeken die tussen mensen werken, zoals huishoudelijke robots, en het integreren van SVO in hun voorspellings- en besluitvormingsalgoritmen. Pierson zegt dat het vermogen om SVO-verdelingen rechtstreeks te schatten op basis van waargenomen beweging, in plaats van in laboratoriumomstandigheden, belangrijk zal zijn voor velden die veel verder gaan dan autonoom rijden.
"Door rijdende persoonlijkheden te modelleren en de modellen wiskundig op te nemen met behulp van de SVO in de besluitvormingsmodule van een robotauto, dit werk opent de deur naar veiliger en meer naadloos delen van wegen tussen door mensen aangedreven en door robots aangedreven auto's, ' zegt Rus.
Dit verhaal is opnieuw gepubliceerd met dank aan MIT News (web.mit.edu/newsoffice/), een populaire site met nieuws over MIT-onderzoek, innovatie en onderwijs.
 Wat is het verschil tussen witte en groene schimmels?
Wat is het verschil tussen witte en groene schimmels? - Opnieuw heet:2020 vestigt opnieuw een wereldwijd temperatuurrecord
- Hoe dik of dun is de atmosfeer van de aarde?
- 20% minder water in Murray-Darling-rivieren dan verwacht onder Basin Plan
- Stroombugs suggereren herstel van vervuiling in North York Moors
Hoofdlijnen
- Hoe wordt ureum gemaakt?
- Wanneer is lachen een medisch symptoom?
- De Stoned Ape-hypothese:hebben paddo's de menselijke evolutie beïnvloed?
- Hoe kunnen kinderen van dezelfde ouders er zo verschillend uitzien?
- De primaire primaire productiviteit berekenen
- Coole ideeën voor een 3D-model van DNA
- Sumatraanse neushoorns zijn nooit hersteld van verliezen tijdens het Pleistoceen, genoom bewijs toont
- Welke koninkrijken zijn heterotroof en autotroof?
- Kikker en menselijke bloedcellen vergelijken en identificeren
- Hulpmiddelen voor gezichtsherkenning verbeteren met generatieve gezichtsaanvulling

- Podcasters vinden niche in de Arabische wereld

- Onderzoekers breiden microchipcapaciteit uit met nieuwe 3D-inductortechnologie

- Rechtbank in Tokio wijst verzoek om borgtocht ex-Nissan-chef Ghosn af

- Tesla CEO Elon Musk beschimpt de Amerikaanse financiële regelgevende instantie


 Waarom worden de lanceringen van de spaceshuttle zo vaak vertraagd?
Waarom worden de lanceringen van de spaceshuttle zo vaak vertraagd? - Nieuw proces zet biomassaafval om in bruikbare elektronische apparaten
- De zon blokkeren om de opwarming van de aarde onder controle te houden
- Technologie voor het produceren van aluminium matrixcomposieten uit nieuwe grondstoffen
- Rosetta-ruimtevaartuig detecteert onverwachte ultraviolette aurora bij een komeet
- De verschillen tussen een universum, Galaxy & zonnestelsel
- Dankzij een nieuwe benadering in de organische chemie kan boor met hoge precisie aan moleculen worden toegevoegd
- Airbnb gaat alle 7 miljoen accommodaties verifiëren om het vertrouwen te verbeteren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | Dutch | Danish | Norway | Spanish | German |

-
Wetenschap © https://nl.scienceaq.com
