Wetenschap
Rebellenrobot helpt onderzoekers de samenwerking tussen mens en machine te begrijpen
Krediet:Universiteit van Bristol
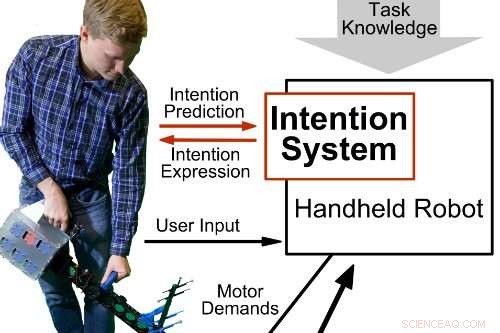
In een nieuwe draai aan mens-robotonderzoek, computerwetenschappers van de Universiteit van Bristol hebben een handrobot ontwikkeld die gebruikers eerst voorspelt en vervolgens frustreert door in opstand te komen tegen hun plannen, daarmee blijk geven van een begrip van de menselijke bedoeling.
In een steeds technologischer wordende wereld, samenwerking tussen mens en machine is een essentieel aspect van automatisering. Dit nieuwe onderzoek toont aan dat het opzettelijk frustreren van mensen deel uitmaakt van het proces van het ontwikkelen van robots die beter samenwerken met gebruikers.
Het team van Bristol heeft intelligente, handrobots die taken uitvoeren in samenwerking met de gebruiker. In tegenstelling tot conventionele elektrische gereedschappen, die niets weten van de taken die ze uitvoeren en volledig onder controle zijn van gebruikers, de handrobot heeft kennis van de taak en kan helpen door middel van begeleiding, nauwkeurig afgestemde beweging en beslissingen over takenreeksen.
Hoewel dit helpt om taken sneller en nauwkeuriger uit te voeren, gebruikers kunnen geïrriteerd raken als de beslissingen van de robot niet in lijn zijn met hun eigen plannen.
Laatste onderzoek in deze ruimte door Ph.D. kandidaat Janis Stolzenwald en professor Walterio Mayol-Cuevas, van de afdeling Computerwetenschappen van de Universiteit van Bristol, onderzoekt het gebruik van intelligente tools die hun beslissingen kunnen beïnvloeden in reactie op de intentie van gebruikers.
Dit onderzoek is een nieuwe en interessante draai aan het onderzoek tussen mens en robot, omdat het tot doel heeft eerst te voorspellen wat gebruikers willen en vervolgens tegen deze plannen in te gaan.
Professor Mayol-Cuevas zei:"Als je gefrustreerd bent over een machine die bedoeld is om je te helpen, dit is gemakkelijker te identificeren en te meten dan de vaak ongrijpbare signalen van samenwerking tussen mens en robot. Als de gebruiker gefrustreerd is wanneer we de robot instrueren om in opstand te komen tegen hun plannen, we weten dat de robot begreep wat ze wilden doen."
"Net zoals kortetermijnvoorspellingen van elkaars acties essentieel zijn voor succesvol menselijk teamwerk, ons onderzoek toont aan dat het integreren van deze mogelijkheid in coöperatieve robotsystemen essentieel is voor een succesvolle samenwerking tussen mens en machine."
Voor de studie, onderzoekers gebruikten een prototype dat de blik van de gebruiker kan volgen en kortetermijnvoorspellingen kan doen over beoogde acties door middel van machine learning. Deze kennis wordt vervolgens gebruikt als basis voor de beslissingen van de robot, zoals waar te gaan.
Het Bristol-team trainde de robot in het onderzoek met behulp van een set van meer dan 900 trainingsvoorbeelden van een pick-and-place-taak die door deelnemers werd uitgevoerd.
Kern van dit onderzoek is de beoordeling van het intentie-voorspellingsmodel. De onderzoekers testten de robot voor twee gevallen:gehoorzaamheid en rebellie. De robot is geprogrammeerd om de voorspelde intentie van de gebruiker te volgen of niet te gehoorzamen. Het kennen van de doelen van de gebruiker gaf de robot de kracht om in opstand te komen tegen hun beslissingen. Het verschil in frustratiereacties tussen de twee condities diende als bewijs voor de nauwkeurigheid van de voorspellingen van de robot, waardoor het intentie-voorspellingsmodel wordt gevalideerd.
Janis Stolzenwald, een doctoraat student gesponsord door de German Academic Scholarship Foundation en de Britse EPSRC, voerde de gebruikersexperimenten uit en identificeerde nieuwe uitdagingen voor de toekomst. Hij zei:"We ontdekten dat het intentiemodel effectiever is wanneer de blikgegevens worden gecombineerd met taakkennis. Dit roept een nieuwe onderzoeksvraag op:hoe kan de robot deze kennis ophalen? We kunnen ons voorstellen dat we leren van demonstratie of een ander mens betrekken bij de taak."
Ter voorbereiding op deze nieuwe uitdaging, de onderzoekers onderzoeken momenteel gedeelde controle, interactie en nieuwe toepassingen binnen hun studies over samenwerken op afstand via de handrobot. Een onderhoudstaak dient als gebruikersexperiment, waarbij een gebruiker van een handrobot wordt geholpen door een expert die de robot op afstand bestuurt.
Het onderzoek bouwt voort op de handrobot die is ontworpen en gebouwd door voormalig Ph.D. student Austin Gregg-Smith, en die beschikbaar is als een open-source ontwerp via de site van de onderzoeker op www.handheldrobotics.org.
 Vijf manieren om koolstofdioxide van vervuiling om te zetten in een waardevol product
Vijf manieren om koolstofdioxide van vervuiling om te zetten in een waardevol product- Geografie gebruiken om landbeleid en -beheer te verkennen
- Meer energie nodig om klimaatverandering het hoofd te bieden
- De klodder abnormale omstandigheden verhoogde de ozonniveaus in de westerse VS
- Illegale houtkap op steile hellingen brengt levens in gevaar
Hoofdlijnen
- Geheugenverlies en hoofdtrauma
- Hoe branden het gezicht van de toendra veranderen
- De soorten elektroforese
- Kenmerken van nucleïnezuren
- Genontdekking kan wereldwijde tarwe-epidemie stoppen
- Basisvereisten voor groei in prokaryoten en eukaryoten
- Genetische studie onthult evolutionaire geschiedenis van dingo's
- Kwam Eiwit, DNA of RNA als eerste?
- Dit is wat de wetenschap zegt over dierengevoel
- Zalm bezorgd via hyperloop en post per drone?

- Sms'en of e-mailen:wat geeft u een veiligere communicatie?

- Zijn wervingsalgoritmen eerlijk? Ze zijn te ondoorzichtig om te vertellen, studie vondsten
- Franse uitvinder zweeft op flyboard over Engels Kanaal

- Russische MTS betaalt $ 850 miljoen in Amerikaanse graftzaak als dochter van Islam Karimovs


 Cassini verkent ringachtige formaties rond Titans-meren
Cassini verkent ringachtige formaties rond Titans-meren- Verschillende soorten microscopen in Biology
- Van roest tot rijkdom:computers worden groen - of is dat bruin?
- Visuele homing voor micro-luchtvaartuigen met behulp van vertrouwdheid met de scène
- Voors en tegens van Forensic Science
- Verbergen of opgegeten worden, urinechemicaliën vertellen modderkrabben
- Op video vastgelegd:DNA-nanobuisjes bouwen een brug tussen twee moleculaire posten
- Wind- en zonne-energie kunnen aan viervijfde van de Amerikaanse elektriciteitsvraag voldoen, studie vondsten
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
