Wetenschap
Een raamwerk voor diepteschatting en relatieve lokalisatie in grondrobots
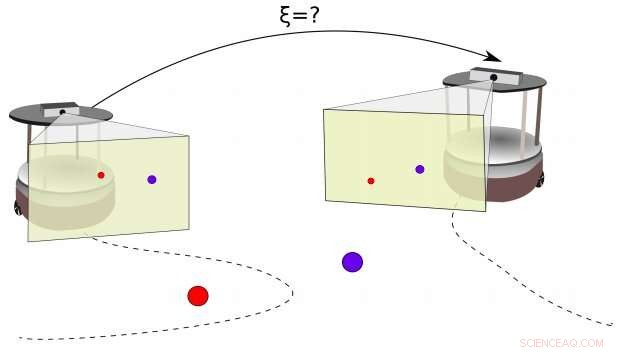
Een weergave van het probleem dat in de recente studie is behandeld. Twee robots observeren een paar 3D-punten. De onderzoekers stellen een pijplijn voor om tegelijkertijd de 3D-diepte van de twee 3D-punten te schatten en tegelijkertijd hun relatieve pose te verkrijgen. Krediet:Rodrigues et al.
Onderzoekers van de Universiteit van Porto in Portugal en KTH Royal Institute of Technology in Zweden hebben onlangs een raamwerk ontwikkeld dat de diepte en relatieve houding kan schatten van twee grondrobots die samenwerken aan een bepaalde taak. Hun kader, geschetst in een paper dat vooraf is gepubliceerd op arXiv, zou kunnen helpen om de prestaties van meerdere robots te verbeteren bij taken waarbij exploratie betrokken is, manipulatie, Dekking, bemonsteren en patrouilleren, evenals in zoek- en reddingsmissies.
In recente jaren, onderzoekers hebben een groeiend aantal onderzoeken uitgevoerd om oplossingen te ontwikkelen om meerdere robots effectief te coördineren binnen een gedecentraliseerde architectuur. Om een bepaalde taak als groep effectief aan te pakken, individuele robots binnen een zwerm of formatie moeten zich op zijn minst gedeeltelijk bewust zijn van de houding van andere agenten in hun omgeving.
Deze pose-gerelateerde gegevens, bekend als relatieve pose-informatie, stelt een agent in staat om de functie van een bepaald doel te optimaliseren, herplan zijn trajecten en vermijd botsingen met andere robots. In sommige real-world instellingen, echter, het kan voor agenten moeilijk zijn om nauwkeurige schattingen van de relatieve pose te maken. Bijvoorbeeld, tijdens extreme missies in afgelegen of afgelegen gebieden, robots kunnen problemen ondervinden met communicatiekanalen en met zeer nauwkeurige positionerings- of motion capture-systemen.
Met dit in gedachten, het team van onderzoekers van de Universiteit van Porto en KTH wilde een raamwerk ontwikkelen dat de 3D-diepteschatting en relatieve pose-schatting van grondrobots die samenwerken aan een gemeenschappelijk doel zou kunnen verbeteren. Ze richtten zich specifiek op een scenario waarbij twee autonome grondvoertuigen door een onbekende omgeving navigeren, beide uitgerust met perspectiefcamera's.
Pijplijn van het door de onderzoekers voorgestelde raamwerk. Krediet:Rodrigues et al.
"Het diepteschattingsprobleem is gericht op het herstellen van de 3D-informatie van de omgeving, " leggen de onderzoekers uit in hun paper. "Het relatieve lokalisatieprobleem bestaat uit het schatten van de relatieve houding tussen twee robots, door elkaars pose te voelen of informatie te delen over de waargenomen omgeving."
De meeste bestaande oplossingen voor diepteschatting en relatieve lokalisatie in robots werken door het analyseren van een niet-verbonden set gegevens, zonder rekening te houden met de chronologische volgorde van de gebeurtenissen. De door de onderzoekers voorgestelde aanpak, anderzijds, beschouwt informatie die door de twee robots afzonderlijk via hun camera's is verzameld en combineert dit vervolgens om de relatieve houding tussen hen te berekenen. Diepteschattingsinformatie verzameld door de twee agenten en invoercommando's worden toegevoerd aan een Extended Kalman Filter (EKF), die is ontworpen om deze gegevens te verwerken en de relatieve houding tussen de robots te schatten.
"Terwijl eerdere oplossingen voor dit probleem een set van twee of meer afbeeldingen uit de omgeving overwegen of een speciale vlootconfiguratie gebruiken (bijv. De robots bevinden zich in elkaars gezichtsveld of hebben het vermogen om de peilingsinformatie over elkaars posities), we stellen een raamwerk voor dat een reeks gemeenschappelijke observaties van de omgeving deelt in het respectievelijke lokale frame van elke robot (3D-puntkenmerken worden gebruikt), ', schrijven de onderzoekers.
De onderzoekers evalueerden hun raamwerk in een reeks gesimuleerde scenario's, met behulp van twee grondrobots genaamd TurtleBots. Hun bevindingen suggereren dat hun aanpak in feite effectieve diepteschatting en relatieve lokalisatie mogelijk maakt voor twee robots die samenwerken aan een taak. In hun toekomstige werk, de onderzoekers zijn van plan om ook de actieve besturing van twee robots te overwegen in hetzelfde scenario dat in hun recente studie is onderzocht, evenals andere aspecten die relevant zijn voor hun coördinatie.
© 2019 Wetenschap X Netwerk
 Olie- en waterlagen scheiden
Olie- en waterlagen scheiden - Hoe kan pH uw vissen beïnvloeden?
- Mechanisme dat verantwoordelijk is voor het maken van gehalogeneerde organische verbindingen bij fracken ontdekt
- Nieuwe onderzoeksresultaten kunnen leiden tot veiligere en krachtigere lithium-ionbatterijen
- Wetenschappers beschrijven het verloop van reacties in tweelaagse dunne metaalfilms
- Haaien op de lijst met bedreigde diersoorten
- Het wanneer en waarom van de opwarming van de aarde in het noordwesten van Japan
- Nieuwe uitlaatgasmeting registreert voor het eerst ultrafijne vervuilende deeltjes
- Wetenschappers brengen enorme onderzeese zoetwateraquifers in kaart voor het noordoosten van de VS
- De aarde had de koelste februari ooit sinds 2014
Hoofdlijnen
- Synthetische seks in gist belooft veiligere medicijnen voor mensen
- Kill-schakelaars voor gemanipuleerde microben die schurkenstaten zijn geworden
- Morfogenese en de ontwikkeling van levende vormen
- Naarmate het klimaat warmer wordt, muizen morph
- Vitamine E-ontdekking in maïs kan leiden tot meer voedzame gewassen
- Welke genen en genomen onthullen over onze gezondheid
- Hoe Ninja-deeltjes werken
- Wat zijn de vier eukaryotische koninkrijken?
- Is het kennen van je volledige genoom een recht of een voorrecht?
- Noordzeerotsen kunnen fungeren als grootschalige opslagplaats voor hernieuwbare energie

- Uber schorst 240 gebruikersaccounts wegens mogelijk viruscontact

- Zwitserse privacywaakhond zoekt details over Facebook-valuta

- Nieuwe Samsung-telefoon:innovatie draait om opvouwbaar scherm

- Robots sneller grip geven


 Scholen heropenen in New Delhi met dalende luchtvervuiling
Scholen heropenen in New Delhi met dalende luchtvervuiling- Kogelvistoxine maken in een kolf
- Waarom heeft de evolutie ons niet het vermogen gegeven om zoet water te ruiken?
- Robochef:Sony kookt nieuwe AI-eenheid voor voedselrevolutie
- Voorbeelden van Math Games
- Vormgecodeerde dynamische assemblage van mobiele micromachines
- Klimaatverandering:steile opwarmingscurve voor Europa
- Great Southern Reef verliest enorm leefgebied voor zeewier door opwarming van de oceaan
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
