Wetenschap
Een evolutionaire robotica-aanpak voor samenwerking tussen robotzwerm
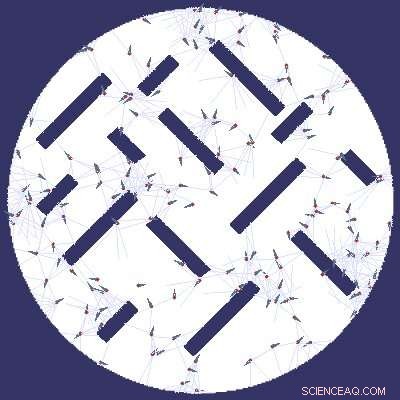
Een van de drie overwogen leeromgevingen, namelijk voortbeweging. in voortbeweging, agenten leren navigeren in de omgeving en vermijden obstakels (donkere rechthoeken) en andere agenten. Krediet:Amine Boumaza.
recombinatie, de herschikking van genetisch materiaal als gevolg van paring of combinatie van DNA-segmenten van verschillende organismen, heeft tal van evolutionaire voordelen. Bijvoorbeeld, het stelt organismen in staat schadelijke mutaties uit hun genomen te verwijderen en meer bruikbare mutaties aan te nemen.
Amine Boumaza, een onderzoeker aan de Université de Lorraine, heeft onlangs geprobeerd dit proces toe te passen op online belichaamde evolutionaire robotica, een gebied van robotica dat zich richt op het repliceren van evolutietheorieën in robots. In zijn krant, gepubliceerd in het tijdschrift GECCO '19 Proceedings of the Genetic and Evolutionary Computation Conference, hij ontwikkelde een recombinatie-operator geïnspireerd door evolutie en trainde deze op drie taken die samenwerking tussen meerdere robots vereisen.
"Mijn onderzoek valt in het bredere onderwerp AI, en meer specifiek, begrijpen hoe we agenten kunnen ontwerpen die kunnen leren interessante taken uit te voeren, " zei Boumaza. "Dit onderzoeksonderwerp is niet nieuw, maar vrij oud, en het kreeg de laatste tijd veel aandacht vanwege de indrukwekkende resultaten van deep learning. In mijn geval, Ik ben meer geïnteresseerd in zwermrobotica, waarbij het doel is om een groot aantal kleine robots te laten samenwerken om een taak op te lossen en zich aan te passen aan veranderingen in hun omgeving."
Gefascineerd door de evolutionaire strategieën, vooral recombinatie, die levende organismen beter uitrusten om de uitdagingen van het leven aan te gaan, Boumaza ging onderzoeken of soortgelijke mechanismen kunnen worden toegepast op robotica-benaderingen. Zijn hypothese was dat indien succesvol gerepliceerd in robots, recombinatie zou hun prestaties en efficiëntie verhogen.
"Als we het hebben over robotagenten, we nemen over het algemeen een fysieke entiteit aan die in een omgeving is belichaamd (bijvoorbeeld een stofzuigerrobot in een kamer), Boumaza zei. "Deze agent neemt zijn omgeving waar met behulp van een reeks sensoren (obstakelsensoren, camera, enzovoort.), die het een soort representatie van zijn omgeving kan geven. Het middel kan ook in de omgeving werken met behulp van effectoren (motoren, armen, borstel, enzovoort.). Deze acties zijn het resultaat van een berekening die de output is van wat we gewoonlijk een controller noemen (d.w.z. een soort beslissingsprogramma)."

Een van de drie overwogen leeromgevingen, namelijk item collectie. In itemverzameling, agenten moeten zoveel mogelijk items (rode stippen) verzamelen. Krediet:Amine Boumaza.
Een controller is in wezen een programma dat de waarnemingen verwerkt die een robot via zijn sensoren heeft verkregen en commando's naar zijn effectoren stuurt. In het geval van een robotstofzuiger, bijvoorbeeld, een verwerkingsverantwoordelijke zou informatie over zijn omgeving verwerken, detecteren of er stof voor ligt, produceer vervolgens outputs waardoor de robot het vacuüm activeert en verder gaat om het stof op te zuigen.
"Een volgende stap zetten, we kunnen ook rekening houden met meerdere agenten die in dezelfde omgeving kunnen evolueren, Boumaza zei. "Het ontwerpen van controllers voor elke agent in dergelijke instellingen is een zeer moeilijk probleem waarvoor nog geen efficiënte techniek bestaat. In dit geval, we kunnen er maar weinig hebben (bijv. 10 tot 100) complexe robots, of veel zeer eenvoudige robots (bijv. honderden) die op elkaar inwerken op manieren die meestal geïnspireerd zijn op het gedrag van insecten; dat is wat we zwermrobotica noemen."
Bij het ontwikkelen van een robot die een bepaalde taak effectief kan voltooien, onderzoekers moeten een controller ontwerpen die is afgestemd op die specifieke taak. Als de omgeving waarin de robot moet werken eenvoudig is, het ontwerpen van deze controller kan vrij eenvoudig zijn, maar de meeste keren, dit is niet het geval.
Dit wordt nog moeilijker, zo niet onmogelijk, wanneer rekening wordt gehouden met meerdere robots die in een bepaalde omgeving samenwerken. De belangrijkste reden hiervoor is dat een menselijke ontwikkelaar onmogelijk alle situaties kan voorspellen die elke robot zal tegenkomen, evenals de meest effectieve acties om elk van deze situaties aan te pakken. Gelukkig, in recente jaren, vooruitgang in machine learning heeft interessante nieuwe mogelijkheden geopend voor robotica-onderzoek, waardoor ontwikkelaars tools kunnen gebruiken die continu leren mogelijk maken, in wezen de controller trainen om in de loop van de tijd met tal van situaties om te gaan.
"Een manier om een controller op zo'n manier te ontwerpen, is door evolutionaire algoritmen te gebruiken, die, globaal gezegd, probeer de natuurlijke evolutie van soorten na te bootsen om robotagentcontrollers te ontwikkelen, " zei Boumaza. "Het is een iteratief proces waarbij, naarmate dieren zich beter aanpassen aan hun omgeving, de controller wordt beter in het oplossen van een taak. Het doel is niet om natuurlijke evolutie te simuleren, maar haal er liever wat inspiratie uit."
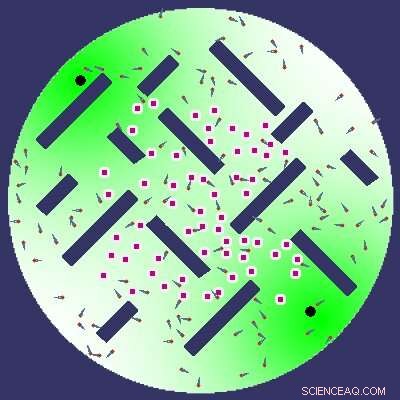
Een van de drie overwogen leeromgevingen, namelijk foerageren. Bij foerageren moeten agenten items verzamelen en terugbrengen naar het nest (een van de twee zwarte cirkels). De groen gekleurde vloer is een feromoonspoor dat een gevoel van richting toevoegt, het is sterk geconcentreerd op de nestlocaties en minder geconcentreerd verder weg. Krediet:Amine Boumaza.
Evolutionaire robotica is slechts een van de vele technieken die onderzoekers kunnen gebruiken om robotcontrollers te ontwerpen. In recente jaren, echter, evolutionaire benaderingen hebben aan populariteit gewonnen, met een groeiend aantal onderzoeken gericht op het repliceren van evolutionaire strategieën die zijn waargenomen bij dieren en mensen.
"Evolutionaire robotica heeft enkele voordelen, zoals het feit dat we niet hoeven te specificeren hoe de taak moet worden opgelost (deze wordt ontdekt/aangeleerd door het algoritme), maar hoeft alleen een manier te specificeren om te meten hoe goed de taak wordt uitgevoerd, " zei Boumaza. Het heeft ook enkele nadelen, aangezien het een zeer langzaam en rekenintensief proces is, dat kan heel moeilijk zijn om uit te voeren op echte robots. In aanvulling, deze benaderingen zijn doorgaans erg gevoelig voor prestatiemetingen, omdat ze het door de agenten geleerde gedrag conditioneren."
Boumaza, net als andere onderzoekers in het veld, heeft geprobeerd nieuwe benaderingen te ontwikkelen om de tekortkomingen van bestaande evolutionaire robotica-technieken te verhelpen. In zijn recente studie, hij stelde specifiek het gebruik van een nieuwe "paringsoperator" voor, geïnspireerd door recombinatie, die de convergentiesnelheid in robotsimulaties kan verbeteren. Dit is een opmerkelijke prestatie, omdat het uiteindelijk de tijd kan verkorten die nodig is om een benadering van simulaties naar echte robots over te brengen.
Hij paste zijn recombinatie-operator toe op drie collectieve robottaken:voortbeweging, item verzamelen en item foerageren. Vervolgens vergeleek hij de prestatie die werd bereikt met behulp van een puur mutatieve versie van zijn algoritme met die van verschillende recombinatie-operators. De resultaten verzameld in zijn experimenten suggereren dat, indien correct ontworpen, recombinatiestrategieën kunnen in feite de aanpassing van een zwerm robots verbeteren in alle taken die hij overwoog.
In de toekomst, de nieuwe evolutionaire robotica-aanpak die hij voorstelde, zou kunnen worden gebruikt om de prestaties en het aanpassingsvermogen van robots te verbeteren bij taken waarvoor samenwerking tussen meerdere agenten vereist is. Ondertussen, echter, Boumaza is van plan zijn algoritme te testen op nieuwe taken, om te bepalen of de verbetering die hij constateerde in de drie taken waarop hij zich concentreerde, nog steeds standhoudt.
"Het zou ook interessant zijn om te kijken of mijn aanpak kan worden geïmplementeerd op echte robots, Boumaza zei. "Theoretisch staat niets dat in de weg, behalve dat we een groot aantal fysieke robots hebben en accepteren om met de 'realiteitskloof' om te gaan (d.w.z. wat we in simulatie zien, is meestal niet wat er in werkelijkheid zou gebeuren, vanwege de simulatievereenvoudigingen. Bij zwermrobotica draait alles om cijfers en het falen van een enkele robot mag de zwerm niet hinderen. uiteindelijk, daarom, om de validiteit van deze benadering vast te stellen, moet deze in de praktijk worden getest, op fysieke robots."
© 2019 Wetenschap X Netwerk
 Wat gebeurt er met pyruvaat onder anaërobe omstandigheden?
Wat gebeurt er met pyruvaat onder anaërobe omstandigheden? - Betrouwbare simulatie van polyurethaanschuim
- Onderzoekers stellen een nieuwe benadering voor om heterogene fotosynthese van azoverbindingen te verbeteren
- IJsbestendige coating voor grote constructies is afhankelijk van een prachtige demonstratie van mechanica
- Residu van stabilisator in inkten blijkt de geleidbaarheid in 3D-geprinte elektronica te remmen
Hoofdlijnen
- Voeding door mensen verandert het gedrag en de fysiologie van groene schildpadden op de Canarische Eilanden
- Relatie tussen DNA-basen Genen, eiwitten en eigenschappen
- Beeldstabilisatie bij gewervelde dieren hangt af van contrast tussen objecten
- De circadiane klok bepaalt het tempo van de plantengroei
- Hoe beïnvloedt CO2 de opening van de huidmondjes?
- Vogelgriep:Nederlandse boeren moeten pluimvee binnen houden
- Race om Indonesische krokodil te redden die is getroffen door een bandenketting
- Parasitaire ooginfectie vormt een aanzienlijke bedreiging voor Britse honden, waarschuw experts
- Maatregelen voor welzijn en duurzaamheid heroverwegen van lokale naar mondiale schaal
- Materialen verhoogde capaciteit, efficiëntie kan de lat voor waterstoftechnologie verlagen

- Duitse schietvideo blijft online ondanks hardhandig optreden

- Onderzoekers veranderen plastic waterflessen in prothetische ledematen

- Dubai toont technische reputatie met wereldwijde roboticawedstrijd

- Dit is het soort gegevens dat hackers over u krijgen vanuit ziekenhuizen


 Hydrogels beheersen ontstekingen om genezing te helpen
Hydrogels beheersen ontstekingen om genezing te helpen- Onderzoeker op zoek naar aanwijzingen in het mysterie van de watervoorziening van de Grand Canyons
- De aarde had korst kunnen ondersteunen, leven eerder dan gedacht
- Astronauten kunnen binnenkort brood breken (en bakken) in de ruimte
- Frontliniegevecht:Indonesië verwikkeld in epische strijd tegen junglebranden
- Op het land gebaseerde microben kunnen koraalriffen binnendringen en schaden
- Experimenten met Hand Sanitizer
- Ethiopië begint tweede fase van vullen megadam, woedend Egypte
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | German | Dutch | Danish | Norway | Italian | Swedish |

-
Wetenschap © https://nl.scienceaq.com
