Wetenschap
Springende ruimterobot vliegt als een ruimtevaartuig

Pong spelen met de videogameklassieker SpaceBok. Om de verdwijnende lage zwaartekracht van asteroïden te simuleren, het SpaceBok-team heeft gebruik gemaakt van de vlakste vloer van Nederland – een epoxyvloer van 4,8 x 9 m, gladgestreken tot een totale vlakheid van minder dan 0,8 mm, genaamd de Orbital Robotics Bench for Integrated Technology (ORBIT), onderdeel van ESA's Orbital Robotics and Guidance Navigation and Control Laboratory. SpaceBok werd op zijn kant gelegd, vervolgens bevestigd aan een vrij zwevend platform om nul-G-omstandigheden in twee dimensies te reproduceren. Toen hij van een muur sprong, liet zijn reactiewiel hem halverwege de sprong ronddraaien, hij liet het opnieuw met de voeten landen aan de andere kant van de kamer - alsof het langs een verkleind enkelvoudig laagzwaartekrachtoppervlak sprong. Krediet:ETH Zürich/ZHAW Zürich
Astronauten op de maan sprongen rond, in plaats van gewoon te lopen. De planetaire verkenningsrobot SpaceBok van Zwitserland heeft hun voorbeeld gevolgd, alle vier de poten van de grond lanceren tijdens tests in het technische hart van ESA.
SpaceBok is een viervoetige robot ontworpen en gebouwd door een Zwitsers studententeam van ETH Zürich en ZHAW Zürich. Het wordt momenteel getest met behulp van robotfaciliteiten in ESA's technisch centrum ESTEC in Nederland.
Er wordt gewerkt onder leiding van Ph.D. student Hendrik Kolvenbach van het Robotic Systems Lab van ETH Zürich, momenteel gevestigd bij ESTEC. De robot wordt gebruikt om het potentieel van "dynamisch lopen" te onderzoeken om zich te verplaatsen in omgevingen met een lage zwaartekracht.
Hendrik legt uit:"In plaats van statisch lopen, waarbij ten minste drie poten te allen tijde op de grond blijven, dynamisch lopen zorgt voor gangen met volledige vluchtfasen waarbij alle benen van de grond blijven. Dieren maken gebruik van dynamische gangen vanwege hun efficiëntie, maar tot voor kort, de rekenkracht en algoritmen die nodig zijn voor besturing maakten het een uitdaging om ze op robots te realiseren.
"Voor de omgevingen met een lagere zwaartekracht van de maan, Mars of asteroïden, zo van de grond springen blijkt een zeer efficiënte manier om je te verplaatsen."
"Astronauten die in de een-zesde zwaartekracht van de maan bewegen, namen instinctief het springen over. SpaceBok zou mogelijk tot 2 m hoog kunnen worden in maanzwaartekracht, hoewel een dergelijke hoogte nieuwe uitdagingen met zich meebrengt. Zodra hij van de grond komt, moet de robot met poten zichzelf stabiliseren om weer veilig naar beneden te komen - op dit moment gedraagt hij zich in feite als een mini-ruimtevaartuig, ", zegt teamlid Alexander Dietsche.
"Dus wat we hebben gedaan, is een van de methoden gebruiken die een conventionele satelliet gebruikt om zijn oriëntatie te regelen, een reactiewiel genoemd. Het kan worden versneld en vertraagd om een gelijke en tegengestelde reactie in SpaceBok zelf teweeg te brengen, " legt teamlid Philip Arm uit.
"Aanvullend, De poten van de SpaceBok bevatten veren om energie op te slaan tijdens de landing en deze vrij te geven bij het opstijgen, aanzienlijk verminderen van de energie die nodig is om die sprongen te bereiken, " voegt een ander teamlid toe, Benjamin Zon.
Het team verhoogt langzaam de hoogte van de repetitieve sprongen van de robot, tot 1,3 meter in gesimuleerde maanzwaartekracht tot nu toe.
Er zijn testopstellingen opgezet om verschillende zwaartekrachtomgevingen te simuleren, niet alleen de maanomstandigheden nabootsen, maar ook de zeer lage zwaartekracht van asteroïden. Hoe lager de zwaartekracht, hoe langer de vliegfase kan zijn voor elke robotsprong, maar effectieve controle is nodig voor zowel het opstijgen als het landen.
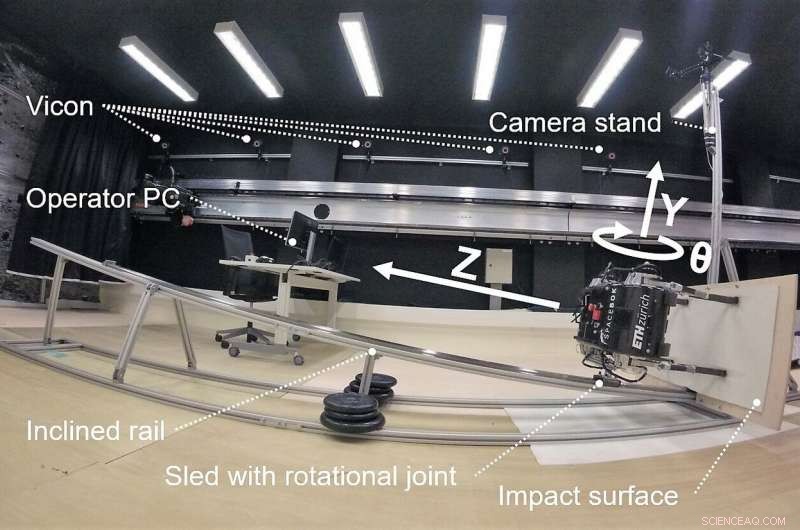
Testopstellingen voor SpaceBok zijn opgezet om verschillende zwaartekrachtomgevingen te simuleren, niet alleen de maanomstandigheden nabootsen, maar ook de zeer lage zwaartekrachten van asteroïden. Hoe lager de zwaartekracht, hoe langer de vliegfase kan zijn voor elke robotsprong, maar effectieve controle is nodig voor zowel het opstijgen als het landen. Krediet:ETH Zürich/ZHAW Zürich
SpaceBok is een viervoetige robot ontworpen en gebouwd door een Zwitsers studententeam van ETH Zürich en ZHAW Zürich. Het wordt momenteel getest met behulp van robotfaciliteiten in het technische centrum van ESA, ESTEC, in Nederland. De robot wordt gebruikt om het potentieel van 'dynamisch lopen' te onderzoeken om zich te verplaatsen in omgevingen met een lage zwaartekracht. Er zijn testopstellingen opgezet om verschillende zwaartekrachtomgevingen te simuleren. SpaceBok kan mogelijk tot 2 m hoog worden in maanzwaartekracht, hoewel een dergelijke hoogte vereist dat de robot zich stabiliseert met een reactiewiel, komt hij weer veilig naar beneden. Krediet:ETH Zürich/ZHAW Zürich
SpaceBok zijwaarts gemonteerd op een vrij zwevend platform met luchtlagers. Om de verdwijnende lage zwaartekracht van asteroïden te simuleren, het SpaceBok-team heeft gebruik gemaakt van de vlakste vloer van Nederland – een epoxyvloer van 4,8 x 9 m, gladgestreken tot een totale vlakheid van minder dan 0,8 mm, genaamd de Orbital Robotics Bench for Integrated Technology (ORBIT), onderdeel van ESA's Orbital Robotics and Guidance Navigation and Control Laboratory. SpaceBok werd op zijn kant gelegd, vervolgens bevestigd aan een vrij zwevend platform om nul-G-omstandigheden in twee dimensies te reproduceren. Toen hij van een muur sprong, liet zijn reactiewiel hem halverwege de sprong ronddraaien, hij liet het opnieuw met de voeten landen aan de andere kant van de kamer - alsof het langs een verkleind enkelvoudig laagzwaartekrachtoppervlak sprong. Krediet:ETH Zürich/ZHAW Zürich 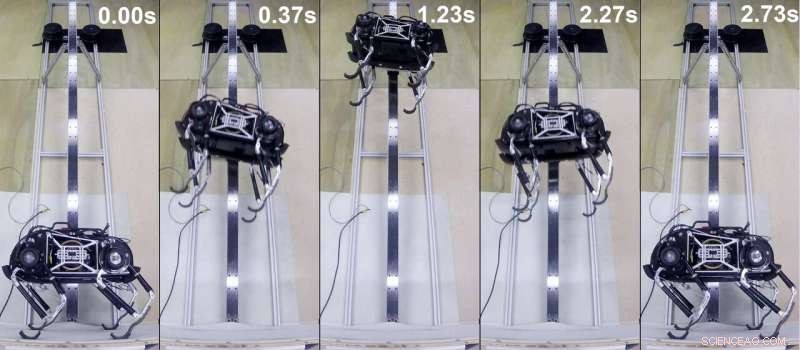
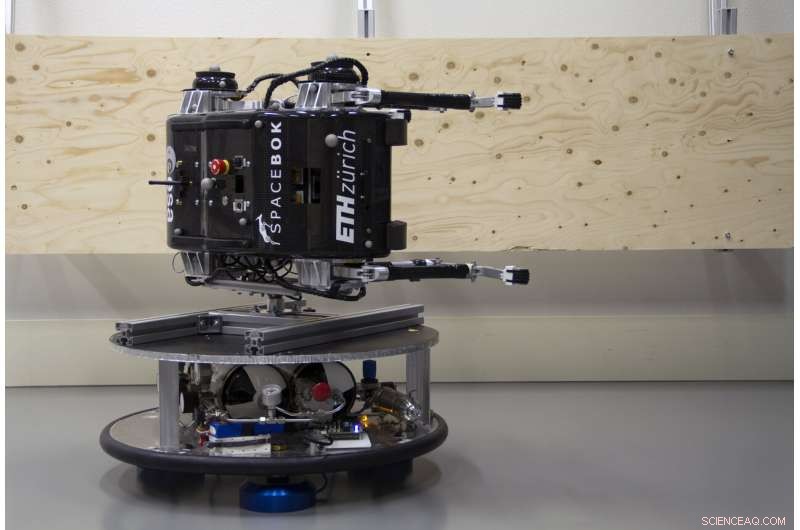
SpaceBok werd op zijn kant gelegd, vervolgens bevestigd aan een vrij zwevend platform om nul-G-omstandigheden in twee dimensies te reproduceren. Toen hij van een muur sprong, liet zijn reactiewiel hem halverwege de sprong ronddraaien, hij liet het opnieuw met de voeten landen aan de andere kant van de kamer - alsof het langs een verkleind enkelvoudig laagzwaartekrachtoppervlak sprong.
Hendrik voegde toe:"Het testen ging zo goed dat we SpaceBok zelfs hebben gebruikt om een live-actiespel van Pong te spelen, de videogameklassieker."
Het testen zal doorgaan in meer realistische omstandigheden, met sprongen over obstakels, heuvelachtig terrein, en realistische grond, uiteindelijk de deur uit.
Hendrik studeert aan ESTEC via ESA's Networking Partnering Initiative, bedoeld om geavanceerd academisch onderzoek voor ruimtetoepassingen te benutten.
 Dat is slim naaien! Wetenschappers vinden draden uit om gassen te detecteren wanneer ze in kleding worden geweven
Dat is slim naaien! Wetenschappers vinden draden uit om gassen te detecteren wanneer ze in kleding worden geweven- Nieuwe techniek verhoogt 3D-printsnelheid met 1, 000 tot 10, 000 keer
- Chemische reacties aansturen via afstandsbediening
- Onderzoekers melden doorbraak in 3D-geprint latexrubber
- Verband tussen het atoomgetal en de chemische reactiviteit van alkali-metalen
- De chemicaliën in blusschuim zijn niet het nieuwe asbest
- Onderzoek onthult bewijs van klimaatverandering in de permafrost van Yukon
- Effecten van grondbewerking en bodembedekking op de graanproductie
- Potentieel klimaatdoelstelling met bio-energie te halen is beperkt
- Plastic planeet:wereldwijd doordringende microplastics volgen
Hoofdlijnen
- Nieuwe biobronnen voor plantaardige peptidehormonen met behulp van technologie voor het bewerken van genen
- Forensische wetenschapsprojecten voor middelbare scholieren
- Wat is een gen?
- Is de Krebs-cyclus aëroob of anaëroob?
- Landen in de Stille Oceaan kunnen door klimaatverandering 50 - 80% van de vis in lokale wateren verliezen
- Wetenschappers lokaliseren jaloezie in de monogame geest
- Natuurbeschermers moeten het Hollywood-effect benutten om dieren in het wild te helpen
- Horzels lokken:wetenschappers ontsluiten seksferomoon van berucht honingbij-roofdier
- Denk aan je eerste herinnering - waarom kun je het je niet eerder herinneren?
- Initiatieven om het Amerikaanse energienetwerk en kernwapensystemen te beschermen

- Denkt u dat uw metadata alleen zichtbaar is voor nationale veiligheidsdiensten? Denk nog eens na

- Moeten we van de Sahara een enorme zonneboerderij maken?

- Nieuw Russisch wapen kan 27 keer sneller dan geluid reizen

- Facebook-baas geconfronteerd met Europees Parlement over dataschandaal


 Wereldrecords van chemici verbeteren het vermogen om CO2 af te vangen
Wereldrecords van chemici verbeteren het vermogen om CO2 af te vangen- Firmware-zwakte breidt rode loper uit voor cold-boot-aanvallen
- Facebook-gebruikers eisen Cambridge Analytica-geheimen in faillissement
- Hoe walvissen te identificeren
- De veiligheid van de bestuurder verbeteren:een gestandaardiseerde kijk op afleidingsmonitoren
- Elektronische zalmsandwich baant de weg naar een kosteneffectief DNA-geheugenapparaat
- Nieuw oppervlak van nanobuisjes belooft tandheelkundige implantaten die sneller genezen en infecties bestrijden
- Snelle kwantumversleuteling kan het toekomstige internet helpen beveiligen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
