Wetenschap
Hondachtige robotsprongen, flips en draaft
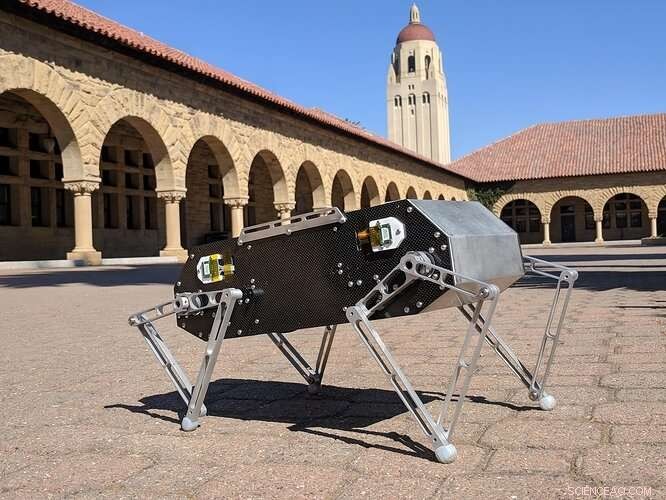
Stanford Doggo Project:een door ODrive aangedreven viervoeter
Door hun eigen draai te geven aan robots die door gecompliceerde landschappen kuieren, Het Extreme Mobility-team van de Stanford Student Robotics-club heeft een vierbenige robot ontwikkeld die niet alleen in staat is om acrobatische trucs uit te voeren en uitdagend terrein te doorkruisen, maar die ook is ontworpen met het oog op reproduceerbaarheid. Iedereen die zijn eigen versie van de robot wil, genaamd Stanford Doggo, kan uitgebreide plannen raadplegen, code en een aanbodslijst die de studenten vrij online beschikbaar hebben gesteld.
"We hadden deze andere viervoetige robots in onderzoek gezien, maar ze waren niet iets dat je naar je eigen lab kon brengen en gebruiken voor je eigen projecten, " zei Nathan Kau, '20, een major werktuigbouwkunde en lead voor Extreme Mobility. "We wilden dat Stanford Doggo deze open source-robot zou zijn die je zelf zou kunnen bouwen met een relatief klein budget."
Terwijl andere vergelijkbare robots tien- of honderdduizenden dollars kunnen kosten en aangepaste onderdelen nodig hebben, de studenten van Extreme Mobility schatten de kosten van Stanford Doggo op minder dan $ 3, 000 - inclusief productie- en verzendkosten - en bijna alle componenten kunnen online worden gekocht zoals ze zijn. Ze hopen dat de toegankelijkheid van deze bronnen een gemeenschap van Stanford Doggo-makers en onderzoekers inspireert die innovatieve en betekenisvolle spin-offs van hun werk ontwikkelen.
Stanford Doggo kan al lopen, draf, dans, hop, springen en af en toe een achterwaartse salto maken. De studenten werken aan een grotere versie van hun creatie - die momenteel ongeveer zo groot is als een beagle - maar zullen een korte pauze nemen om Stanford Doggo te presenteren op de internationale conferentie over robotica en automatisering op 21 mei in Montreal, Canada.
een hop, een sprong en een achterwaartse salto
Om Stanford Doggo repliceerbaar te maken, de studenten hebben het helemaal opnieuw opgebouwd. Dit betekende veel tijd besteden aan het onderzoeken van gemakkelijk bereikbare benodigdheden en het testen van elk onderdeel zoals ze het maakten, zonder afhankelijk te zijn van simulaties.
"Het is ongeveer twee jaar geleden dat we voor het eerst het idee kregen om een viervoeter te maken. We hebben zeker verschillende prototypes gemaakt voordat we daadwerkelijk aan deze iteratie van de hond begonnen te werken, zei Natalie Ferrante, '19, een student werktuigbouwkunde co-terminal en lid van het Extreme Mobility Team. "Het was heel spannend de eerste keer dat we hem aan het lopen kregen."
Stanford Doggo's eerste stappen waren weliswaar waggelen, maar nu kan de robot een consistente gang en een gewenst traject aanhouden, zelfs als het verschillende terreinen tegenkomt. Het doet dit met behulp van motoren die externe krachten op de robot detecteren en bepalen hoeveel kracht en koppel elk been als reactie moet uitoefenen. Deze motoren herberekenen op 8, 000 keer per seconde en zijn essentieel voor de kenmerkende dans van de robot:een springkussen dat verbergt dat het geen veren heeft. In plaats daarvan, de motoren werken als een systeem van virtuele veren, soepel maar parmantig de robot terugkaatsen in de juiste vorm wanneer ze voelen dat hij uit positie is.
Onder de vaardigheden en trucs die het team aan het repertoire van de robot heeft toegevoegd, de studenten waren buitengewoon verrast door het springvermogen. Stanford Doggo op de proef stellen op een (zeer) vroege ochtend in het lab, het team realiseerde zich dat het moeiteloos 2 voet in de lucht opduikt. Door de grenzen van de software van de robot te verleggen, Stanford Doggo kon 3 springen, dan 3½ voet van de grond.
"Dit was toen we ons realiseerden dat de robot, in sommige opzichten, beter presteren dan andere viervoetige robots die in onderzoek worden gebruikt, ook al was het erg goedkoop, ’ herinnert Kau zich.
Vanaf dat moment, de studenten hebben Stanford Doggo geleerd een backflip te maken, maar altijd met opvulling om snel te kunnen experimenteren met vallen en opstaan.
Wat gaat Stanford Doggo nu doen?
Als deze studenten het naar hun zin hebben, de toekomst van Stanford Doggo in handen van de massa.
"We hopen een basissysteem te bieden dat iedereen kan bouwen, " zei Patrick Slade, afgestudeerde student luchtvaart en ruimtevaart en mentor voor Extreme Mobility. "Zeggen, bijvoorbeeld, je wilde werken aan zoek- en reddingsacties; je zou het kunnen uitrusten met sensoren en code op de onze kunnen schrijven waarmee het rotsstapels kan beklimmen of door grotten kan graven. Of misschien is het dingen met een arm oppakken of een pakket dragen."
Dat wil niet zeggen dat ze hun eigen werk niet voortzetten. Extreme Mobility werkt samen met het Robotic Exploration Lab van Zachary Manchester, assistent-professor luchtvaart en ruimtevaart, om nieuwe controlesystemen te testen op een tweede Stanford Doggo. Het team is ook klaar met de bouw van een robot die twee keer zo groot is als Stanford Doggo en die ongeveer 6 kilogram apparatuur kan dragen. Zijn naam is Stanford Woofer.
 Op afstand bestuurde medicijnafgifte implantaatgrootte van druif kan helpen bij het beheer van chronische ziekten
Op afstand bestuurde medicijnafgifte implantaatgrootte van druif kan helpen bij het beheer van chronische ziekten- Buisjes om celgroei te stoppen
- Wat gebeurt er met ionische en covalente verbindingen wanneer ze oplossen in water?
- Naar een veiligere verwijdering van printplaten
- Bindmiddelvrij titanosilicaat van het type MWW voor selectieve en duurzame epoxidatie van propyleen
Hoofdlijnen
- Hoe geel en blauw groen maken bij papegaaien
- Critici slaan VS over import van olifantentrofeeën
- Het voordeel testen van linkshandig zijn in de sport
- Eenmaal uitgestorven verklaard, Lord Howe Island wandelende takken leven echt
- Kenia mannelijke leeuwen gezien in intieme daad; binding, deskundigen zeggen
- Wat is het eindproduct van fotosynthese?
- Toevallige registratie van een jaarlijkse massale opkomst van raadselachtige bidsprinkhanenvliegen
- Rollende dobbelstenen voor specificatie van celgrootte in epidermis van planten
- Deze dans wordt uitgevoerd:honderden mannelijke kikkersoorten veranderen van kleur rond de paringstijd
- Apple iPhones worden nog steeds verkocht. Daar gaat je hoop op een prijsverlaging.

- De smartphone:een wereldwijd product

- Amazon slimme display-ogen helpen slechtzienden

- Cyberpesten onderdrukken:nieuwe aanpak is snel, nauwkeurig
- Geïnspireerd door Noordelijke schelpdieren, onderzoekers maken een betere zuignap


 Sicilië Etna hoger dan ooit na zes maanden activiteit
Sicilië Etna hoger dan ooit na zes maanden activiteit- Nieuw rapport onderzoekt de wetenschap van interventies om koraalriffen te redden
- Hoe Gram in ponden te converteren
- Wetenschappers bouwen kleinste kabel met draaischakelaar
- Waterstofbrandstofcellen leveren stroom wanneer de brandstoftoevoer is uitgeschakeld
- Watercrisis grijpt Amerikaanse stad in de greep na loodbesmetting
- Onderzoekers maken in water afbreekbaar plastic dat zetmeel en cellulose combineert
- Nieuw onderzoek naar biofilms kan leiden tot een duurzamere waterindustrie
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | German | Dutch | Danish | Norway | Swedish |

-
Wetenschap © https://nl.scienceaq.com
