Wetenschap
Virtuele tests voor autonome rijsystemen
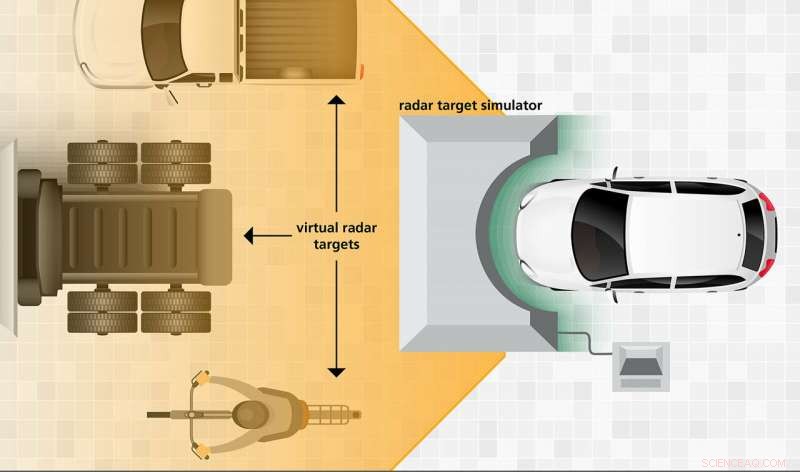
Illustratie van de ATRIUM-radardoelsimulator. Krediet:Fraunhofer FHR
Sensoren in autonome voertuigen moeten uiterst betrouwbaar zijn, omdat automobilisten in de toekomst het verkeer onderweg niet meer constant in de gaten zullen houden. In het verleden werden deze sensoren onderworpen aan zware tests op de weg. Het nieuwe ATRIUM-testapparaat van het Fraunhofer Institute for High Frequency Physics and Radar Techniques FHR maakt het nu mogelijk om een groot deel van deze wegtests naar het laboratorium te verplaatsen. ATRIUM geeft een show voor de radarsensor van het voertuig, het genereren van kunstmatige landschappen die heel dicht bij de werkelijke omstandigheden in het straatverkeer komen.
De auto van morgen rijdt vanzelf. Passagiers rijden over de weg alsof ze worden bestuurd door een privéchauffeur terwijl ze genieten van een gesprek, een krant lezen of misschien een video kijken. Hoewel rijhulpsystemen zoals automatische afstandsregeling niet langer nieuw op de markt zijn, het zal nog enkele jaren duren voordat volledig autonome auto's de straat op gaan. Dit komt omdat de betrokken technologie absoluut betrouwbaar moet zijn. De sensoren zijn hierbij de beslissende factor:bijv. de huidige radarsensoren zijn al in staat om zelfstandig obstakels te detecteren en bij gevaar te remmen. Deze en andere sensoren worden grondig getest voordat ze in de auto worden geïnstalleerd. En autonome voertuigen vereisen een nog hoger niveau van betrouwbaarheid, want als de bestuurder niet meer aan het stuur zit, de autofabrikant kan wel eens de eindverantwoordelijke zijn voor het voorkomen van een ongeval.
Daarom stellen autofabrikanten relatief hoge eisen aan de betrouwbaarheid van sensoren. Ze vragen om sensoren die niet meer dan een enkele fout veroorzaken over rijafstanden van enkele miljoenen kilometers, wat betekent dat de auto's van vandaag vaak zeer lange tests op de weg moeten afleggen. "Dat zijn veel kilometers, " zegt Dr.-Ing. Thomas Dallmann, Leider onderzoeksgroep Aken bij het Fraunhofer Instituut voor hoogfrequente fysica en radartechnieken FHR. "Daarbovenop, meerdere sensoren moeten worden getest om hun betrouwbaarheid statistisch aan te tonen. Dit betekent dat meerdere testvoertuigen met sensoren behoorlijk lang op de weg moeten zijn." Een andere moeilijkheid:als er na enkele duizenden kilometers een fout optreedt, de sensor moet worden geoptimaliseerd en de wegtests moeten helemaal opnieuw beginnen, een uiterst tijdrovend proces.
Tests op de weg naar het lab verplaatsen
Om deze situatie te vereenvoudigen, Er worden pogingen ondernomen om de werkelijkheid te simuleren en de wegproeven in het laboratorium te brengen. Dit type laboratoriumtest bestaat al voor radarsensoren. Radarsensoren zenden een radiosignaal uit dat door verschillende objecten wordt gereflecteerd. Op basis van de echo elektronische sensorsystemen kunnen dan de omgeving analyseren, het meten van de afstand tot gedetecteerde objecten en de snelheid waarmee ze bewegen.

Eenkanaalsversie van de ATRIUM-radardoelsimulator. Krediet:Fraunhofer FHR
Dit principe is in het laboratorium al gesimuleerd met zogenaamde radardoelsimulatoren. Deze simulatoren verzamelen de radargolven die worden uitgezonden door de voertuigradar en wijzigen het radarsignaal om zich te gedragen alsof het objecten heeft ontmoet. De simulator stuurt de informatie vervolgens terug naar de auto in de vorm van een kunstmatig echobeeld. Zo genereert de radardoelsimulator een gesimuleerd landschap voor de voertuigradar. Het voordeel is duidelijk:de testopstelling met een autoradar en een radardoelsimulator kan dag en nacht in het laboratorium draaien, zonder een auto op straat te hoeven zetten.
Helaas, de weinige radardoelsimulatoren die momenteel op de markt zijn, zijn lang niet in staat om een volledig echolandschap te genereren. "De meeste modellen kunnen alleen een zeer beperkt beeld genereren met een enkelcijferig aantal reflecties dat wordt teruggestuurd naar de radar van de auto, ", zegt Dallmann. "Dat is een extreem klein aantal in vergelijking met de situatie in een natuurlijke omgeving." real scenery bevat honderden reflecterende objecten:mensen, auto's, bomen, verkeerssignalen. Zelfs een enkel voertuig in het verkeer kan verschillende reflecties genereren vanuit verschillende hoeken, bijvoorbeeld een personenauto waarvan de bumpers, wielen en zijspiegels reflecteren anders. "We zijn nog ver verwijderd van een realistische setting als het gaat om het testen van sensoren voor autonoom rijden, ’ gaat de ingenieur verder.
Radardoelsimulator genereert maar liefst 300 reflecties
Daarom ontwikkelen Dallmann en zijn team een nieuwe, krachtigere radardoelsimulator genaamd ATRIUM (het Duitse acroniem voor "Automotive testomgeving voor radar in-the-loop testen en metingen"), in staat om aanzienlijk meer reflecterende objecten te genereren. Het huidige doel van de Fraunhofer FHR is om 300 reflecties te genereren tegen de tijd dat het project eindigt, een geweldige doelstelling. "Dit betekent dat ATRIUM de radarsensor van de auto kan presenteren met een relatief natuurgetrouwe scène, zoiets als een drive-in-film voor de radarsensor."
Sinds er een octrooiaanvraag is ingediend voor de ATRIUM-technologie, Thomas Dallmann kan nog geen details prijsgeven. Maar hij kan zeggen:"We hebben de structuur van de transmissiekanalen geoptimaliseerd, waardoor ze veel voordeliger zijn. Als resultaat, de reflecties kunnen zo worden weergegeven dat ze de radar vanuit verschillende richtingen bereiken." Dit zou het mogelijk kunnen maken om nieuwe sensoren voor autonome voertuigen full-scope en onder zeer realistische omstandigheden in het lab te testen. "In de toekomst , we in staat zullen zijn om zeer complexe tests uit te voeren, die het mogelijk zal maken om enorm
verkort de tijd die nodig is voor tests op de weg." Dallmann en zijn collega's zullen de laboratoriumtestfaciliteit met voertuigradar en de ATRIUM-radardoelsimulator presenteren op de Automotive Testing Expo in Stuttgart van 21 tot 23 mei.
 Nieuwe katalysator maakt styreenproductie goedkoper, groener
Nieuwe katalysator maakt styreenproductie goedkoper, groener- Nieuwe inzichten in de structuur van een killer-eiwit
- Studie onthult nieuwe hindernis voor de ontwikkeling van immunotherapieën
- Krachten meten van levende cellen en micro-organismen
- Onderzoekers upgraden organische zonnecellen voor gebruik in dakpannen die stroom opwekken
- Wetenschappers vinden geoxideerd ijzer diep in het binnenste van de aarde (update)
- Onrealistische experimenten betekenen dat de werkelijke impact van stikstofvervuiling op het milieu onbekend is
- Wat heeft het mondiale klimaat te maken met erosiesnelheden?
- Evolutionaire methodologie levert nauwkeurigere weersvoorspellingen op lange termijn op
- Lava van de uitbarsting van La Palma bereikt eindelijk de Atlantische Oceaan
Hoofdlijnen
- Waarom lopen mensen meestal in dezelfde richting?
- Kan slapen met een hersenschudding je doden?
- Waarom verplaatsen chloroplasten zich in Elodea?
- Wat zijn de functies van mRNA & tRNA?
- Wat is een eencellige eukaryoot?
- Vogelweervrienden:studenten uit Arkansas printen 3-D eendenpoot
- Vier belangrijke typen chromosomen
- Dit is waarom Fortnite zo verslavend is
- Hoe groeit schimmel op brood?
- Verspreiding van zelfrijdende auto's kan meer vervuiling veroorzaken - tenzij het elektriciteitsnet radicaal verandert
- Autonome voertuigeenheid GM Cruise krijgt investering van $ 1,15 miljard

- Oplaadstations voor elektrische auto's kunnen portalen zijn voor cyberaanvallen op het elektriciteitsnet

- Franse hotelgigant AccorHotels koopt het Zwitserse Movenpick

- Met behulp van een laser de batterij van morgen naderen


 Astronomen ontdekken potentiële objecten in de buurt van aarde
Astronomen ontdekken potentiële objecten in de buurt van aarde- Planten in Estuary Biomes
- Kunstmatige intelligentie kleurt digitaal weefselmonsters die worden gebruikt in pathologie, arbeidsbesparing, tijd en kosten
- Dendrimeertechnologie krijgt grip op celeiwitten, kan de kankerbehandeling verbeteren
- Nieuw materiaal zou de onderwatercommunicatie met orden van grootte kunnen versnellen
- Zoom belooft privacy aan te pakken, veiligheidsproblemen na klachten
- NASA kijkt naar zware regenval in tropische storm Barbara
- Lijst van de vier soorten bodemstructuren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
