Wetenschap
Team zet een stap hoger in het systeem dat de robot leert hoe hij een taak moet voltooien
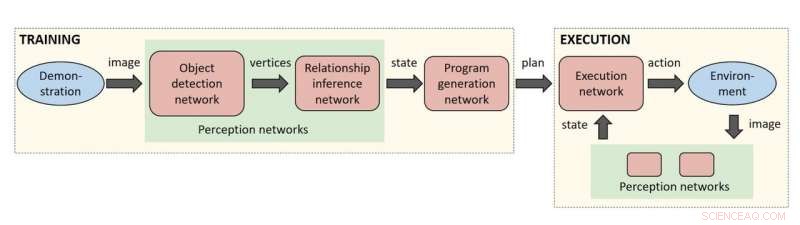
Een beschrijving van hoe de methode werkt:een camera verwerft een live videofeed van een scène, en de posities en relaties van objecten in de scène worden in realtime afgeleid door een paar neurale netwerken. De resulterende waarnemingen worden doorgestuurd naar een ander netwerk dat een plan genereert om uit te leggen hoe deze waarnemingen opnieuw kunnen worden gecreëerd. Eindelijk, een uitvoeringsnetwerk leest het plan en genereert acties voor de robot, rekening houdend met de huidige toestand van de wereld om robuustheid tegen externe verstoringen te garanderen. Krediet:NVIDIA
NVIDIA-onderzoekers zijn begonnen een robot te leren een taak te voltooien door - hier is de kicker - simpelweg de acties van een mens te observeren. Netwerken werden getraind zoals beschreven in een video. Het systeem is in de echte wereld getest op een pick-and-place-probleem van het stapelen van gekleurde kubussen, en ze gebruikten een Baxter-robot.
Een team van zes auteurs besprak dit werk, "Synthetisch getrainde neurale netwerken voor het leren van door mensen leesbare plannen van real-world demonstraties." Hun succes betrof een robot die een taak kon leren van een enkele demonstratie in de echte wereld.
Waarom het belangrijk is:Planners onderzoeken vragen over hoe mensen naast robots zullen werken - hoe veilig en efficiënt kan dit worden gedaan? De auteurs verwoorden het duidelijk. "Om ervoor te zorgen dat robots nuttige taken kunnen uitvoeren in de echte wereld, het moet gemakkelijk zijn om de taak aan de robot te communiceren; dit omvat zowel het gewenste eindresultaat als eventuele hints over de beste manier om dat resultaat te bereiken."
Frederic Lardinois in TechCrunch afgewogen:"Industriële robots zijn meestal gericht op het keer op keer herhalen van een goed gedefinieerde taak. dat betekent het uitvoeren van die taken op veilige afstand van de kwetsbare mensen die ze hebben geprogrammeerd. Meer en meer, echter, onderzoekers denken nu na over hoe robots en mensen dicht bij mensen kunnen werken en zelfs van hen kunnen leren."
Lardinois zei Dieter Fox, de senior directeur van robotica-onderzoek bij NVIDIA, vertelde hem dat het team deze volgende generatie robots wilde inschakelen die veilig in de buurt van mensen kunnen werken. Robots zullen moeten leren hoe ze mensen kunnen helpen, zowel in industriële omgevingen als bij mensen thuis.
Het team toonde een systeem om een voor mensen leesbaar programma af te leiden en uit te voeren uit een real-world demonstratie.
De NVIDIA Developer-site zei dat dit het eerste deep learning-systeem in zijn soort was dat een robot kan leren een taak te voltooien door gewoon naar de acties van een mens te kijken. "Met demonstraties, een gebruiker kan een taak aan de robot doorgeven en aanwijzingen geven over hoe de taak het beste kan worden uitgevoerd."
Hun systeem omvatte een reeks neurale netwerken. Hoe ze werkten:de onderzoekers trainden een reeks neurale netwerken om taken uit te voeren die verband houden met perceptie, het genereren van programma's en het uitvoeren van programma's.
Hun techniek:een camera verwierf een live videofeed van een scène waarin de posities en relaties van objecten in realtime werden afgeleid door een paar neurale netwerken. Deze werden doorgestuurd naar een ander netwerk dat een plan genereerde om uit te leggen hoe die percepties opnieuw konden worden gecreëerd. Een uitvoeringsnetwerk las het plan en genereerde acties voor de robot.
Wat onderscheidt hun verkenning van eerder onderzoek? Een verschil ligt in het trainen van neurale netwerken. De huidige benaderingen vragen om grote hoeveelheden gelabelde trainingsgegevens - een "ernstig knelpunt in deze systemen, ", aldus de NVIDIA-site.
In tegenstelling tot, "Met synthetische datageneratie, er kan met heel weinig inspanning een bijna oneindige hoeveelheid gelabelde trainingsgegevens worden geproduceerd."
Lardinois in TechCrunch noemde hun onderzoek "een belangrijke stap in deze algehele reis om ons in staat te stellen een robot snel nieuwe taken aan te leren."
Gezien het sterke visuele aspect van dit trainingsproces, Hij schreef, Nvidia's achtergrond in grafische hardware helpt zeker. TechSpot merkte op hoe "het uitvoeren van al die neurale netwerken een aantal serieuze rekenmogelijkheden vereist."
De onderzoekers gebruikten NVIDIA TITAN X GPU's.
Jonathan Tremblay, Thans, Artem Molchanov, Stephen Tyree, Jan Kautz, Stan Birchfield is het team achter de krant.
© 2018 Tech Xplore
 Draagbare sensor bewaakt de gezondheid, medicijnen toedient met speeksel en tranen
Draagbare sensor bewaakt de gezondheid, medicijnen toedient met speeksel en tranen- Kwantumfysica en origami voor de ultieme beterschapskaart
- Chemici melden een nieuwe toepassing voor het afvalproduct van de opwekking van kernenergie
- Een snelweg voor elektronen in oxide heterostructuren
- Enzym-aangedreven protocellen stijgen naar de top
- Een weerstation maken Model
- Historisch onderzoek vindt dat het aanpakken van ongelijkheid de sleutel is tot het realiseren van VN-doelen
- Aardbeving in super slo-mo
- Economische kosten van klimaatverandering kunnen zes keer hoger zijn dan eerder werd gedacht
- Expert onderzoekt de afwegingen waarmee bedrijven worden geconfronteerd wanneer ze worstelen met duurzaamheidskwesties
Hoofdlijnen
- Neushoornstroper krijgt 20 jaar cel in Zuid-Afrika
- Studie suggereert nieuwe doelen voor het verbeteren van het sojaoliegehalte
- Wetenschappers ontdekken een eeuwenoud geval van identiteitsverwisseling in de Chesapeake Bay
- De soorten cellen die aan een membraan gebonden zijn Nucleus
- Welke invloed heeft veroudering op de mogelijkheid om homeostase te herstellen?
- Wat is een chromosoom?
- Sarcodina Life Cycle
- Functies van menselijke organen
- Making Better Humans - Het huwelijk van mens en machine
- Onderzoekers bouwen desinfectierobot om schoonmakers te helpen bij COVID-19-uitbraak

- Vrouwelijke astronauten:hoe prestatiekleding is ontworpen om de weg vrij te maken voor prestaties van vrouwen

- Toegankelijkheid mobiele telefoons verbetert, maar er blijven gaten studie vondsten
- Technische connectie stimuleert verticale boeren in New York

- Rapport:populaire VAE-chat-app ToTok een spionagetool van de overheid


 Alaska vulkaan Q&A:uitbarstingen hebben hoogvliegende gevolgen
Alaska vulkaan Q&A:uitbarstingen hebben hoogvliegende gevolgen- Waarom is de studie van de histologie belangrijk in uw algehele begrip van anatomie en fysiologie?
- De vervuiling in Afrika die duizenden baby's doodt, studie zegt:
- Wereldwijde verviervoudiging van koelapparatuur tot 14 miljard in 2050
- Boeing sluit productie laatste commerciële vliegtuig
- Nucleair DNA uit sedimenten helpt de oude menselijke geschiedenis te ontsluiten
- Koperverbinding als veelbelovende kwantumcomputer
- Darmbacteriën vormen de sleutel tot het maken van universeel bloed
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
