Wetenschap
InSight Mars-lander onthult de mol
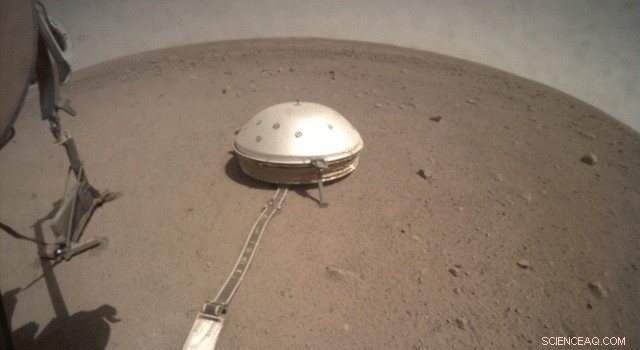
Op 28 juni, 2019, NASA's InSight-lander gebruikte zijn robotarm om de steunstructuur voor zijn graafinstrument te verplaatsen, informeel de 'mol' genoemd. Dit uitzicht werd vastgelegd door de fisheye Instrument Context Camera onder het dek van de lander. Krediet:NASA/JPL-Caltech
Zie de "mol":de warmtegevoelige piek die NASA's InSight-lander op het oppervlak van Mars heeft ingezet, is nu zichtbaar. Vorige week, de robotarm van het ruimtevaartuig heeft met succes de draagstructuur van de mol verwijderd, die niet heeft kunnen graven, en legde het aan de kant. Door de structuur uit de weg te ruimen, krijgt het missieteam zicht op de mol - en misschien een manier om hem te helpen graven.
"We hebben de eerste stap in ons plan om de mol te redden voltooid, " zei Troy Hudson van een wetenschapper en ingenieur met de InSight-missie bij NASA's Jet Propulsion Laboratory in Pasadena, Californië. "We zijn nog niet klaar. Maar voorlopig het hele team is opgetogen omdat we zo veel dichter bij het weer in beweging krijgen van de mol zijn."
Onderdeel van een instrument genaamd het Heat Flow and Physical Properties Package (HP3), de zelfslaande mol is ontworpen om tot wel 5 meter diep te graven en de temperatuur van Mars op te nemen. Maar de mol heeft niet dieper kunnen graven dan ongeveer 30 centimeter, dus op 28 februari In 2019 beval het team het instrument om te stoppen met hameren, zodat ze een pad voorwaarts konden bepalen.
Wetenschappers en ingenieurs hebben tests uitgevoerd om de mol bij JPL te redden, die de InSight-missie leidt, evenals bij het Duitse Lucht- en Ruimtevaartcentrum (DLR), die HP3. Op basis van DLR-testen, de grond biedt mogelijk niet het soort wrijving waarvoor de mol is ontworpen. Zonder wrijving om de terugslag van de zelfhamerbeweging in evenwicht te brengen, de mol zou gewoon op zijn plaats stuiteren in plaats van te graven.
Een teken van dit onverwachte bodemtype is te zien op foto's gemaakt door een camera op de robotarm:er is een kleine put gevormd rond de mol terwijl deze op zijn plaats wordt gehamerd.
"De beelden die van Mars terugkomen, bevestigen wat we hebben gezien tijdens onze tests hier op aarde, "Zei HP3-projectwetenschapper Mattias Grott van DLR. "Onze berekeningen waren correct:deze samenhangende grond verdicht zich in muren terwijl de mol hamert."
Het team wil bij deze put met een kleine schep aan het uiteinde van de robotarm op de grond drukken. De hoop is dat hierdoor de put zou instorten en de mol de nodige wrijving zou geven om te graven.
Het is ook nog steeds mogelijk dat de mol een steen heeft geraakt. Terwijl de mol is ontworpen om kleine stenen uit de weg te duwen of eromheen af te buigen, grotere zullen de voorwaartse voortgang van de spike voorkomen. Daarom selecteerde de missie zorgvuldig een landingsplaats die waarschijnlijk zowel minder rotsen in het algemeen als kleinere aan de oppervlakte zou hebben.
De grijper van de robotarm is niet ontworpen om de mol op te tillen als deze eenmaal uit zijn ondersteunende structuur is, dus het zal de mol niet kunnen verplaatsen als een steen hem blokkeert.
Het team zal op basis van een zorgvuldige analyse bespreken welke volgende stappen moeten worden genomen. Later deze maand, na het loslaten van de armgrijper van de steunstructuur, ze brengen een camera mee voor wat gedetailleerde beelden van de mol.
 Verschil tussen een coëfficiënt en een subscript
Verschil tussen een coëfficiënt en een subscript- Materialen kunnen leiden tot zelfherstellende smartphones
- Grote druppelsortering nu mogelijk bij hoge snelheden
- Onderzoekers ontdekken verborgen SARS-CoV-2-poort die opengaat om COVID-infectie mogelijk te maken
- Li-ionen transport over elektrolyten en SEI
- Kunstmatige intelligentie om de wetenschap van het aardsysteem te stimuleren
- Nieuwe kaart voor radioactieve bodemverontreiniging in West-Europa
- NASA analyseert zware regenval boven Zuid-Thailand
- Wijdverbreide bosbranden als een proxy voor de belasting van hulpbronnen
- Definitie van een landecosysteem
Een ecosysteem op het land of op het land is alle levende organismen en hun fysieke omgeving op een bepaald stuk land. Terrestrische ecosystemen kunnen interageren en overlappen met mariene (zoutwater) en limnologis
Hoofdlijnen
- Wat is een prehistorische toolkit en hoe zou het de menselijke geschiedenis kunnen herschrijven?
- Hoeveel spieren heb je nodig om te glimlachen?
- Habitat telt wanneer roofdieren op de loer liggen
- Extra Y-chromosoom bij mannen
- Huismuizen kunnen hun vocalisaties moduleren, afhankelijk van het geslacht van de ontvanger
- Waarom haten sommige mensen het geluid van kauwen? Wetenschappers hebben misschien het antwoord
- Hoe nemen we beslissingen?
- Een geheim wapen voor muggen:een lichte aanraking en sterke vleugels
- Zeldzame witte tijger met kanker sterft in dierentuin
- Zal het sturen van selfies naar de Jupiter-maan de aandacht trekken van een ET?
- Voorbereiding om te vliegen met Sentinel-5P

- Gesimuleerde sterrenstelsels leveren nieuw bewijs van donkere materie
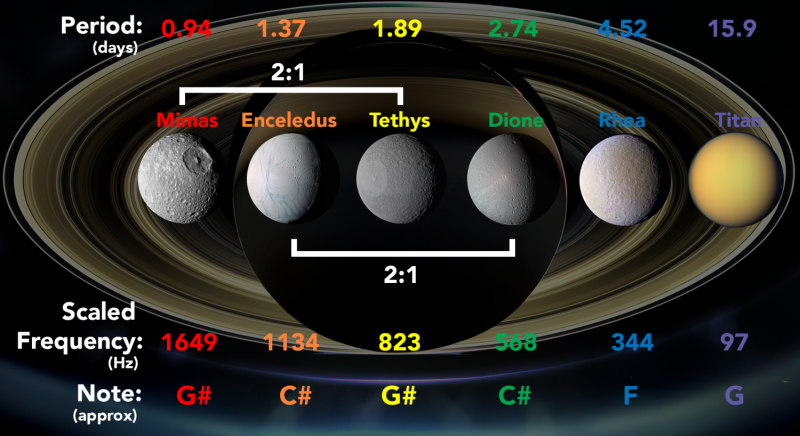
- Astrofysici zetten manen en ringen van Saturnus om in muziek
- Japan breekt missie met miniraket kort na lancering af


 Wat zijn de functies van een magneetschakelaar?
Wat zijn de functies van een magneetschakelaar? - Kan ik die chemicaliën mengen? Daar is een app voor!
- Dieren die in het ecosysteem leven
- Nepal probeert record met een Dode Zee van plastic zakken
- Nieuwe studie onthult verband tussen klimaat, leven en de beweging van continenten
- Vergeet wearables:toekomstige wasbare slimme kleding die wordt aangedreven door Wi-Fi zal uw gezondheid in de gaten houden
- Lab ontwikkelt een manier om defecten in moeilijk af te beelden materialen op te sporen
- De factoren die de periode van oscillatie kunnen beïnvloeden
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
