Wetenschap
Een simulatieraamwerk gebruiken om het gedrag van de wervelkolom van viervoetige robots te bestuderen
Krediet:Bhattacharya et al.
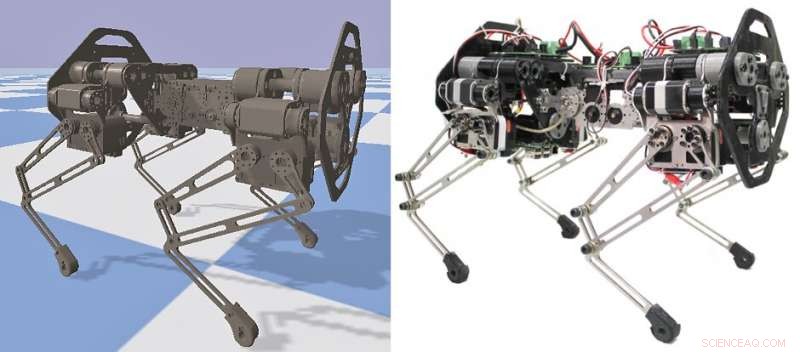
Onderzoekers van het Robert Bosch-centrum voor cyberfysieke systemen in Bangalore, Indië, hebben onlangs een simulatieraamwerk voorgesteld om de effecten van spinale gewrichtsactivering op de voortbewegingsprestaties van viervoetige robots systematisch te bestuderen. In hun studie hebben geschetst in een paper dat vooraf is gepubliceerd op arXiv, ze gebruikten dit raamwerk om het gedrag van de wervelkolom te onderzoeken van een viervoetige robot genaamd Stoch 2 en hun effecten op de begrenzingsprestaties.
"Dit onderzoek kwam tot stand tijdens het verkennen van de basis van snelle voortbeweging in viervoeters en robots, Shounak Bhattacharya, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "Het is al enige tijd bekend dat kleine en middelgrote viervoeters de flexibiliteit van hun ruggengraat gebruiken om hun voortbewegingssnelheid en energie-efficiëntie te verbeteren. Dit gebruik van flexibiliteit inspireerde robotici om het concept in meer detail te onderzoeken om een oplossing te vinden aan dit probleem met behulp van de beschikbare wiskundige hulpmiddelen."
In tegenstelling tot eerdere onderzoekers, Bhattacharya en zijn collega's gingen op zoek naar het gedrag van de wervelkolom van viervoetige robots met behulp van machine learning-technieken. Het belangrijkste doel van hun onderzoek was het gebruik van Deep Reinforcement Learning (D-RL) om de complexe coördinatie tussen ruggengraat en benen in robots te realiseren.
"In een D-RL-kader, leren vanaf nul kan leiden tot een beter en robuuster beleid dan het opnemen van menselijke begeleiding, " zei Bhattacharya. "Echter, leren vanaf het begin brengt meerdere aanvankelijke mislukkingen met zich mee voordat een werkend beleid wordt gegenereerd. In dit werk, er waren meer dan 2 miljoen stappen nodig voordat een actief en bruikbaar beleid werd verkregen."
Het uitvoeren van veel proeven direct op de hardware van een robot vereist een enorme hoeveelheid tijd en middelen. De onderzoekers besloten daarom de robot en zijn omgeving te simuleren in PyBullet, een python-module die de Bullet-fysica-engine verbetert met robotica en machine learning-mogelijkheden. In hun studie hebben ze gebruikten PyBullet om de effecten van spinale gewrichtsactivering op de begrenzingsprestaties van Stoch 2 te evalueren, een 16-DOF quadruped spined robot.
"We hebben het robotmodel in deze omgeving getraind en vastgesteld dat het leeralgoritme één volledige training in 4 uur uitvoerde, wanneer het wordt uitgevoerd voor maximaal 10 miljoen stappen, op een pc aangedreven door een Intel Core i7 op 3,5 Ghz met 12 cores, en 32 GB RAM, "Bhattacharya zei. "Het gebruik van een simulatieraamwerk verminderde de tijd per training en maakte het niet meer nodig om op de hardware te experimenteren."
PyBullet gebruiken als leerraamwerk voor hun robot, de onderzoekers bereikten veelbelovende resultaten. De bevindingen die ze tijdens simulaties verzamelden, suggereren dat het actieve gebruik van de wervelkolom dat wel doet, in feite, de staplengte en transportkosten van een robot verbeteren, terwijl ook de natuurlijke frequentie wordt verlaagd tot meer realistische waarden. uiteindelijk, Stoch 2 behaalde een begrenzingssnelheid van 2,1 m/s, met een maximum Froude-getal van 2.
Deze studie, onder toezicht van vier faculteitsleden van het Indian Institute of Science:Shishir Kolathaya, Ashitava Ghosal, Bharadwaj Amrutur en Shalabh Bhatnagar, maakt deel uit van een breder project genaamd Walking Robot. In de toekomst, het zou andere onderzoekers kunnen inspireren om hetzelfde simulatiekader te gebruiken om het ruggengraatgedrag van hun robots en de daaruit voortvloeiende voortbewegingsprestaties te verbeteren.
"We hebben de coördinatie van de wervelkolom en het been verkregen via een op D-RL gebaseerd raamwerk, die de energie-efficiëntie en snelheid van de viervoeter verhoogde, " zei Bhattacharya. "Opgemerkt moet worden dat al deze gedragingen van de grond af werden verkregen zonder enig begrip van de mechanica van de wervelkolom. In ons toekomstige werk, we zijn van plan het neurale netwerk op de hardware in te zetten en het geleerde beleid direct uit te voeren."
© 2019 Wetenschap X Netwerk
 De echte mislukking van de klimaatconferenties in Madrid was het niet krijgen van een brede deal over de wereldwijde koolstofmarkten
De echte mislukking van de klimaatconferenties in Madrid was het niet krijgen van een brede deal over de wereldwijde koolstofmarkten- Teledetectie toegepast om de helderheid van het meer in China te schatten
- Bosbrandrook is slecht voor je ogen, ook - hier kun je ze beschermen
- Nieuwe tool kan helpen bij regionale zeespiegelplanning in de VS
- Wereld van verandering:Columbia Glacier, Alaska
Hoofdlijnen
- De functies van de linker temporale kwab
- Waarom liegen we?
- DNA versus RNA: wat zijn de overeenkomsten en verschillen? (met diagram)
- Nieuwe aanpak kan de sleutel zijn tot de behandeling van antibioticaresistente bacteriën
- Wat is zelfrespect?
- De Krebs-cyclus gemakkelijk gemaakt
- Zelfverdediging voor planten
- Het simuleren van seks met walvisachtigen met kadaverdelen biedt inzicht in mariene copulatie
- Geowetenschappers vergelijken micro-organismen in de poolgebieden
- E-skin die veranderingen in wind kan detecteren, waterdruppels en bewegende mieren

- Walmart koopt 77% van Indias Flipkart voor $ 16 miljard

- Amazon-werknemers protesteren tegen virusveiligheid

- Onderzoekers keren de stroom van tijd om op de quantumcomputer van IBM
- Google neemt het op tegen Apple Arcade met mobiele gameservice


 Twitter bevestigt nieuwe accounts in spamgevecht
Twitter bevestigt nieuwe accounts in spamgevecht- Studie beschrijft hoe de driedimensionale architectuur van het genoom verandert tijdens de celcyclus
- Pakistan wil de glorie van de oude Mughal-stad Lahore . doen herleven
- Grafeentunneling-knooppunten:voorbij het breekpunt
- Kunstmatige intelligentie bespaart water voor verenigingen van watergebruikers
- Google koopt Chelsea Market-gebouw in New York voor 2,4 miljard dollar
- Gerecycled beton en CO₂ uit de lucht verwerkt tot nieuw bouwmateriaal
- Eerste röntgenfoto's van Uranus ontdekt
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
