Wetenschap
Een robot gemaakt van ijs kan zich aanpassen en repareren op andere werelden
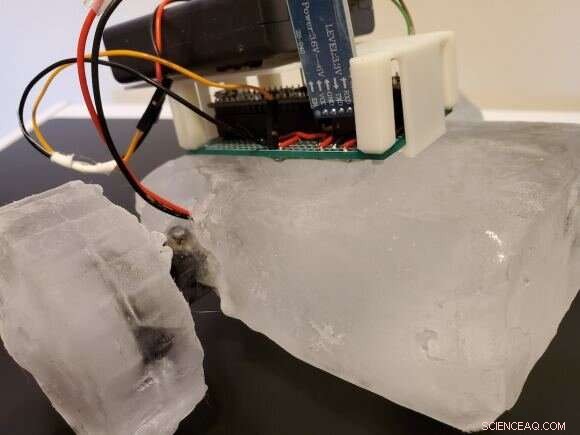
De IceBot is nu nog maar een concept, met enkele structurele delen van ijs. Krediet:GRASP-lab
Enkele van de meest prikkelende doelen bij verkenning van de ruimte zijn bevroren ijswerelden. Neem Jupiters maan Europa, bijvoorbeeld. Het is warm, zoute ondergrondse oceaan is begraven onder een maanbrede ijslaag. Wat is de beste manier om het te verkennen?
Misschien kan een ijsrobot een rol spelen.
Hoewel 's werelds ruimteagentschappen - vooral NASA - steeds beter worden in het bouwen van robots om plaatsen zoals Mars te verkennen, die robots hebben beperkingen. Misschien wel de belangrijkste van die beperkingen is de mogelijkheid van een storing. Zodra een rover op Mars - of ergens nog verder weg - uitvalt, het is spel voorbij. Er is geen haalbare manier om iets als MSL Curiosity te repareren als het kapot gaat tijdens het verkennen van het oppervlak van Mars.
Maar wat als de wereld die wordt verkend een bevroren wereld is, en de robot was gemaakt van ijs? Kunnen ijzige robots zelfreparatie uitvoeren, zelfs in beperkte mate? Kunnen ze daar daadwerkelijk worden vervaardigd en geassembleerd, zelfs gedeeltelijk?
Een recent artikel getiteld "Robots Made From Ice:An Analysis of Manufacturing Techniques" onderzocht die mogelijkheid. De paper werd gepresenteerd op de IEEE (Institute for Electrical and Electronics Engineers) International Conference on Robotics and Systems 2020 in 2020. Devin Carroll en Mark Yim hebben het geschreven. Carroll is een Ph.D. student robotica aan de Universiteit van Pennsylvania, en Yim is directeur van het Grasp Lab en hoogleraar werktuigbouwkunde aan dezelfde instelling.
De hele robot zou niet van ijs zijn, blijkbaar. Maar een deel van de structuur zou kunnen zijn. Het idee is gecentreerd rond een modulair ontwerp dat zichzelf kan repareren of zelfs zelf kan repliceren en dat na implementatie in-situ kan worden voltooid, zodra terreinobstakels en de details van de taken van de missie beter werden begrepen.
In hun samenvatting de twee auteurs schrijven, "Het ijs zorgt voor meer flexibiliteit in het systeemontwerp, waardoor de robotstructuur na de inzet kan worden ontworpen en gebouwd nadat taken en terreinobstakels beter zijn geïdentificeerd en geanalyseerd."
Blijkbaar, er zijn veel problemen en obstakels met deze potentiële technologie. Maar zo beginnen ze allemaal.
Het tweetal auteurs maakt duidelijk dat dit voorwerk is. "De auteurs onderzoeken een structuurgedreven benadering om compatibele productieprocessen te onderzoeken met de nadruk op het besparen van procesenergieën, " schrijven ze. "Een mobiel robotplatform gemaakt van ijs wordt gepresenteerd als een proof of concept en eerste demonstratie."
Het idee is gericht op een tweewielige rover genaamd Icebot. Icebot is gebaseerd op het ontwerp voor Antarctische rovers en heeft structurele elementen gemaakt van ijs.
In hun werk, het paar auteurs voerde experimenten uit om het hele idee te onderzoeken. Het werk was gebaseerd op twee veronderstellingen:
- De robot zal werken bij temperaturen onder het vriespunt, en al hun berekeningen zijn gebaseerd op de gemiddelde jaarlijkse temperaturen op het McMurdo-station op Antarctica.
- Blokken ijs zijn direct beschikbaar.
Hun paper presenteert ook drie algemene ontwerpprincipes.
- Componenten moeten worden ontworpen om warmte te beheren.
- Alle elektronica, aandrijvingen en stroombronnen moeten worden geïsoleerd van smelten.
- De ideale methode om de ijscomponenten van de robot vorm te geven, hangt af van het uiteindelijke volume van het onderdeel ten opzichte van het volume dat van een onbewerkte ijsblok moet worden verwijderd.
Er is nog een overkoepelende voorwaarde in dit alles, te. Voor robots die op andere werelden opereren, energie is een kostbaar goed. Elke missie heeft een energiebudget dat nauwgezet wordt beheerd. Neem het ruimtevaartuig Voyager, bijvoorbeeld. Hun indrukwekkende levensduur is ten minste gedeeltelijk te danken aan het uiterst nauwgezette gebruik van energie. Dus de hoeveelheid energie die een ijsrobot gebruikt om zichzelf te produceren en te bouwen, is van cruciaal belang.
Met die voorwaarden in het achterhoofd, kwamen de onderzoekers met enkele interessante ideeën.
Allereerst, het hele scenario zou waarschijnlijk niet een enkele robot betreffen, maar een paar, in tandem opereren. Eén eenheid zou het primaire verkenningsvoertuig zijn, en de andere zou een soort moederschip zijn en de productie- en reparatiemogelijkheden hebben.
In een interview met de IEEE-spectrum , Devin Carroll legde uit hoe dit eruit zou kunnen zien. "Als ik denk aan een arctische (of planetaire) verkenningsrobot met zelfaanpassings- of reparatiemogelijkheden, stel ik me een systeem voor met twee soorten robots:de eerste verkent de omgeving en verzamelt materialen die nodig zijn om zelfverbetering of reparatie uit te voeren, en de tweede is een soort manipulator/productiesysteem. We kunnen ons voorstellen dat de verkenningsklasse van de robot terugkeert naar een gecentraliseerde locatie met een verzoek om een ploeg of een andere vergroting en het productiesysteem zal de vergroting rechtstreeks aan de robot kunnen bevestigen."
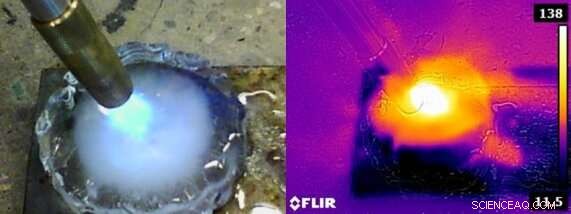
De onderzoekers testten een open vlam als een methode om gaten in het ijs te smelten waarin de actuator van de robot kan worden geplaatst. Links:Een butaantoorts wordt gebruikt om een gat in het ijsblokje te smelten. Rechts:Een hittekaart (in graden C) van de butaantoorts en ijsblanco. Krediet:Carroll en Yim, 2020
Het paar wetenschappers voerde enkele tests uit om hun ideeën uit te werken. Ze keken naar verschillende manieren om ijs te manipuleren. Voor productie, ze keken naar vormen, waar ijs eerst zou worden gesmolten en vervolgens in een vorm zou worden gegoten. Ze keken ook naar 3D-printen, en machinale bewerking. Elke methode heeft zijn voor- en nadelen, en elk heeft verschillende energiebehoeften.
Ze hebben ook gekeken naar de integratie van actuatoren. Zoals uitgelegd, actuatoren zelf kunnen niet van ijs zijn. Actuatoren worden blootgesteld aan verschillende belastingen, ijs kan het niet aan. De integratie van de actuatoren met componenten van ijs is dus een cruciale operatie.
Ze experimenteerden met vier verschillende manieren om actuatoren te integreren:
- Mechanisch snijwerk met zoiets als een beitel.
- Smelten van een gat voor de actuator met open vlam.
- Een gat maken voor de actuator met een verwarmde metalen staaf.
- Snijden, bijvoorbeeld, met een gatenzaag.
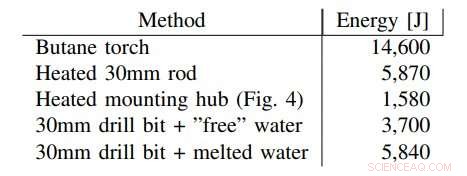
Elk van de methoden heeft zijn sterke en zwakke punten. Elk heeft ook zijn eigen energiebehoefte. De onderstaande tabel geeft de energie weer die nodig is voor elke methode om een montagezak voor de actuator te creëren, en om het op zijn plaats te bevriezen.
Aangezien dit voorwerk is, het team kwam niet tot definitieve conclusies. Maar hun experimenten brachten enkele valkuilen aan het licht die moeten worden overwonnen als in-situ ijsproductie en -reparatie ooit effectief zal worden geïmplementeerd.
Ze ontdekten dat het oppervlak van de bevestiging cruciaal is voor succes, wat geen verrassing is. In een notendop, een groter oppervlak in het gewricht is beter, en helpt het ijs weerstand te bieden aan spanningen als gevolg van koppel en andere krachten. IJsdikte was ook een probleem, wat ook niet verwonderlijk is.
De auteurs vatten hun werk samen in de conclusie van het artikel. "Dit werk is een stap in de richting van een lichtgewicht, aanpasbaar robotsysteem dat kan werken in omgevingen onder het vriespunt. Dit systeem leent zich voor zelfherconfiguratie, zelfreplicatie en zelfreparatie, " zij schrijven.
"Om de ontwikkeling van geautomatiseerde methoden voor het maken en samenstellen van dit systeem te stimuleren, zijn we van plan een gezamenlijke module na te streven die gemakkelijk kan worden geïntegreerd met passieve ijsblokken, ', schrijven ze. Dat zou het IceBot-systeem eenvoudiger en modulairder maken.
Ze legden ook uit wat de toekomst inhoudt voor hun IceBot-concept:"Aanvullend toekomstig werk omvat:het bepalen van een algemene klasse van oppervlakken waarop dit systeem kan bewegen, methoden om ijselementen te gebruiken voor interactie met de omgeving, en verder onderzoek naar de sterktegrenzen van de verbindingen tussen actuatoren en het ijs."
In de Spectrum IEEE interview, Carroll sprak ook over de toekomst van hun IceBot-inspanningen en benadrukte de noodzaak van modulariteit. "Mijn directe focus ligt op het ontwerpen van een modulaire verbinding die we kunnen gebruiken om actuatoren gemakkelijk en veilig met ijsblokken te verbinden, en om een eindeffector te ontwikkelen waarmee we ijsblokken kunnen manipuleren zonder ze permanent te vervormen via schroefgaten of andere , vergelijkbare verbindingsmethoden."
Er moet nog veel werk worden verzet voordat ijsrobottechnologie kan worden geïmplementeerd. Maar het is een prikkelende ontwikkeling, en Europa en Enceladus wachten. Agentschappen zoals NASA nemen de in-situ middelen voor hun missies naar de maan en naar Mars onder de loep.
IJs komt veel voor in het zonnestelsel. De ruimte is ijskoud, en veel lichamen zijn bedekt met ijs. Zou een in-situ IceBot in de toekomst kunnen zijn?
 De aardbeving van Le Teil biedt nieuwe inzichten over seismisch risico in Frankrijk en West-Europa
De aardbeving van Le Teil biedt nieuwe inzichten over seismisch risico in Frankrijk en West-Europa- Welk type organismen gebruikt cellulaire ademhaling?
- Archeologie gebruiken om het verleden te begrijpen, Cadeau, toekomst van klimaatverandering
- De meest invloedrijke klimaatwetenschappelijke paper aller tijden
- De droogtes in Zuid-Australië worden erger
Hoofdlijnen
- Pittige Tomaten,
- Hoe kan ik honing uit een wilde bijenkorf extraheren?
- Hoe spoor je een geheimzinnige havik op? Volg de isotopen
- De eigenschappen van steenzout
- Het voordeel testen van linkshandig zijn in de sport
- Hoe dicht zijn we bij het creëren van een universele bloedgroep?
- Hoe onderhoudt een cel homeostase?
- Wat wordt geoxideerd en wat wordt er gereduceerd in celademhaling?
- Eetbaar diercelproject met Candy
- Nieuw bewijs voor een warmer en natter vroeg Mars
- Hubble ziet een krachtig sterrenstelsel met een wachtwoordnaam

- Twee sterren versmolten tot massieve witte dwerg
- DESI-team bereidt zich voor op herstart telescoopinstrumenten na onverwachte uitschakeling

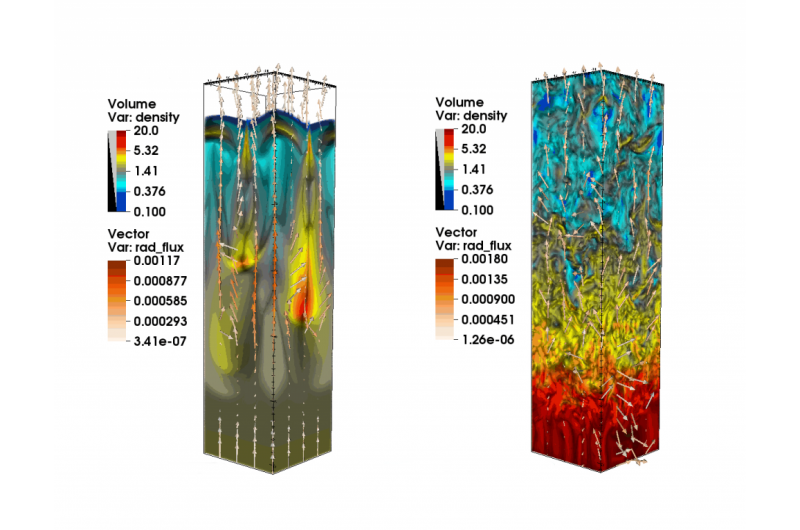
- Stellaire simulatoren:astrofysici zullen supercomputers gebruiken om de drijvende krachten achter massaverlies in massieve sterren te onderzoeken

 Het volgen van therapeutische nanodeeltjes die zich richten op borsttumoren
Het volgen van therapeutische nanodeeltjes die zich richten op borsttumoren- Koolstofput Bhutan telt kosten van plannen voor groene toekomst
- Schade veroorzaakt door een Tornado
- COVID-19 voorspellen met behulp van fuzzy logic
- Laser maakt foto's van elektronen in kristallen
- 5, 300-jarige Icemans laatste maaltijd onthult opmerkelijk vetrijk dieet
- Hoe plastic containers te steriliseren
- Wat zit er in de buitenste band van een orkaan?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Portuguese | Swedish | German | Dutch | Danish | Norway | Spanish |

-
Wetenschap © https://nl.scienceaq.com
