Wetenschap
Hoe ASIMO werkt
 Honda's ASIMO-robot. Bekijk meer foto's van robots . Foto met dank aan Honda Motor Co., Ltd.
Honda's ASIMO-robot. Bekijk meer foto's van robots . Foto met dank aan Honda Motor Co., Ltd. Wil je een robot om je avondeten te koken, doe je huiswerk, maak je huis schoon, of je boodschappen halen? Robots doen al veel van het werk dat wij mensen niet willen doen, kan niet, of gewoon niet zo goed kunnen doen als onze robotachtige tegenhangers. In fabrieken over de hele wereld, onstoffelijke robotarmen assembleren auto's, plaats snoepjes voorzichtig in hun dozen, en doe allerlei vervelende klusjes. Er zijn zelfs een handvol robots op de markt wiens enige taak het is om de vloer te stofzuigen of uw gazon te maaien.
Afbeeldingengalerij voor robots
Velen van ons zijn opgegroeid met het kijken naar robots op tv en in de films:daar was Rosie, de robothuishoudster van de Jetsons; Gegevens, het Android-bemanningslid op "Star Trek:The Next Generation"; en uiteraard, C3PO van "Star Wars." De robots die vandaag worden gemaakt, bevinden zich niet helemaal in het rijk van Data of C3PO, maar er zijn verbazingwekkende vorderingen gemaakt in hun technologie. Honda-ingenieurs zijn druk bezig geweest met het maken van de ASIMO robot voor meer dan 20 jaar . In dit artikel, we zullen ontdekken wat ASIMO de meest geavanceerde humanoïde robot tot nu toe maakt.
De Honda Motor Company ontwikkelde ASIMO, wat staat voor Geavanceerde stap in innovatieve mobiliteit , en is de meest geavanceerde humanoïde robot ter wereld. Volgens de ASIMO-website, ASIMO is de eerste humanoïde robot ter wereld die dat kan zelfstandig lopen en trappen beklimmen .
Naast ASIMO's vermogen om te lopen zoals wij, het kan ook voorgeprogrammeerde gebaren en gesproken commando's begrijpen , herken stemmen en gezichten en interface met IC-communicatiekaarten . ASIMO heeft armen en handen, zodat het dingen kan doen zoals lichtschakelaars aanzetten, open deuren, voorwerpen dragen, en karren duwen.
In plaats van een robot te bouwen die een ander stuk speelgoed zou zijn, Honda wilde een robot maken die een helper voor mensen -- een robot om in huis te helpen, ouderen helpen, of iemand helpen die in een rolstoel of bed zit. ASIMO is 1,3 meter hoog, dat is precies de juiste hoogte om oog in oog te kijken met iemand die op een stoel zit. Hierdoor kan ASIMO het werk doen waarvoor het is gemaakt zonder te groot en bedreigend te zijn. Vaak aangeduid als een "kind dat een ruimtepak draagt, " ASIMO's vriendelijke uiterlijk en niet-bedreigende afmetingen werken goed voor de doeleinden die Honda in gedachten had bij het maken ervan.
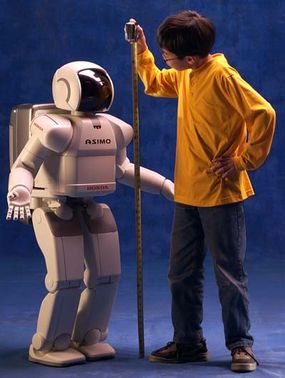 ASIMO is slechts 1,20 meter lang Foto met dank aan Honda Motor Co., Ltd.
ASIMO is slechts 1,20 meter lang Foto met dank aan Honda Motor Co., Ltd. ASIMO kan ook taken uitvoeren die dat ook zijn gevaarlijk voor mensen om te doen, zoals het betreden van gevaarlijke gebieden, ontwapenende bommen, of het blussen van branden.
Kan niet te voorzichtig zijnEr is gemeld dat, omdat ASIMO's wandeling zo griezelig mensachtig is, Honda-ingenieurs voelden zich genoodzaakt om het Vaticaan te bezoeken om er zeker van te zijn dat het oké was om een machine te bouwen die zoveel op een mens leek. (Het Vaticaan vond het oké.)
Inhoud
- ASIMO's beweging:loop als een mens
- ASIMO's beweging:vloeiende bewegingen
- De zintuigen van ASIMO
- ASIMO besturen en aandrijven
- ASIMO's levensverhaal
- ASIMO's peers
ASIMO's beweging:loop als een mens
 De fysiologie van ASIMO is ontwikkeld om de menselijke fysiologie na te bootsen. Foto met dank aan Honda Motor Co., Ltd.
De fysiologie van ASIMO is ontwikkeld om de menselijke fysiologie na te bootsen. Foto met dank aan Honda Motor Co., Ltd. Honda-onderzoekers begonnen met het bestuderen van de poten van insecten, zoogdieren, en de beweging van een bergbeklimmer met prothetische benen om de fysiologie en alle dingen die plaatsvinden als we lopen beter te begrijpen - vooral in de gewrichten. Bijvoorbeeld, het feit dat wij ons gewicht verplaatsen het gebruik van ons lichaam en vooral onze armen om in evenwicht te blijven was erg belangrijk om ASIMO's loopmechanisme goed te krijgen. Het feit dat we hebben tenen die hulp bij ons evenwicht werd ook in overweging genomen:ASIMO heeft eigenlijk zachte uitsteeksels op zijn voeten die een vergelijkbare rol spelen als die onze tenen spelen als we lopen. Dit zachte materiaal ook absorbeert impact op de gewrichten, net zoals onze zachte weefsels doen als we lopen.
ASIMO heeft heup, knie, en voetgewrichten . Robots hebben gewrichten die onderzoekers noemen " graden van vrijheid ." Een enkele vrijheidsgraad maakt beweging naar rechts en links of op en neer mogelijk. ASIMO heeft 34 vrijheidsgraden verspreid over verschillende punten van zijn lichaam om hem vrij te laten bewegen. Er zijn drie vrijheidsgraden in ASIMO's nek, zeven op elke arm en zes op elk been. Het aantal vrijheidsgraden dat nodig is voor de benen van ASIMO werd bepaald door de beweging van het menselijk gewricht te meten tijdens het lopen op een vlakke ondergrond, traplopen en rennen.
ASIMO heeft ook een snelheidssensor en een gyroscoop sensor op zijn lichaam gemonteerd. Zij voeren de taken uit van:
- het detecteren van de positie van het lichaam van ASIMO en de snelheid waarmee het beweegt
- aanpassingen voor balans doorgeven aan de centrale computer
Deze sensoren werken op dezelfde manier als onze innerlijke oren in de manier waarop ze evenwicht en oriëntatie behouden.
ASIMO heeft ook: vloeroppervlak sensoren in zijn voeten en zes ultrasone sensoren in zijn middenstuk. Deze sensoren verbeteren ASIMO's vermogen om te communiceren met zijn omgeving door objecten rond ASIMO te detecteren en verzamelde informatie te vergelijken met kaarten van het gebied dat is opgeslagen in het geheugen van ASIMO.
Om het werk te doen dat onze spieren en huid doen bij het voelen van spierkracht, druk- en gewrichtshoeken, ASIMO heeft beide gewrichtshoeksensoren en een zes-assige krachtsensor .
 Foto met dank aan Honda Motor Co., Ltd.
Foto met dank aan Honda Motor Co., Ltd. Tenzij je veel weet over robotica, je begrijpt misschien niet helemaal de ongelooflijke mijlpaal dat ASIMO loopt zoals wij. Het belangrijkste onderdeel van ASIMO's wandeling is de draaimogelijkheden . In plaats van te moeten stoppen en schuifelen, stop en schuifel, en stop en schuifel een nieuwe richting in, ASIMO leunt en draait soepel, net als een mens. ASIMO kan zijn stappen ook zelf aanpassen voor het geval hij struikelt, wordt geduwd, of anderszins iets tegenkomt dat het normale lopen verandert.
Om dit te realiseren, De ingenieurs van ASIMO moesten een manier vinden om te werken met de traagheidskrachten ontstaan tijdens het lopen. Bijvoorbeeld, de zwaartekracht van de aarde creëert een kracht, net als de snelheid waarmee je loopt. Die twee krachten worden de 'totale traagheidskracht' genoemd. Er is ook de kracht die ontstaat wanneer je voet contact maakt met de grond, de "grondreactiekracht" genoemd. Deze krachten moeten in evenwicht worden gebracht, en houding moet werken om het te laten gebeuren. Dit heet de " nul moment punt " (ZMP).
Om de houding van ASIMO te controleren, ingenieurs werkten aan drie controlegebieden:
- Controle van de reactie op de vloer betekent dat de voetzolen oneffenheden in de vloer absorberen en toch stevig blijven staan.
- Doel ZMP-besturing betekent dat wanneer ASIMO niet stevig kan staan en zijn lichaam naar voren begint te vallen, hij behoudt zijn positie door zijn bovenlichaam te bewegen in de richting tegengesteld aan de naderende val. Tegelijkertijd, het versnelt het lopen om snel tegenwicht te bieden aan de val.
- Locatiecontrole voor voetplanting treedt in werking wanneer de doel-ZMP-besturing is geactiveerd. Het past de lengte van de stap aan om de juiste verhouding tussen de positie en snelheid van het lichaam en de lengte van de stap terug te krijgen.
Hoewel ASIMO nog niet helemaal klaar is voor prime time (er moeten nog verbeteringen worden aangebracht om het volledig te laten functioneren zoals Honda hoopt), Honda heeft ASIMO aan het werk gezet als receptioniste in haar kantoor in Wako in de prefectuur Saitama, net ten noorden van Tokio. ASIMO besteedt zijn tijd aan het begroeten van gasten en het rondleiden van hen door de faciliteiten.
Om deze taken uit te voeren, ASIMO moet speciaal worden geprogrammeerd om de indeling van de gebouwen te kennen en de juiste manier om bezoekers te begroeten en vragen te beantwoorden.
Als de gedachte aan een leger ASIMO-robots je de idioot geeft, je kan ontspannen. Honda zegt dat ASIMO nooit zal worden gebruikt in militaire toepassingen.
Lees verder
ASIMO's beweging:vloeiende bewegingen

ASIMO kan vallende bewegingen detecteren en er snel op reageren; maar de ingenieurs van ASIMO wilden meer. Ze wilden dat de robot een vlotte gang evenals iets doen dat andere robots niet kunnen doen -- draaien zonder te stoppen .

Als we om de hoek lopen, we verschuiven ons zwaartepunt in de bocht. ASIMO gebruikt een technologie genaamd " voorspellende bewegingscontrole , " ook wel Honda's Intelligent Real-Time Flexible Walking Technology of I-Walk genoemd, om hetzelfde te bereiken. ASIMO voorspelt hoeveel het zijn zwaartepunt naar de binnenkant van de bocht moet verplaatsen en hoe lang die verschuiving moet worden gehandhaafd. Omdat deze technologie werkt in echte tijd , ASIMO kan dit doen zonder te stoppen tussen de stappen, wat andere robots moeten doen.
Eigenlijk, bij elke stap die ASIMO zet, het moet zijn traagheid bepalen en vervolgens voorspellen hoe zijn gewicht moet worden verplaatst voor de volgende stap om soepel te kunnen lopen en draaien. Het past een van de volgende factoren aan om de juiste positie te behouden:
- de lengte van zijn stappen
- zijn lichaamshouding
- zijn snelheid
- de richting waarin het stapt
Hoewel het reproduceren van een mensachtige wandeling een geweldige prestatie is, ASIMO kan nu rennen met snelheden tot 3,7 mijl per uur (6 kilometer per uur). Om te kwalificeren als een echte lopende robot, ASIMO moet bij elke stap beide voeten even van de grond houden. ASIMO slaagt erin om bij elke stap 0,08 seconden in de lucht te blijven tijdens het hardlopen.
Honda-ingenieurs kwamen een geheel nieuwe reeks uitdagingen tegen terwijl ze probeerden ASIMO de mogelijkheid te geven om te rennen. Ze gaven de romp van ASIMO een zekere mate van vrijheid om te helpen bij het buigen en draaien, zodat de robot zijn houding kon aanpassen terwijl hij in de lucht was. Zonder dit vermogen, ASIMO zou de controle verliezen in de lucht, mogelijk ronddraaien in de lucht of struikelen bij de landing.
Om bochten soepel te maken tijdens het hardlopen, de ingenieurs verbeterden ASIMO's vermogen om het zwaartepunt in bochten te kantelen om het evenwicht te behouden en de middelpuntvliedende kracht tegen te gaan. ASIMO kan zelfs anticiperen op bochten en erop beginnen te leunen voordat de bocht wordt gestart, net zoals je zou doen als je aan het skiën of skaten was.
In de volgende sectie, we zullen kijken hoe ASIMO afbeeldingen kan herkennen en zijn omgeving kan voelen.
De zintuigen van ASIMO
 Foto met dank aan Honda Motor Co., Ltd.
Foto met dank aan Honda Motor Co., Ltd. Bij robotica, visie is een vastgelegd beeld dat wordt geïnterpreteerd op basis van geprogrammeerde Sjablonen . In een productieomgeving, waar robotarmen auto's bouwen of robots de microscopische verbindingen op halfgeleiderchips inspecteren, je hebt te maken met een gecontroleerde omgeving. De verlichting is altijd hetzelfde, de hoek is altijd hetzelfde, en er is een beperkt aantal dingen om naar te kijken en te begrijpen. In de echte (en ongestructureerde) wereld, echter, het aantal dingen om naar te kijken en te begrijpen neemt enorm toe.
Een humanoïde robot die door huizen moet navigeren, gebouwen, of buitenshuis tijdens het uitvoeren van taken, moet in staat zijn om de vele objecten die het 'ziet' te begrijpen. schaduwen, vreemde hoeken en bewegingen moeten begrijpelijk zijn. Bijvoorbeeld, om op eigen houtje een onbekend gebied in te lopen, een robot zou objecten in realtime moeten detecteren en herkennen, het selecteren van functies zoals kleur, vorm en randen om te vergelijken met een database met objecten of omgevingen waarvan hij weet. Er kunnen duizenden objecten in het 'geheugen' van de robot zijn.
ASIMO's vision-systeem bestaat uit twee basis videocamera's voor ogen, zich in zijn hoofd bevindt. ASIMO gebruikt stereoscopisch zicht en een eigen visie algoritme dat laat het zien, herkennen, en vermijd objecten tegen te komen, zelfs als hun oriëntatie en verlichting niet hetzelfde zijn als die in de geheugendatabase. Deze camera's kunnen meerdere objecten detecteren, afstand bepalen, beweging waarnemen, geprogrammeerde gezichten herkennen en zelfs handbewegingen interpreteren. Bijvoorbeeld, wanneer u uw hand naar ASIMO in een "stop" -positie houdt, ASIMO stopt. Met de gezichtsherkenningsfunctie kan ASIMO "bekende" mensen begroeten.
ASIMO kan bewegende objecten herkennen door de beelden te interpreteren die zijn vastgelegd door de camera's in zijn hoofd. Het kan de afstand en richting van een bewegend object beoordelen, waarmee ASIMO een persoon kan volgen, zijn eigen voortgang stoppen om een bewegend object zijn pad te laten kruisen, of begroet je als je nadert.
De camera's geven ook door aan de ASIMO-controller wat ASIMO ziet. Op die manier, als je ASIMO vanaf een pc bestuurt, je kunt zien wat ASIMO ziet.
Naast de camera's in zijn hoofd, ASIMO heeft verschillende sensoren die hem helpen door omgevingen te manoeuvreren en te communiceren met objecten en mensen. Met vloeroppervlaksensoren kan ASIMO objecten en veranderingen in de vloer detecteren. Ultrasone sensoren helpen ASIMO te oriënteren door omringende objecten te detecteren. De sensoren helpen ASIMO om discrepanties op te lossen tussen de interne kaart van het gebied dat voorgeprogrammeerd is in het geheugen en de werkelijke omgeving.
ASIMO heeft zelfs tastzin, op een manier. De krachtsensoren in de polsen van ASIMO stellen ASIMO in staat te beoordelen hoeveel kracht moet worden gebruikt bij het oppakken van een dienblad, u een dossier overhandigen of uw hand schudden. ASIMO kan informatie die door zijn camera's is verzameld, integreren en sensoren dwingen om synchroon met een persoon te bewegen terwijl ze elkaars hand vasthouden. Bij het duwen van een kar, ASIMO's krachtsensoren helpen de robot om de hoeveelheid kracht aan te passen die nodig is om de kar te duwen (bijvoorbeeld ASIMO kan een kar met meer kracht duwen als de sensoren een helling detecteren).
Een andere manier waarop ASIMO de omgeving kan voelen, is door het gebruik van IC-communicatiekaarten. IC-kaarten gebruiken infraroodsignalen om informatie te ontvangen en te verzenden. Als u in het bezit bent van een IC-kaart met uw gegevens erop gecodeerd, ASIMO kan uw aanwezigheid detecteren, zelfs als u zich niet binnen het gezichtsveld van de camera's bevindt. Deze kaarten verbeteren het vermogen van ASIMO om met anderen te communiceren. Bijvoorbeeld, als u het kantoor van Honda zou bezoeken en een IC-kaart als bezoekerspas zou ontvangen, ASIMO kan u begroeten en u naar de juiste kamer leiden nadat u de informatie op uw kaart elektronisch heeft gelezen.
Leen me je microfoonsEr zijn drie microfoons in het hoofd van ASIMO. Met behulp van deze microfoons, ASIMO kan spraakopdrachten ontvangen en de richting van het geluid detecteren. ASIMO kan bepalen waar het geluid vandaan komt en zich vervolgens in die richting draaien.
ASIMO besturen en aandrijven
ASIMO is geen autonome robot. Het kan geen kamer binnengaan en zelf beslissingen nemen over hoe te navigeren. ASIMO moet ofwel worden geprogrammeerd om een specifieke taak uit te voeren in een specifiek gebied met markeringen die het begrijpt, of het moet handmatig worden bestuurd door een mens.
ASIMO kan op vier manieren worden bestuurd:
- Draadloze controller (een soort van joystick)
- Gebaren
- Spraakopdrachten
Met behulp van 802.11 draadloze technologie en een laptop of desktopcomputer, je kunt ASIMO besturen en zien wat ASIMO ziet via zijn camera-ogen. ASIMO kan ook zijn pc-verbinding gebruiken om toegang te krijgen tot internet en informatie voor u op te halen, zoals weerberichten en nieuws.
De draadloze joystickcontroller bedient de bewegingen van ASIMO op dezelfde manier als een auto met afstandsbediening. Je kunt ASIMO vooruit laten gaan, achteruit, zijwaarts, diagonaal, op zijn plaats draaien, een hoek omlopen of rondjes rennen. ASIMO op afstand laten bewegen lijkt misschien niet zo geavanceerd, maar ASIMO heeft wel de mogelijkheid om: zelf de stappen aanpassen . Als je het hebt, loop dan naar voren, en het stuit op een helling of een soort obstakel, ASIMO past zijn treden automatisch aan het terrein aan.
ASIMO kan verschillende gebaren en lichaamshoudingen herkennen en erop reageren, waardoor gebruikers ASIMO non-verbaal kunnen bevelen. U kunt naar een bepaalde plek wijzen waar u ASIMO naartoe wilt laten lopen, bijvoorbeeld, en het zal uw voorbeeld volgen. Als je naar ASIMO zwaait, het zal met een eigen golf reageren. Het kan zelfs herkennen wanneer je zijn hand wilt schudden.
ASIMO kan eenvoudige, voorgeprogrammeerde verbale commando's. Het aantal commando's dat in het geheugen kan worden geprogrammeerd, is praktisch onbeperkt. U kunt uw stem ook laten registreren in de programmering, waardoor het voor ASIMO gemakkelijker wordt om u te herkennen.
Naast de spraakopdrachten voor het besturen van de bewegingen van ASIMO, er zijn ook gesproken commando's waarop ASIMO verbaal kan reageren. Dit is de functie die het voor ASIMO mogelijk heeft gemaakt om als receptioniste te werken, bezoekers begroeten en vragen beantwoorden.
Net als de meeste andere technologieën op het gebied van robotica, ASIMO wordt mogelijk gemaakt door servomotoren . Dit zijn kleine maar krachtige motoren met een roterende as die ledematen of oppervlakken naar een specifieke hoek beweegt zoals aangegeven door een controller. Zodra de motor in de juiste hoek is gedraaid, het wordt uitgeschakeld totdat het de instructie krijgt om opnieuw te draaien. Bijvoorbeeld, een servo kan de hoek van het armgewricht van een robot regelen, houd het in de juiste hoek totdat het moet bewegen, en dan die beweging controleren. Servo's gebruiken een positiegevoelig apparaat (ook wel digitale decoder genoemd) om ervoor te zorgen dat de as van de motor op de goede plek zit. Ze gebruiken meestal een vermogen dat evenredig is aan de mechanische belasting die ze dragen. Een licht geladen servo, bijvoorbeeld, verbruikt niet veel energie.
ASIMO heeft 34 servomotoren in zijn lichaam dat zijn torso beweegt, armen, handen, poten, voeten, enkels en andere bewegende delen. ASIMO beheert een reeks servomotoren om elk soort beweging te besturen.
ASIMO wordt aangedreven door een oplaadbare, 51,8 volt lithium-ion (Li-ION) batterij die lang meegaat een uur op een enkele lading. De batterij is opgeslagen in ASIMO's rugzak en weegt ongeveer 13 pond . ASIMO's batterij duurt drie uren volledig opladen, dus een tweede (en derde) batterij is cruciaal als je ASIMO heel lang nodig hebt. Gebruikers kunnen de batterij aan boord van ASIMO opladen via een stroomaansluiting of de rugzak verwijderen om apart op te laden.
Robotcompetities
- RoboCup Wereldbeker robotvoetbal
- Federatie van Internationale Robosoccer Association
- MechWars
- EERST
- AUVSI-competities
- MATE ROV-competitie
Honda Research Institute en ATR Computational Neuroscience Laboratories werkten in 2006 samen om een manier te ontwikkelen om ASIMO door gedachten te beheersen. Wetenschappers en ingenieurs gebruikten een MRI-machine om de hersenpatronen van een proefpersoon vast te leggen bij het maken van een reeks handgebaren (een gesloten vuist en het "V"-vredesteken). De opname werd vervolgens doorgestuurd naar een robothand, die de informatie decodeerde en de gebaren van het onderwerp dupliceerde. Omdat het MRI-systeem niet-invasief was, er was geen noodzaak voor chirurgische ingrepen.
Honda hoopt dat dit de eerste stap is in de ontwikkeling van een systeem waarmee verlamde mensen apparaten zoals ASIMO kunnen bedienen door er simpelweg aan te denken. Er moet veel meer onderzoek worden gedaan om gebruikers in staat te stellen complexe taken uit te voeren en een kleinere, lichtgewicht apparaat om hersenpatronen vast te leggen.
Benieuwd naar servo's?Bekijk de inleiding tot servomotoren van het Northwestern University Mechatronics Design Laboratory.
Lees verder
ASIMO's levensverhaal
Honda begon in 1986 met de ontwikkeling van zijn humanoïde helperrobot. Honda-ingenieurs wisten dat de robot gemakkelijk door een huis of gebouw moest kunnen navigeren, en dat betekende dat de looptechniek perfect moest zijn. Daarom, hun eerste pogingen waren eigenlijk dozen met poten. Toen het loopmechanisme grotendeels ontwikkeld was, armen, handen en ten slotte werd een hoofd toegevoegd.
De ASIMO-tijdlijn
- 1986 - Statisch lopen De eerste robot die Honda bouwde heette EO . EO liep heel langzaam, soms 20 seconden nodig hebben om een enkele stap te voltooien. Dit kwam omdat EO deed wat 'statisch wandelen' werd genoemd. Bij statisch lopen, nadat de robot een voet naar voren begint te bewegen, het moet wachten tot het zijn gewicht op die voet heeft gebalanceerd voordat het de andere voet naar voren begint te bewegen. Mensen lopen niet op die manier, dus ging het onderzoek verder.
- 1987 - Dynamisch wandelen Inmiddels hadden ingenieurs een methode ontwikkeld voor "dynamisch wandelen, " wat veel menselijker is. Met deze looptechnologie, de robot (nu genoemd prototype E1 , spoedig gevolgd door E2 en E3 naarmate het onderzoek vorderde) leunde naar de volgende stap, zijn gewicht verplaatsen en de andere voet naar voren bewegen om zichzelf op te vangen zodat in plaats van naar voren te vallen, het liep vooruit.
- 1991 - Lopen als een pro In prototypes E 4 , E5 en E6 , Honda's ingenieurs perfectioneerden het loopmechanisme tot het punt waarop de robot gemakkelijk op een helling kon lopen, trappen op en op oneffen terrein. Omdat echt lopen als mens eigenlijk het gebruik van het lichaam vereist, armen en hoofd, ingenieurs moesten doorgaan naar de volgende stap en de rest van het lichaam toevoegen.
- 1993 - Een meer mensachtige robot Met een lichaam, armen, handen en een hoofd, de volgende generatie prototypes ( P1 , P2 en P3 ) leek meer op een 'humanoïde'. P1, echter, was een dreigende 6 voet 2 inch (188 cm) lang en woog 386 pond (175 kg). P2 werd iets in hoogte verkleind, maar woog een nog zwaardere 463 pond (210 kg) - niet iets dat je op je tenen wilt trappen in de keuken. Echter, het kan heel goed lopen op oneffen oppervlakken, hellingen, en kon zelfs voorwerpen grijpen en karren duwen. P2 kan zelfs zijn evenwicht behouden als hij wordt ingedrukt. Eindelijk, P3 is gebouwd op een meer comfortabele (en minder angstaanjagende) 5 voet 2 inch (157 cm) hoog. Met een gewicht van 287 pond (130 kg), P3 zou sneller en soepeler kunnen lopen dan zijn voorgangers.
- 1997 - ASIMO Er werden nog meer verbeteringen aangebracht aan het loopsysteem, waardoor ASIMO in bijna elke omgeving gracieus en gemakkelijk kan lopen. Dankzij geavanceerde heupgewrichten kon ASIMO soepel draaien - iets wat andere robots moeten stoppen en schuifelen om te doen. Bij het nadenken over hoe ASIMO moest worden gebruikt, de ingenieurs hebben de beslissing genomen om de grootte van ASIMO verder te verkleinen tot 4 voet (122 cm), zodat het niet alleen niet intimiderend zou zijn voor mensen die zitten (of staan, wat dat betreft), het zou eigenlijk bij zijn ooghoogte . Deze hoogte maakte het voor ASIMO ook mogelijk om op tafelhoogte of achter een computer te werken, lichtschakelaars bereiken en deurknoppen draaien. ASIMO is erg sterk maar lichtgewicht magnesium legering lichaam, bedekt met plastic "huid, " woog slechts 52 kg. Technologie genaamd " voorspelde bewegingscontrole " ASIMO kon zijn volgende beweging automatisch voorspellen en zijn gewicht verplaatsen om een bocht te maken. ASIMO's pas kon ook in realtime worden aangepast om hem sneller of langzamer te laten lopen. P2 en P3 moesten geprogrammeerde looppatronen gebruiken.
- 2005 - Beter, sneller, sterker Ingenieurs verfijnden het bewegingssysteem van ASIMO verder, het verhogen van de loopsnelheid van 2,5 tot 2,7 kilometer per uur en het geven van ASIMO de mogelijkheid om te rennen met snelheden tot 6 kilometer per uur. Honda verhoogde ASIMO's hoogte tot 4 voet 3 inch (130 centimeter), en de robot werd een beetje zwaarder, het kantelen van de weegschaal op 119 pond. De ingenieurs schakelden ASIMO's voeding om naar een lithium batterij dat verdubbelt de hoeveelheid tijd die het kan gebruiken voordat het wordt opgeladen. Ze implementeerden ook de IC-communicatie kaarttechnologie die ASIMO helpt om met mensen te communiceren. Dankzij nieuwe sensoren kon ASIMO synchroon met mensen bewegen terwijl ze elkaars hand vasthielden.
ASIMO's peers
 Foto beleefdheid
Foto beleefdheid Naast ASIMO, er zijn een aantal andere behoorlijk geavanceerde humanoïde robots die veel van dezelfde dingen lijken te doen. De meeste zijn gebouwd op een veel kleinere schaal en zijn meer bedoeld voor amusement dan dienst. Direct, ASIMO's grootste concurrentie op het gebied van technologie lijkt te zijn:
- HRP-2 . van Kawada Industries
- De QRIO-robot van SONY
- Fujitsu's HOAP-serie
- ZMP-robots
- Toyota-robots
- Actroid van Kokoro Company
Er worden ook verschillende robots gebruikt in ziekenhuizen over de hele wereld die door gangen navigeren en liften nemen om patiëntendossiers af te leveren, röntgenstralen, medicijnen en andere dingen in het hele ziekenhuis. Ze rijden op wielen en zijn geprogrammeerd met de ziekenhuislay-out of ze identificeren en volgen markeringen en streepjescodes die op de muren zijn geplaatst.
Sinds de jaren zestig worden robots op veel gebieden gebruikt. Nu computerprocessors steeds krachtiger worden en technologie in robotica zich naar nieuwe gebieden uitbreidt, het zal niet lang meer duren voordat we een "Rosie" hebben om onze maaltijden te koken en onze huizen schoon te maken.
Voor meer informatie over ASIMO en andere robots, evenals de technologische vooruitgang die humanoïde robots mogelijk maakt, bekijk de links op de volgende pagina.
Een robot over de stadASIMO heeft het publiek gecharmeerd bij media-evenementen, televisieprogramma's, en zelfs Disneyland. Misschien heb je ASIMO gezien:
- Luid de openingsbel op de New York Stock Exchange in 2002
- Geëerd door de Robot Hall of Fame in 2004
- Loop over de rode loper bij de première van "Robots:The Movie"
- Speel een ondersteunende rol in "Update 2056:The World in 50 Years"
- Dans met Ellen op "The Ellen DeGeneres Show"
- Vermaak en onderwijs menigten in Disneyland's "Say Hello to ASIMO" attractie
- Word vervalst op "South Park" toen Eric Cartman zichzelf vermomde als "Awesome-O"
Veel meer informatie
Gerelateerde HowStuffWorks-artikelen
- Hoe robots werken
- Hoe FIRST werkt
- Hoe Rumble-robots werken
- Hoe Snakebots zullen werken
- Hoe robotchirurgie zal werken
- Hoe robotstofzuigers werken
- Hoe elektrische motoren werken
- Hoe kan iemand een machine besturen met haar gedachten?
- Hebben wetenschappers een manier gevonden om je gedachten te lezen?
Meer geweldige links
- Honda:ASIMO
- Robots die springen
- MIT Kunstmatige Intelligentie Laboratorium
- NASA:Robotica-educatieproject
- Het Tech Museum of Innovation
bronnen
- ASIMO http://asimo.honda.com
- "ASIMO in Praag." Robotika.cz, 26 augustus 2003. http://robotika.cz/articles/asimo/en
- ASIMO technische handleiding:Honda Motor Company http://asimo.honda.com/downloads/pdf/asimo-technical-information.pdf
- D'Aluisio, Faith en Peter Menzel. "Evolutie van een nieuwe soort:Robo Sapiens." MIT Pers, 2000.
- "Ziekenhuisdragers gaan robotachtig." Verloofd, 24 juni 2004. http://robots.engadget.com
- Kageyma, Joeri. "Honda bedenkt manier voor hersensignalen om robot te besturen." VS vandaag, 24 mei, 2006 http://www.usatoday.com/tech/news/robotics/ 2006-05-24-robot-brain_x.htm
- MIT laboratorium voor kunstmatige intelligentie http://www.ai.mit.edu
- NASA:Robotics Education Project http://robotics.nasa.gov
- "The New Age of Service Robots:van het blussen van branden tot het serveren van bier." Kennis bij Wharton, De Whartonschool, Universiteit van Pennsylvania, 20 november 2002.
- Patent # 6016962:IC-communicatiekaarten. United States Patent and Trademark Office. http://www.uspto.gov
- Robot Hall of Fame http://www.robothalloffame.org
- Robotica Online http://www.roboticsonline.com
- Schulte, Bret. "ASIMO:Honda's nieuwe compact komt in vrede:het is niet de beste vriend van de mens, Maar het is ook geen Terminator." Washington Post, 3 augustus 2002.
- Het Tech Museum of Innovation http://www.thetech.org/robotics
- TrueForce:geschiedenistijdlijn van robotica http://trueforce.com/Articles/Robot_History.htm
- "Computers begrijpen:robotica." Tijd-leven boeken, 1986.

Hoofdlijnen
- Welke organellen worden beschouwd als het cellen recyclingscentrum?
- Hoe de percentages van adenine in een DNA-streng te berekenen
- Hoe werkt ADP naar ATP?
- Flagella: soorten, functie en structuur
- Een driedimensionaal DNA-model maken voor de biologie van de middelbare school
Door een model van een DNA-helix in de klas te bouwen, kunnen studenten de constructie van DNA beter visualiseren en meer te weten komen over de levengevende genetische
- Definieer Contrast in microscopen
- Een driedimensionaal model van een plantencel maken met labels
- Soorten bacteriën in het bloed
- Mutualisme (biologie): definitie, types, feiten en voorbeelden






 Hoe kan ik honing uit een wilde bijenkorf extraheren?
Hoe kan ik honing uit een wilde bijenkorf extraheren? - Een Chromosome-diagram interpreteren
- Hoe de hoogste ionisatie-energie te bepalen
- De afstand tussen twee nummers op een getallenlijn bepalen
Een langzame manier om de afstand tussen getallen op een getallenlijn te berekenen, is door elk getal ertussen te tellen. Een eenvoudigere, snellere manier is om de afstand te vinden door
- Hoe zich te ontdoen van Salamanders
- De chemie van Rock Candy
- Georgia Aquarium:grootste ter wereld
- Hoe een fractionele destillatiekolom te bouwen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
