Wetenschap
vloot van lucht, oppervlakte, en onderwaterrobots brengen oceaanfront in kaart

Een Flightwave Edge UAV, bestuurd door Trent Lukaczyk, vliegt richting R/V Falkor. Het onbemande luchtvoertuig werkte samen met onderwaterrobotica en de bemanning aan boord van het schip om gegevens te verzamelen. Krediet:Schmidt Ocean Institute
Meerdere autonome voertuigen tegelijk gebruiken, een interdisciplinair team van wetenschappers en ingenieurs keert terug naar de Verenigde Staten na het verkennen van het subtropische front in de Noordelijke Stille Oceaan - een scherpe grens waar koud zoet water uit het noorden en warm zout water uit het zuiden elkaar ontmoeten. De fronten zijn de meest opvallende oceanografische fenomenen en het doel van dit project was om het gebruik van gedistribueerde autonome robotica te demonstreren om te detecteren, spoor, en karakteriseren van deze complexe en dynamische processen met hoge nauwkeurigheid over grote ruimtelijke en temporele schalen.
Het samenbrengen van lucht, oppervlakte, en onderwaterrobotvoertuigen met ondersteuning van het onderzoeksschip Falkor, liet het team lokaliseren, kaart, en verken de voorkant. Er werd ongeveer 1 gedetecteerd 000 zeemijl uit de kust van Zuid-Californië enkele dagen voor de aankomst van het onderzoeksteam met behulp van autonome oppervlaktevoertuigen. Meerdere goedkope onderzeeërs, oppervlakte, en luchtrobots sloten zich aan bij de verkenning aan de voorkant vanuit Falkor. Het resulterende gedistribueerde robotsysteem en het intelligente sensornetwerk hielpen het onderzoeksteam om het complexe oceaanfront dynamisch te volgen, op een gemakkelijkere, sneller, en meer kosteneffectieve manier die mogelijk zou zijn met traditionele middelen, zoals alleen vertrouwen op schepen.
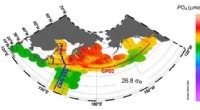
Satellietwaarnemingen zijn vaak niet voldoende om het voortdurend veranderende oceaansysteem te volgen. Om in de eerste plaats het Noord-Pacifische front te lokaliseren, deze internationale groep wetenschappers en ingenieurs onder leiding van Dr. Joao Borges de Sousa, van het Laboratorio de Sistemas e Tecnologia Subaquatica (LSTS) van de Universiteit van Porto heeft een WaveGlider en twee Saildrones ingezet in het onderzoeksgebied voordat het schip arriveerde. Dankzij de gegevens die ze via de satelliet verzamelden en naar Falkor stuurden, kon de onderzoekspartij de implementatieplannen voor alle autonome voertuigen optimaliseren. inclusief die welke zijn afgeleverd door en ingezet vanaf het schip. Intelligente besturingssoftware voor meerdere voertuigen, Oceaan Ruimtecentrum, ontwikkeld bij LSTS en ingezet op Falkor, werd tijdens de cruise verfijnd om de operaties van alle ingezette robots automatisch te optimaliseren en de besturing van de robotvloot voor menselijke operators te vergemakkelijken. Voor de eerste keer ooit, een deel van een groot open oceaanfront werd in kaart gebracht met sub-mesoschaal resolutie met behulp van een gecontroleerde vloot van tientallen autonome robots. Deze gedetailleerde kaart van het oceaanfront, dynamisch samengesteld uit de verkregen gegevens, stelde wetenschappers in staat om hotspots te identificeren waarin gecoördineerde scheepsrobotonderzoeken werden uitgevoerd met adaptieve ruimtelijke en temporele resolutie.

De autonome voertuigen - in de lucht en onder water - die worden gebruikt door het Ocean Robots Team, bekleden het achterdek van R/V Falkor. Krediet:Schmidt Ocean Institute
Het bedienen van meerdere activa in open zee kan moeilijk zijn, maar in minder dan drie weken, de onderwaterrobots reisden over 1, 000 zeemijl gedurende ongeveer 500 uur, terwijl de autonome oppervlaktevoertuigen continu in bedrijf waren, en de onbemande luchtvaartuigen voerden meer dan 25 vluchten uit van in totaal 10 uur. Dit project demonstreert een nieuwe benadering voor het distribueren van de waarnemingen van complexe oceaandynamiek over meerdere onderwater-, oppervlakte, en luchtvoertuigen. In plaats van bemonstering van één vat op één locatie, Onderzoekers kunnen nu een veel groter gebied met een hoge resolutie in ruimte en tijd monitoren op een schaalbare en kostenefficiënte manier met behulp van een genetwerkte vloot van robotvoertuigen die worden ondersteund door een op schepen gebaseerd commandocentrum.
"Ik denk dat het essentieel is voor de mensheid om het grote geheel te begrijpen, omdat, uiteindelijk, we hebben het over het levensondersteunende systeem voor de aarde, " zei João Sousa. "De oceanen zijn een belangrijk onderdeel van dat levensondersteunende systeem en ze zijn niet zo enorm groot als mensen geneigd zijn aan te nemen. In feite, als al het water van de oceanen in een bel zou worden gestopt, de meesten van ons zouden stomverbaasd zijn om te zien hoe indrukwekkend klein het eruit ziet in vergelijking met de grootte van de aarde. En, nog, de wetenschap mist nog steeds de technologie en hulpmiddelen om de algehele gezondheid en het functioneren van de oceanen te bestuderen. "
Om een duurzame aanwezigheid in de oceanen mogelijk te maken, de groep ontwikkelde hun specifieke software genaamd Neptus en Ripples verder, de software achter het Open Space Center, waarmee ze de robots in realtime konden bekijken en besturen, het verkrijgen van geavanceerd situationeel bewustzijn, visualisatie op afstand, en controle, allemaal via internet. Met deze softwaretoolchain konden ze het geheel van voertuigen op verschillende ongekende manieren besturen, met name non-stop voor het grootste deel van de expeditie met slechts één operator.
Geleerde lessen en behaalde resultaten tijdens deze cruise kunnen worden toegepast op andere frontale regio's, evenals voor andere verschijnselen van de wereldoceaan. Dus, de technologieën die tijdens deze expeditie zijn gedemonstreerd, zullen ons helpen te begrijpen en te monitoren hoe belangrijke kwesties zoals klimaatverandering, oceaanverzuring, niet-duurzame visserij, vervuiling, verspilling, verlies van habitats en biodiversiteit, Verzending, veiligheid, en mijnbouw beïnvloeden de wereldwijde duurzaamheid en rentmeesterschap van de oceaan.
 El Salvador verbiedt metaalwinning in wereldprimeur
El Salvador verbiedt metaalwinning in wereldprimeur- Meer dan een miljoen getroffen door moessonoverstromingen in India
- Zuid-Chinese Zee blijkt verhoogde niveaus van antropogene oppervlaktestikstof te hebben
- Maïs met een laag gras:de beste combinatie vinden voor maïs op biobrandstof, bodembescherming
- Stervende wind geeft bemanning hoop bij branden in Noord-Californië
Hoofdlijnen
- Vogels onthullen het belang van goede buren voor gezondheid en veroudering
- Kill-schakelaars voor gemanipuleerde microben die schurkenstaten zijn geworden
- 10 manieren om jezelf gelukkig te maken
- Chloroplasten zijn de plantencellen die energie produceren
- Onderzoekers schijnen de schijnwerpers op illegale handel in wilde orchideeën
- Wat gebeurt er met een Zygote na de bevruchting?
- Zouttolerante planten kweken
- Parasieten en gastheren kunnen anders reageren op een warmere wereld
- Biologisch onderzoek suggereert dat voeding van vaders vóór seks kan bijdragen aan de gezondheid van de baby
- De reactie van moessonregens op vulkaanuitbarstingen is afhankelijk van ENSO-staten vóór de uitbarsting

- Subpolaire marginale zeeën spelen een sleutelrol bij het voedselrijk maken van de subarctische Stille Oceaan
- Wat gebeurt er als u water geeft met frisdrank?

- Een uitgebalanceerd ecosysteem gebruikt water het meest efficiënt

- Het afvoeren van bioafval van COVID-19 niet beperkt tot verbranding


 Dertig jaar unieke gegevens onthullen wat koraalriffen echt doodt
Dertig jaar unieke gegevens onthullen wat koraalriffen echt doodt- Machine learning ontdekt nieuwe sequenties om medicijnafgifte te stimuleren
- Zoeken naar donkere materie levert techniek op voor het lokaliseren van naden van zware metalen
- Grote doorbraak in kwantumcomputers zet natuurkunde en wiskunde op z'n kop
- De reactiesnelheid berekenen
- Onderzoekers testen Lamborghini's koolstofvezelmaterialen in de ruimte
- Astronomen vinden mogelijke oplossing voor de vorming van planeten
- Tsunami's kunnen strandtoerisme jaarlijks honderden miljoenen dollars kosten
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
