Wetenschap
Wat is het beste ontwerp voor een vliegende Mars-robot?
1. Aerodynamische efficiëntie :De atmosfeer van Mars is erg dun, met een luchtdichtheid aan het oppervlak van slechts ongeveer 1% van die van de aarde. Daarom moet de vliegende robot worden ontworpen met een zeer aerodynamische vorm om de weerstand te minimaliseren en de lift te maximaliseren. Dit kan worden bereikt door het gebruik van lichtgewicht materialen, gestroomlijnde contouren en efficiënte vleugelontwerpen.
2. Lichtheid :Vanwege de lage zwaartekracht op Mars (ongeveer 38% van die van de aarde), kan de vliegende robot relatief licht zijn vergeleken met zijn tegenhangers op aarde. Lichtgewicht constructie is cruciaal voor het bereiken van voldoende lift en tegelijkertijd het minimaliseren van het benodigde vermogen voor de vlucht.
3. Vlucht op zonne-energie :Zonne-energie is een betrouwbare energiebron voor langdurige missies op Mars. De robot moet worden uitgerust met efficiënte zonnepanelen en een energiebeheersysteem dat zonne-energie kan opvangen en opslaan voor continu gebruik.
4. Autonome navigatie en bediening :De vliegende robot moet in staat zijn tot autonome navigatie om interessante gebieden efficiënt te bestrijken en gewenste manoeuvres uit te voeren. Geavanceerde beeldvormingssystemen, terreinkartering en algoritmen voor het vermijden van obstakels zijn noodzakelijk voor een veilige en nauwkeurige vlucht.
5. Landing en mobiliteit :De robot moet veilig kunnen landen op het oneffen en stoffige terrein van Mars. Hiervoor zijn mogelijk robuuste landingsgestellen, schokdempers en strategieën nodig om de ophoping van stof op kritieke systemen tot een minimum te beperken. Bovendien zou de robot kunnen worden uitgerust met extra mobiliteitssystemen, zoals wielen of een springmechanisme, om gebieden te verkennen die niet alleen per vlucht toegankelijk zijn.
6. Wetenschappelijke instrumentatie :De lading van de vliegende robot zal afhangen van zijn wetenschappelijke doelstellingen. Het kan een reeks instrumenten bevatten voor atmosferische studies, oppervlaktebeeldvorming, mineraalanalyse of het zoeken naar tekenen van vorig leven. Het integreren van deze instrumenten binnen een compact ontwerp zonder afbreuk te doen aan de vliegprestaties is essentieel.
7. Communicatiesystemen :De vliegende robot moet robuuste communicatiesystemen hebben om gegevens te verzenden en instructies te ontvangen van de missiecontrole op aarde. Hierbij kan het gaan om antennes met hoge versterking voor langeafstandscommunicatie en datarelais-satellieten in een baan rond Mars.
Door deze ontwerpelementen zorgvuldig te overwegen en gebruik te maken van de vooruitgang op het gebied van lucht- en ruimtevaarttechniek en autonome systemen, is het mogelijk een succesvolle vliegende Mars-robot te creëren die de rode planeet op ongekende manieren kan verkennen.
 Metalen nanokatalysatoren imiteren de structuur van enzymen
Metalen nanokatalysatoren imiteren de structuur van enzymen- Inspirerende ontdekking van nieuwe medicijnen door pseudo-natuurlijke producten
- Sterkste soorten lijm
- De puzzel voor het ontwerpen van medicijnen voltooien
- Onderzoekers rapporteren succesvolle synthese van specifieke chirale moleculen met behulp van herschikkingen van eenvoudige koolwaterstoffen
- Wetenschappers brengen zeewaterbedreiging in kaart voor aquifers aan de centrale kust van Californië
- De intensiteit van de trots die mensen voelen voor een bepaalde handeling of eigenschap wordt bepaald door een impliciete mentale kaart van wat anderen waarderen
- Groene infrastructuur om intenser regenwater te beheren met klimaatverandering
- Methaanbellen zijn effect en oorzaak van temperatuurstijging
- Vorming van gletsjermoulin veroorzaakt door snelle afwatering van meren
Hoofdlijnen
- Kan artrose het humeur van een hond beïnvloeden?
- Het testen van chimpansees in Tanzania gedurende tientallen jaren suggereert dat persoonlijkheidstypes stabiel zijn
- Ryk heeft een begeleider nodig
- Waarom restaurants willen dat je eten bestelt op je telefoon
- Onderzoek verklaart waarom hennep en marihuana verschillend zijn
- Hoe nematoden de verdediging van ongedierte te slim af zijn
- Kunnen stereotypen worden gekwantificeerd?
- Seizoensgebonden afbeeldingen onthullen de wetenschap achter stamcellen
- De productie van recombinante menselijke groeihormonen door Recombinant DNA Technology
- Strakke druk voor jonge professionals uit Hong Kong

- In Indonesië, jong en oud delen nepnieuws op sociale media

- Daimler roept meer auto's terug vanwege fraude met emissies:rapport

- Hersenachtig netwerk gebruikt wanorde om orde te detecteren
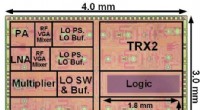
- Nieuwe 28-GHz transceiver maakt de weg vrij voor toekomstige 5G-apparaten

 Onderzoeker creëert chemisch systeem dat vroeg celgedrag nabootst
Onderzoeker creëert chemisch systeem dat vroeg celgedrag nabootst- COVID-19-gerelateerde vreemdelingenhaat
- Stranden open na lekkage van rioolwater aan de centrale kust van Californië
- Theoretisch onderzoek toont aan dat materie de neiging heeft om bij lage temperaturen te worden geordend
- Materialen verhoogde capaciteit, efficiëntie kan de lat voor waterstoftechnologie verlagen
- Onderzoekers ontwikkelen ionenversnellingsmethode voor verbeterde kankerbehandeling
- Binaural Beats:kalmeert deze auditieve illusie je hersenen echt?
- Effecten van klimaatverandering op gemeenschappelijk beheerde watersystemen verzacht door gezamenlijke inspanning
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
