Wetenschap
Een cyborg-kakkerlak kan ooit je leven redden
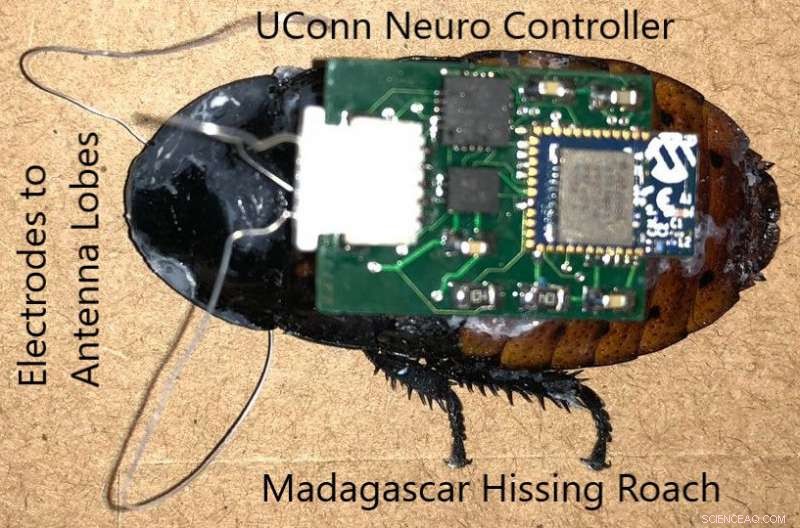
Een kakkerlak met een geïmplanteerde neurocontroller. Krediet:het Dutta Lab
Een kakkerlak niet groter dan een grote paperclip rent over de vloer van Abhishek Dutta's lab aan de Universiteit van Connecticut.
Sommige wetenschappers zullen geschokt zijn als ze zien dat zo'n beruchte bezoeker hun onderzoeksruimte bezet.
Maar Dutta niet. Hij kijkt aandachtig toe terwijl de kakkerlak naar links beweegt, en dan goed, dan weer links, terwijl het de koele tegelvloer doorkruist. Zijn interesse is gegrond, want hij is degene die de bewegingen van het kleine schepsel initieert met een klein handheld-apparaat op ongeveer 5 meter afstand.
De sissende kakkerlak uit Madagaskar in dit lab is niet zomaar een oud lid van de orde Blattodea. Het is een hybride robot-voorn, een vast bedrade biologisch insect - een cyborg als je wilt - en zijn toekomstige hightech broeders kunnen op een dag je leven redden.
"Het gebruik van insecten als platform voor kleine robots heeft ongelooflijk veel nuttige toepassingen, van zoek- en reddingsacties tot nationale defensie, " zegt Dutta, een assistent-professor in elektrische en computertechniek die gespecialiseerd is in optimalisatie van besturingssystemen en cyberfysieke systemen.
Kakkerlakkenrobots zijn niet nieuw, echter. Onderzoekers hebben het afgelopen decennium biorobotische platforms voor insecten onderzocht. Maar het bouwen van robotsystemen op zo'n miniatuurschaal is niet eenvoudig, en de technologie lijkt maar ongeveer de helft van de tijd te werken.
In een paper dat binnenkort verschijnt in Proceedings of the Conference on Cognitive Computational Neuroscience , Philadelphia 2018, Doet, en student Evan Faulkner, een junior die in zijn lab werkt, rapporteren hun oprichting van een microcircuit dat volgens hen een betrouwbaardere en nauwkeurigere controle van de beweging van robotinsecten mogelijk maakt.
Om de bestrijding van het insect te verbeteren, Dutta's microcircuit bevat een 9-assige traagheidsmeeteenheid die de zes graden vrije beweging van de voorn kan detecteren, zijn lineaire en roterende versnelling, en zijn kompasrichting. Een ander kenmerk dat Dutta en Faulkner hebben toegevoegd, is de omgevingstemperatuur rond het wezen, omdat uit tests is gebleken dat de temperatuur van de omgeving waarin een kakkerlak zich beweegt, van invloed kan zijn op hoe en waar het insect zich beweegt. kakkerlakken, Voor de goede orde, gaan eerder wandelen als het warm is.
De microschakeling die Dutta en Faulkner maakten, maakt deel uit van een kleine elektronische 'rugzak' die aan de rug van een kakkerlak kan worden vastgemaakt. Draden van het apparaat zijn bevestigd aan de antennelobben van het insect. Met een kleine Bluetooth-zender en -ontvanger kan een operator in de buurt de bewegingen van de kakkerlak via een gewone mobiele telefoon regelen. Door kleine elektrische impulsen naar het zenuwweefsel in de rechter of linker antennekwab van het insect te sturen, denkt het insect dat het een obstakel is tegengekomen. Een kleine lading aan de linkerantenne zorgt ervoor dat het insect naar rechts weg beweegt. Hetzelfde, een lading die naar de rechterantenne wordt gestuurd, zorgt ervoor dat het insect naar links beweegt. Het is opnieuw gedefinieerde stuurbekrachtiging.
Terwijl andere laboratoria soortgelijke controlesystemen hebben ontwikkeld, Het microcircuit van UConn onderscheidt zich doordat het operators een grotere mate van controle biedt over de beweging van het insect, realtime feedback van de neuromusculaire reactie van het insect op kunstmatige stimuli, en meerkanaalswegen voor het stimuleren van het zenuwweefsel van het insect. Het resultaat is een beter geïnformeerd en nauwkeurig controlesysteem.
Met de microcontroller en ingebouwde potentiometer van het UConn-systeem kunnen operators de uitgangsspanning variëren, frequentie, en cyclus van de stimuli die naar het insect worden gestuurd. (Een potentiometer, als je je afvraagt, is de eigennaam van een elektronisch apparaat dat de spanning aanpast. Het is het ding dat lichtdimmerschakelaars mogelijk maakt, en stelt u in staat om het volume op uw stereo aan te passen.) De stimulus die resulteerde in de meest robuuste reactie van de kakkerlak was ongeveer 1,2 V amplitude, 55 Hz frequentie, en 50 procent inschakelduur. (Er werden geen kakkerlakken gekwetst door deze experimenten, trouwens.)
Een interessant weetje dat de onderzoekers opmerkten, was dat de bewegingen van de kakkerlak naar links of rechts als reactie op kunstmatige stimulatie in intensiteit afnamen na de eerste stimulus. Dus als de kakkerlak een harde bocht naar links maakte nadat de eerste elektronische puls zijn rechter antennelob had geraakt, zijn beurt was minder dramatisch bij elke volgende puls naar die kwab. De onderzoekers weten niet zeker waarom dit gebeurt, maar het is wel handige informatie om te weten wanneer jij degene bent die stuurt.
Het belangrijkste is, Dutta zegt, het systeem stelde gebruikers in staat om de realtime feedback te gebruiken die via het Bluetooth-systeem werd verzonden om specifieke parameters in te stellen voor het stimuleren van de antennelobben van het insect, en dat stelde hen in staat om het insect in een gewenste richting te sturen.
"Onze microschakeling biedt een geavanceerd systeem voor het verkrijgen van realtime gegevens over de richting en versnelling van een insect, waarmee we zijn traject kunnen extrapoleren, "zegt Dutta. "Wij geloven dat deze geavanceerde gesloten lus, modelgebaseerd systeem biedt betere controle voor nauwkeurig manoeuvreren, en overwint enkele van de technische beperkingen die momenteel de microrobots van vandaag teisteren."
Hoewel de nieuwe microschakeling zeker een stap voorwaarts is voor robotinsectentechnologie, Dutta erkent dat er veel meer onderzoek nodig is. Insect-gedreven biobots, je zou kunnen zeggen, zijn nog in hun larvale stadium. Voortdurende vooruitgang in het ontwerp van microhardware en microcontrolesystemen zou kunnen leiden tot een nieuwe generatie apparaten die nog beter werken.
 Onderzoekers demonstreren nieuwe manieren om selectiviteit voor biomarkers in bio-elektronica te bereiken
Onderzoekers demonstreren nieuwe manieren om selectiviteit voor biomarkers in bio-elektronica te bereiken- Theoretische opbrengst berekenen
- Computermodellen voegen pit toe aan alternatieven voor gekweekt vlees
- Nieuw proces voor het produceren van hoogspanningskathodes voor lithium-ionbatterijen
- Moeten onderwijs en communicatie over de vooruitgang van microfluïdica worden verbeterd?
- Studieprojecten een sleutelrol voor koolstofafvang en -opslag in China
- Architectuur van Eolische successies onder ijshuis- en kasomstandigheden
- Wat zijn enkele overeenkomsten tussen zee- en zoetwaterecosystemen?
- Een opwarmende wereld verhoogt de luchtvervuiling
- Meer dan hamburgers:Azië geeft een draai aan alternatief vlees
Hoofdlijnen
- Gescheiden sinds de dinosauriërs, bamboe-etende lemuren, panda's delen gemeenschappelijke darmmicroben
- Verschil tussen plantaardige en dierlijke celdeling
- Anthrax heeft mogelijk 100 nijlpaarden gedood in Namibië
- Het motoreiwit danst in al onze cellen
- Hoe beïnvloedt CO2 de opening van de huidmondjes?
- Hittetolerante broccoli voor de toekomst
- Voorbeelden van diffusie in organen
- Hoe biologische antropologie werkt
- Wetenschapsprojecten: roken en de effecten ervan op de longen
- Gepulseerde elektrische veldtechnologie biedt nieuwe mogelijkheden voor voedselverwerking

- Taiwans nieuwe luchtvaartmaatschappij StarLux tekent deal met Airbus voor 17 vliegtuigen

- Walmart, Microsoft werkt samen om Amazon te verslaan

- Waarom je nog geen 5G-telefoon nodig hebt

- Evaluatiemethode voor de impact van fluctuaties in windenergie op de kwaliteit van het elektriciteitssysteem

 Golfeigenschappen van deeltjes kunnen zich manifesteren in botsingen
Golfeigenschappen van deeltjes kunnen zich manifesteren in botsingen- Hoe stroomt energie door een voedselketen?
- De nauwkeurigheid van metingen berekenen
- De duikklokspin nabootsen om de omzetting van koolstof in brandstoffen te verbeteren
- Londen, Parijs, Seoul lanceert naam en schande vervuilende auto-index
- 3D digitaal stadsmodel analyseert effecten van het blokkeren van zonlicht
- Online haatzaaien kan worden ingeperkt als een computervirus, onderzoekers zeggen:
- Spray-on elektrische regenbogen:veiligere elektrochrome inkten maken
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Swedish | German | Dutch | Danish | Norway | Portuguese |

-
Wetenschap © https://nl.scienceaq.com
