Wetenschap
Nieuwe realtime lokalisatie- en kaarttools voor robotica, VR, en AR
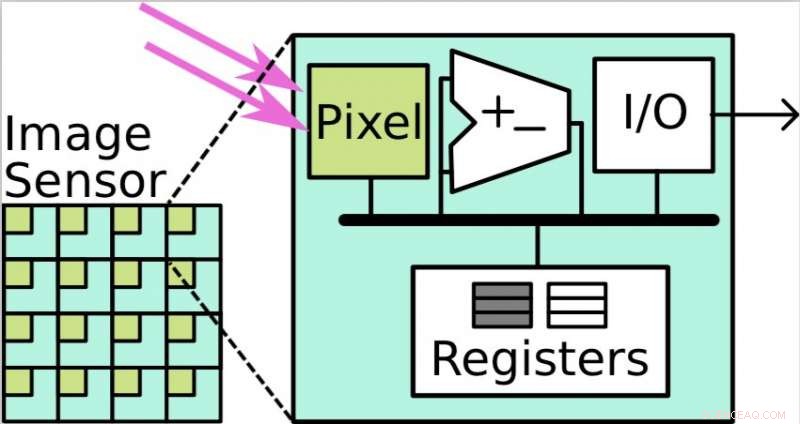
Focal-plane Sensor-Processor Arrays (FPSP's) zijn parallelle verwerkingssystemen, waarbij elke pixel een verwerkingselement heeft. Krediet:Saeedi et al.
Een grote groep onderzoekers van Imperial College London, de Universiteit van Edinburgh, de Universiteit van Manchester, en Stanford University hebben onlangs samengewerkt aan een project waarin de toepassing van realtime lokalisatie- en kaarttools voor robotica wordt onderzocht, autonome voertuigen, virtual reality (VR) en augmented reality (AR). hun papier, gepubliceerd op arXiv en Procedures van de IEEE , schetst de ontwikkeling van methoden om algoritmen voor simultane lokalisatie en mapping (SLAM) te evalueren, evenals een aantal andere interessante tools.
"Het doel van ons werk was om deskundige onderzoekers van computervisie, hardware- en compilergemeenschappen samen om toekomstige systemen voor robotica te bouwen, VR/AR, en het internet der dingen (IoT), " vertelden de onderzoekers Tech Xplore in een e-mail. "We wilden robuuste computervisiesystemen bouwen die de wereld kunnen waarnemen met een zeer laag stroombudget, maar met de gewenste nauwkeurigheid; we zijn geïnteresseerd in de perceptie per Joule-metriek."
De onderzoekers die bij het project betrokken waren, combineerden hun vaardigheden en expertise om algoritmen samen te stellen, architecturen, gereedschap, en software die nodig is om SLAM te leveren. Hun bevindingen kunnen degenen die SLAM op verschillende gebieden toepassen, helpen bij het selecteren en configureren van algoritmen en hardware die optimale prestatieniveaus kunnen bereiken, nauwkeurigheid, en energieverbruik.
"Een belangrijk punt in het project is het idee van interdisciplinair onderzoek:het samenbrengen van experts uit verschillende vakgebieden kan bevindingen mogelijk maken die anders niet mogelijk zouden zijn, ', aldus de onderzoekers.
SLAM-algoritmen zijn methoden die een kaart van een onbekende omgeving kunnen construeren of bijwerken, terwijl de locatie van een bepaalde agent daarin wordt bijgehouden. Deze technologie kan nuttige toepassingen hebben op een aantal gebieden, bijvoorbeeld bij de ontwikkeling van autonome voertuigen, robotica, VR, en AR.
In hun studie hebben de onderzoekers ontwikkelden en evalueerden verschillende tools, inclusief compiler- en runtime-softwaresystemen, evenals hardware-architecturen en computervisie-algoritmen voor SLAM. Bijvoorbeeld, ze ontwikkelden benchmarkingtools waarmee ze een juiste dataset konden selecteren en deze konden gebruiken om SLAM-algoritmen te evalueren.
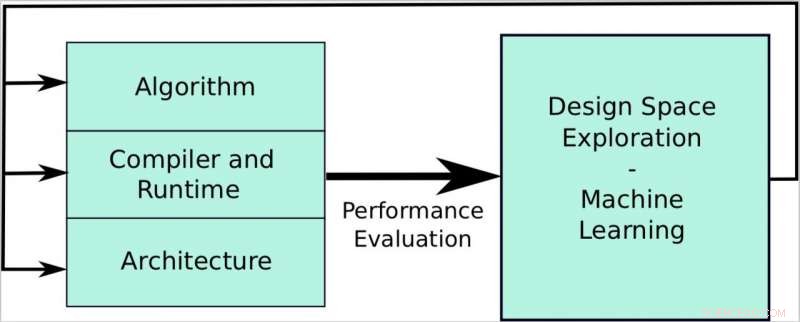
Het doel van het artikel is om een pijplijn te creëren die computervisie-eisen in lijn brengt met hardwaremogelijkheden. De focus van de paper ligt op drie lagen:algoritmen, compiler en runtime, en architectuur. Het doel is om een systeem te ontwikkelen waarmee we vermogen en energie-efficiëntie kunnen bereiken, snelheid en runtime verbetering, en nauwkeurigheid/robuustheid op elke laag en ook holistisch door middel van verkenning van de ontwerpruimte en technieken voor machine learning. Krediet:Saeedi et al.
Bijvoorbeeld, ze gebruikten een applicatie genaamd SLAMBench om het KinectFusion-algoritme op verschillende hardwareplatforms te evalueren en SLAMBench2 om verschillende SLAM-algoritmen te vergelijken. De onderzoekers breidden ook het KinectFusion-algoritme uit, zodat het kan worden gebruikt in robotische padplanning en navigatie-algoritmen; het in kaart brengen van zowel bezette als vrije ruimte in de omgeving.
"Dit project was heel breed, dus, bevindingen waren vrij talrijk, " zeiden de onderzoekers. "Bijvoorbeeld, we hebben praktische toepassingen laten zien waarbij benaderend rekenen een sterke rol kan spelen bij het bereiken van perceptie per joule, bijvoorbeeld de SLAMBench-applicatie die is ontwikkeld voor smartphones. Approximate computing is het idee om een berekeningstaak te voltooien met een gegeven acceptabele fout, en zo een benaderende oplossing te produceren."
Het project onderzocht het gebruik van nieuwe detectietechnologieën, zoals focal-plane sensor-processor arrays, waarvan werd vastgesteld dat ze een laag stroomverbruik en hoge framesnelheden hadden. In aanvulling, het onderzocht de toepassing van statische, dynamisch, en hybride programmaplanningsbenaderingen op multicore-systemen, vooral voor het KinectFusion-algoritme.
"Ons onderzoek heeft al impact op veel gebieden zoals robotica, VR/AR, en IoT, waar machines altijd aan staan en in staat zijn om met redelijke nauwkeurigheid te communiceren en hun taken uit te voeren, zonder onderbrekingen, bij een zeer laag stroomverbruik, ', aldus de onderzoekers.
Dit uitgebreide project heeft geleid tot een aantal belangrijke bevindingen, en op de ontwikkeling van nieuwe tools die de implementatie van SLAM in robotica grotendeels zouden kunnen vergemakkelijken, VR, AR, en autonome voertuigen.
De studie leverde ook een aantal bijdragen op het gebied van hardware-ontwerp, bijvoorbeeld, het ontwikkelen van profileringstools om prestatieknelpunten in zowel native als beheerde applicaties te lokaliseren en te evalueren. De onderzoekers presenteerden een volledige workflow voor het maken van hardware voor computer vision-toepassingen, die kunnen worden toegepast op toekomstige platforms.
"We zullen onze bevindingen nu gebruiken om een geïntegreerd systeem voor robotica en VR/AR te bouwen, " zeiden de onderzoekers. "Bijvoorbeeld, Dr. Luigi Nardi van Stanford University zet zijn onderzoek voort door soortgelijke concepten toe te passen op Deep Neural Networks (DNN), d.w.z. het optimaliseren van hardware en software om DNN efficiënt uit te voeren, terwijl Dr. Sajad Saeedi van het Imperial College London kijkt naar alternatieve analoge technologieën zoals focal-plane sensor-processor arrays (FPSP's) waarmee DNN met zeer hoge framesnelheden kan worden uitgevoerd, orde van 1000s FPS, voor always-on devices en autonome auto's."
© 2018 Tech Xplore
 Hoe Animal Tracks van een Fox
Hoe Animal Tracks van een Fox- Nieuw model voorspelt nauwkeurig hoe kusten worden beïnvloed door stormen en zeespiegelstijging
- Veranderende gemeenschappen kunnen het succes van de evacuatierichtlijnen van IJsland beïnvloeden
- Feiten over Aspen Trees
- Hogere planten verhuizen naar het noordpoolgebied vanwege klimaatverandering
Hoofdlijnen
- Stresstest:uit nieuwe studie blijkt dat zeehonden gestrest zijn door haaien
- Onderzoek verduidelijkt de functie van de nucleaire hormoonreceptor in planten
- Wetenschappers vinden antarctische microben die alleen van lucht leven
- EU stemt ermee in om in 2018 meer vis op een duurzame manier te vangen
- Gelabelde delen van een lintworm
- De toekomst zaaien? Ark conserven zeldzaam, bedreigde planten
- Wat zou er gebeuren als de cel geen DNA had?
- Zwarte neushoorn keert terug naar Tsjaad na deal met Zuid-Afrika
- Eiwit beëindigt opzettelijk de eigen synthese door de synthesemachinerie te destabiliseren - het ribosoom
- Opladen in de richting van interoperabiliteit van elektrische bussen en opladers

- Computermodel wil filmscripts omzetten in animaties

- Deepfakes vormen een raadsel voor Facebook, Zuckerberg zegt:

- EmoSense:een door AI aangedreven en draadloos emotiedetectiesysteem
- Australische hoofdwetenschapper:we moeten onze wereld transformeren in een duurzame elektrische planeet


 Nanotechnologie gebruikt virusmantels om kankercellen voor de gek te houden
Nanotechnologie gebruikt virusmantels om kankercellen voor de gek te houden- Kan waterstof de brandstof van de toekomst zijn?
- How Do Alligators Mate?
- Nieuw model voor onderzoeksactiviteiten rond quasars, zwarte gaten
- Geluid over silicium:de computergolf van de toekomst
- Migranten die zich aanpassen aan de Australische cultuur zeggen dat ze gelukkiger zijn dan degenen die dat niet doen
- New York mikt op torenhoog energieverbruik wolkenkrabbers
- Hogere temperaturen kunnen koraalriffen helpen beschermen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | French |

-
Wetenschap © https://nl.scienceaq.com
