Wetenschap
Als militaire robot valt, het kan zichzelf oprichten
Dr. Chad Kessens, een roboticus bij het US Army Research Laboratory in Aberdeen Proving Ground, MD, komt met innovatieve ideeën voor toekomstige militaire robots. Krediet:het onderzoekslaboratorium van het leger
Wetenschappers van het U.S. Army Research Laboratory en het Johns Hopkins University Applied Physics Laboratory hebben software ontwikkeld om ervoor te zorgen dat als een robot valt, het kan zichzelf weer oprichten, wat betekent dat toekomstige militaire robots minder afhankelijk zullen zijn van hun Soldier-handlers.
Gebaseerd op feedback van soldaten op een legertraining, ARL-onderzoeker Dr. Chad Kessens begon software te ontwikkelen om te analyseren of een bepaalde robot zichzelf "weer op de been" kon krijgen vanuit een omgekeerde oriëntatie.
"Een soldaat vertelde me dat hij zijn robot zo waardeerde, hij stapte uit zijn voertuig om de robot te redden toen hij hem niet terug kon draaien, "Zei Kessens. "Dat is een verhaal dat ik nooit meer wil horen."
Onderzoekers van Navy PMS-408 (Expeditionary Missions) en zijn technische arm, de Indiase Head Explosive Opruimingstechnologie Division, mee eens. Ze werkten samen met JHU/APL en de hoofdaannemer, Northrop Grumman Remotec, om het geavanceerde robotsysteem voor explosievenopruiming te ontwikkelen, of AEODRS, een nieuwe familie EOD-robotsystemen met een modulaire open systeemarchitectuur. Een lichtgewicht rugzakbaar platform, dat is increment een van het programma, zal naar verwachting later dit jaar in productie gaan. Een kritische eis van het programma is dat de robots in staat moeten zijn zichzelf op te richten.
"Deze robots zijn er om soldaten buiten gevaar te houden, " zei Reed Young, Programmamanager Robotica en Autonomie bij JHU/APL. "Zelfredzaamheid is een cruciaal vermogen dat dat doel alleen maar zal bevorderen."
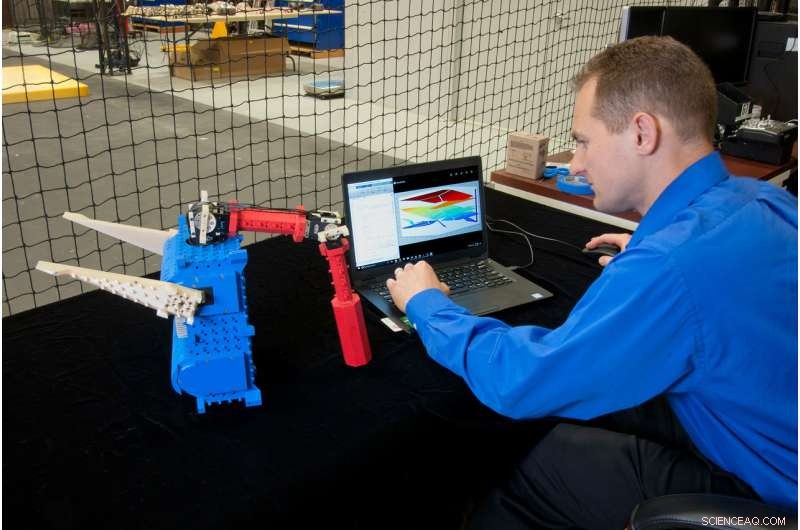
Om het vermogen van het AEODRS-systeem om zichzelf te corrigeren te evalueren, JHU/APL werkte samen met ARL om de door Kessens ontwikkelde software te benutten. Het team kon zijn vermogen uitbreiden naar robots met een groter aantal gewrichten (of vrijheidsgraden) dankzij de expertise van JHU/APL-onderzoeker Galen Mullins op het gebied van adaptieve bemonsteringstechnieken.
"De analyse waaraan ik heb gewerkt, kijkt naar alle mogelijke geometrieën en oriëntaties waarin de robot zich zou kunnen bevinden, " Kessens zei. "Het probleem is dat elk extra gewricht een dimensie toevoegt aan de zoekruimte - dus het is belangrijk om op de juiste plaatsen te zoeken naar stabiele toestanden en overgangen. Anders, het zoeken kan te lang duren."

Onderzoekers verkennen nieuwe technieken met behulp van het Advanced Explosive Ordnance Disposal Robotic System Increment 1 Platform. Krediet:het onderzoekslaboratorium van het leger
Kessens zei dat het werk van Mullins ervoor zorgde dat de analyse efficiënt werkte voor het analyseren van systemen met een hogere mate van vrijheid. Terwijl het werk van Kessens bepaalt waar en hoe gezocht moet worden, Mullins zoekt uit waar hij moet zoeken."
"Deze analyse werd mogelijk gemaakt door onze nieuw ontwikkelde tool voor het plannen van tegenstanders van het assortiment, of RAPT, een softwareraamwerk voor het testen van autonome en robotsystemen, "Zei Mullins. "We hebben oorspronkelijk de software ontwikkeld voor onderwatervoertuigen, maar toen Chad zijn benadering van het zelfoprichtende probleem uitlegde, Ik zag meteen hoe deze technologieën konden samenwerken."
Hij zei dat de sleutel tot deze software een adaptief bemonsteringsalgoritme is dat naar overgangen zoekt.
"Voor dit werk we waren op zoek naar toestanden waar de robot kon overgaan van een stabiele configuratie naar een onstabiele, waardoor de robot omvalt, " legde Mullins uit. "Mijn technieken waren in staat om effectief te voorspellen waar die overgangen zouden kunnen zijn, zodat we de ruimte efficiënt konden doorzoeken."
uiteindelijk, het team was in staat om de acht vrijheidsgraden van het AEODRS-systeem te evalueren en stelde vast dat het zich op een vlakke ondergrond kan bevinden, ongeacht in welke begintoestand het zich bevindt. De analyse genereert ook bewegingsplannen die laten zien hoe de robot zichzelf kan heroriënteren. De bevindingen van het team zijn te vinden in "Evaluating Robot Self-Righting Capabilities using Adaptive Sampling, " gepubliceerd in IEEE's Robotica en automatiseringsbrieven in augustus.
Naast de evaluatie van een specifieke robot, Kessens beschouwt het analysekader als belangrijk voor het vermogen van het leger om robots van verschillende leveranciers te vergelijken en de beste te selecteren voor aankoop.
"Het leger en de marine willen robots die zichzelf kunnen corrigeren, maar we zijn nog steeds bezig om te begrijpen en te evalueren wat dat betekent, "Zei Kessens. "Zelfrecht onder welke voorwaarden? We hebben een metrische analyse ontwikkeld voor het evalueren van het vermogen van een robot om zichzelf recht te zetten op hellende vlakke grond, en we zouden het zelfs kunnen gebruiken als een hulpmiddel om het robotontwerp te verbeteren. Onze volgende stap is om te bepalen waartoe een robot in staat is op oneffen terrein."
 Nieuwe aanpak creëert een uitzonderlijke katalysator met één atoom voor watersplitsing
Nieuwe aanpak creëert een uitzonderlijke katalysator met één atoom voor watersplitsing- Strontium-iridiumoxide gebruikt voor maatwerk als elektronisch materiaal
- Onderzoekers passen ionenzachte landingstechniek toe voor vooruitgang in materiaalsynthese
- Het effect van waterstofionen op de mens
- Van kristallen tot glazen:een nieuwe uniforme theorie voor warmtetransport
- Onderzoekers stappen in de richting van inzicht in hoe giftige PFAS-chemicaliën zich verspreiden vanaf releaselocaties
- Lessen over klimaatverandering uit Afrika:kennis is de sleutel
- Op weg naar een circulaire economie:het probleem van kunststofrecycling aanpakken
- Hindcasting-studie onderzoekt de extreme overstroming van Colorado in 2013
- Obama zet stappen om Trumps handen vast te binden aan Arctic, Atlantische boringen
Hoofdlijnen
- Nieuwe strategie zou bestaande medicijnen in staat kunnen stellen bacteriën te doden die chronische infecties veroorzaken
- Arbusculaire mycorrhiza-schimmelgemeenschappen blootgesteld met nieuwe benadering van DNA-sequencing
- Materialen die nodig zijn om een diercelmodel te maken
- Zowel chimpansees als kinderen bleken bereid te betalen om slechte spelers gestraft te zien
- Hoe een 3D-model voor celbiologieprojecten te bouwen Mitochondria & Chloroplast
- Verschillen tussen lichaamscellen en neuronen
- Wat zijn de 10 Major Body Systems?
- Hoe leeuwenbekken hun kleur behouden:bewegwijzeringstruc onthult evolutionair mechanisme
- Een geslacht van Europese papierwespen voor het eerst herzien met behulp van integratieve taxonomie
- SoftBank mobiele unit in record IPO maar marktdebuut flopt

- Hoe groenere netwerken verlicht kunnen blijven
- Nieuwe technologieën in de oceaanenergiesector

- Hersenen koppelen aan computers:hoe nieuwe implantaten ons helpen dit doel te bereiken

- Onder druk, bang om een badkamerpauze te nemen? In de snelle magazijnwereld van Amazon


 Astronomen detecteren flikkering van de ster EF Aquilae
Astronomen detecteren flikkering van de ster EF Aquilae- Amyloïde vorming op het internationale ruimtestation
- Onderzoekers willen de digitale geletterdheid vergroten van bevolkingsgroepen die kwetsbaar zijn voor oplichting
- Een deltapercentage berekenen
- Het doorbreken van de Wiedemann-Franz-wet
- Britse telecomgroep BT zegt CEO af te treden
- Berekening van BTU-uitvoer van Watts
- Theaterabonnementsservice MoviePass scherpt plannen aan
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | Italian |

-
Wetenschap © https://nl.scienceaq.com
