Wetenschap
Zelfrijdende voertuigen op microschaal
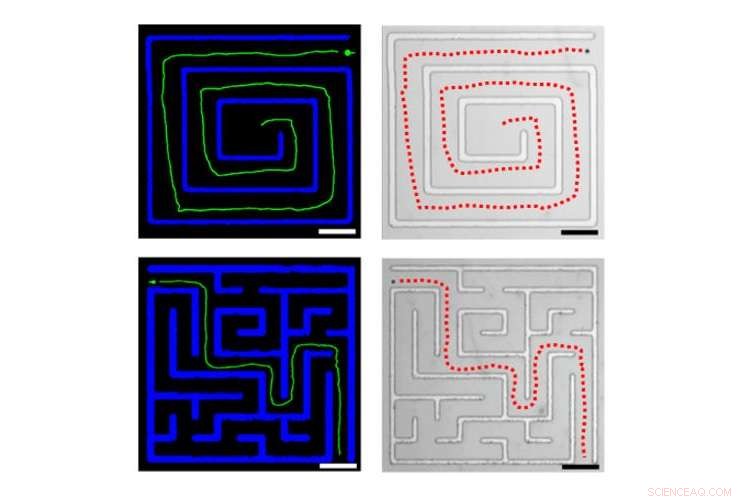
Trajecten van een microvoertuig door doolhoven. Het pad wordt gepland door een kunstmatige intelligentiesysteem en het microvoertuig wordt geleid door magnetische velden. Krediet:Li et al. ©2017 American Chemical Society
(Phys.org) — In een nieuwe studie, wetenschappers hebben de microschaalversie van zelfrijdende voertuigen ontwikkeld:een bolvormige micromotor van 5 m die zich autonoom een weg baant door microverkeer langs een microdoolhof om zijn eindbestemming te bereiken. De onderzoekers verwachten dat deze "slimme microvoertuigen" potentiële toepassingen hebben in biomedische taken, zoals het afleveren van medicijnen aan tumorcellen terwijl gezonde cellen worden vermeden.
De wetenschappers, geleid door Longqiu Li aan het Harbin Institute of Technology in China, en Joseph Wang aan de University of California San Diego in de VS, hebben een artikel gepubliceerd over de slimme microvoertuigen in een recent nummer van ACS Nano .
"We hebben kunstmatige intelligentie ingebed in een micro/nanorobot, " vertelde Li Phys.org . "We introduceren een slim microvoertuig voor nauwkeurige autonome navigatie in gecompliceerde en dynamisch veranderende omgevingen door middel van optimale padplanning. Net als hun tegenhangers voor grote voertuigen, de autonome navigatie van microvoertuigen brengt botsingsvrij verkeer in dynamische omgevingen met zich mee."
Tot nu, micro- en nanomachines zijn beperkt tot navigatie die een gesloten regelsysteem gebruikt, waarin de machines alleen langs een vooraf gedefinieerd pad kunnen bewegen. De nieuwe studie markeert de eerste demonstratie van micromachines die autonoom kunnen navigeren door complexe, dynamisch veranderende omgevingen, zoals die met andere bewegende micromachines.
Het autonome navigatieproces bestaat uit drie hoofdstappen. Een CCD-camera die aan een microscoop is bevestigd, maakt foto's en stuurt ze naar een feature-extractieprocessor, die obstakels identificeert en een kaart van de omgeving construeert. De kaart wordt vervolgens als input naar een Artificial Intelligence (AI) planner gestuurd, die een padzoekalgoritme en fuzzy logic-benadering gebruikt om het kortste botsingsvrije pad tussen meerdere mogelijke paden naar de bestemming te bepalen. De AI-planner stuurt deze reisroutes vervolgens naar een magneetveldgenerator, die een magnetisch veld zodanig oriënteert dat het microvoertuig langs het botsingsvrije pad wordt gestuurd.
De AI-planner, die de kern vormt van het slimme navigatiesysteem, kan ook detecteren wanneer het microvoertuig van zijn geplande pad afdrijft, die kunnen optreden door de aanwezigheid van ruis. In deze gevallen, de AI-planner kan tegelijkertijd de fout meten en het microvoertuig terug op het pad begeleiden.
Een van de belangrijkste toepassingen van dit soort slimme microvoertuigen is mogelijk op biomedisch gebied voor taken zoals ziektediagnostiek, medicijnafgifte, en precisiechirurgie. Laten zien, de onderzoekers toonden aan dat het microvoertuig de camera kan gebruiken om kankercellen te detecteren en te onderscheiden, rode bloedcellen, en gemengde cellen, door verschillen in grootte en vorm te herkennen. De AI-planner beschouwt dan de kankercellen als doelwit en de andere cellen als obstakels, en plant dienovereenkomstig een pad.
"We willen de micro/nanorobotische systemen toepassen op het gebied van biomedische operaties en manipulatie op nanoschaal, ' zei Li.
In de toekomst, de wetenschappers zijn van plan om meer geavanceerde autonome microvoertuigen te ontwikkelen, met functies zoals autonoom remmen, "Cruise control, rijstrook houden, en het vermogen om met de omgeving om te gaan.
© 2017 Fys.org
 Nieuw model suggereert verloren continenten voor de vroege aarde
Nieuw model suggereert verloren continenten voor de vroege aarde- Sri Lankaanse functionarissen zetten zich schrap voor olielek van zinkend schip
- NASA ziet krachtige tropische cycloon tussen Vanuatu en Nieuw-Caledonië
- Zwarte truffel uit de Perigord voor het eerst gekweekt in het VK
- Wat zijn de trofische niveaus in ons ecosysteem?
Hoofdlijnen
- Kevers felle kleuren gebruikt voor camouflage in plaats van roofdieren te waarschuwen
- Hebben mensen en bananen echt 50 procent van hetzelfde DNA?
- Wetenschappers tonen moleculaire basis voor mieren die als lijfwachten voor planten fungeren
- Kunnen tweelingen elkaar voelen?
- Groene Brexit laten werken voor landbouw en milieu
- Gedurende welk deel van de interfase worden de centromeren gerepliceerd?
- Vier klassen van macromoleculen belangrijk voor levende dingen
- Mannelijke dolfijnen bieden geschenken aan om vrouwtjes aan te trekken
- Door geplande experimenten online te volgen, kunnen manieren worden gevonden om dierproeven te verbeteren




 Tweedimensionale heterostructuren samengesteld uit lagen met enigszins verschillende roostervectoren
Tweedimensionale heterostructuren samengesteld uit lagen met enigszins verschillende roostervectoren- Machine luistert naar aardbevingen:algoritmen halen verborgen signalen uit die de productie van geothermische energie kunnen stimuleren
- Satellieten die de regenval volgen van de tropische depressie Gordon
- 7 soorten elektromagnetische golven
- Nieuwe studie toont belofte in het gebruik van RNA-nanotechnologie om kanker en virale infecties te behandelen
- Bereken Arc Area
- Stekelige ferrofluid stuwraketten kunnen satellieten verplaatsen
- Hoe je je eigen onderzeeër kunt bouwen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
