Wetenschap
Wandelen met koffie is een weinig begrepen natuurkundig staaltje
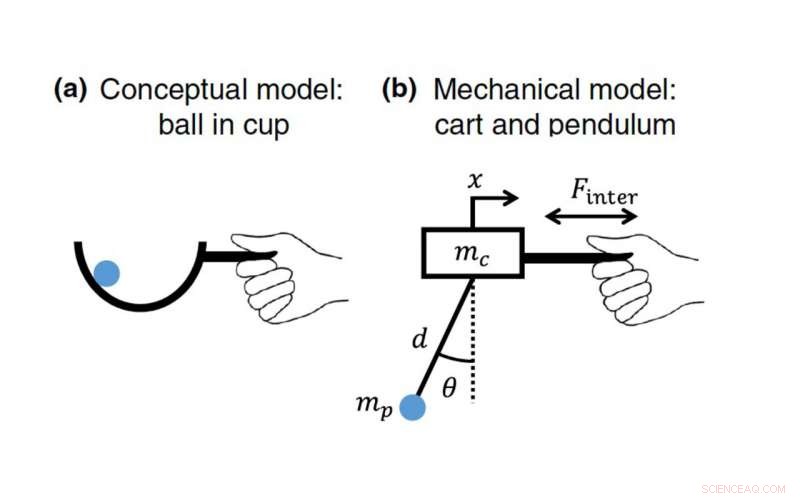
Een schematische illustratie van het cart-pendulum-systeem om de hantering van een complex object door de mens te simuleren, zoals een kop hete koffie:(a) een conceptueel model van een bal die in een ronde kop rolt en (b) een niet-lineair mechanisch model van een slinger bevestigd aan een rijdende kar, die wiskundig wordt beschreven door een reeks differentiaalvergelijkingen. Krediet:Brent Wallace, Ying-Cheng Lai, Staatsuniversiteit van Arizona
Wandelen met koffie is iets wat de meesten van ons elke dag doen zonder rekening te houden met de evenwichtsoefening die het vereist. In feite, er is veel natuurkunde die voorkomt dat de koffie overloopt.
De koffie, een thermisch geroerde vloeistof in een kopje, heeft interne vrijheidsgraden die interageren met de beker die, beurtelings, interageert met de menselijke drager.
"Terwijl mensen een natuurlijke, of begaafd, vermogen om te communiceren met complexe objecten, ons begrip van die interacties, vooral op kwantitatief niveau, is bijna nul, " zei ASU-professor Ying-Cheng Lai, een hoogleraar elektrotechniek aan de Arizona State University. "We hebben geen bewuste mogelijkheid om de invloeden van externe factoren te analyseren, zoals lawaai of klimaat, op onze interacties."
Nog, het begrijpen van deze externe factoren is een fundamentele kwestie in toegepaste gebieden zoals zachte robotica.
"Bijvoorbeeld, bij het ontwerpen van slimme protheses, het wordt steeds belangrijker om natuurlijke vormen van flexibiliteit in te bouwen die de natuurlijke beweging van menselijke ledematen nabootsen, " zei Brent Wallace, een voormalige student van Lai's en nu een doctoraatsstudent aan de Ira A. Fulton Schools of Engineering van ASU. "Dergelijke verbeteringen zorgen ervoor dat de prothese comfortabeler en natuurlijker aanvoelt voor de gebruiker."
Volgens Lay, het is denkbaar dat, in de niet al te verre toekomst, robots zullen worden ingezet in verschillende toepassingen van complexe objecthandling of -controle die het soort coördinatie en bewegingscontrole vereisen dat mensen redelijk goed doen.
Als een robot is ontworpen om met een relatief korte paslengte te lopen, dan zijn relatief grote variaties in de loopfrequentie toegestaan. Echter, als een grotere stap gewenst is, dan moet de loopfrequentie zorgvuldig worden gekozen.
Een nieuw artikel gepubliceerd in Fysieke beoordeling toegepast , "Synchrone overgang in complexe objectcontrole, " is ontstaan bij Wallace als onderdeel van zijn senior ontwerpproject in elektrotechniek, onder toezicht van Lai. Wallace heeft een NSF Graduate Fellowship ontvangen en is nu een doctoraatsstudent in ASU's School of Electrical, Computer- en energietechniek.
Het onderzoek van het ASU-team breidt uit op een baanbrekende, virtuele experimentele studie die onlangs is uitgevoerd door onderzoekers van de Northeastern University, het gebruik van het paradigma van het vasthouden van een koffiekop en het toevoegen van een rollende bal, om te onderzoeken hoe mensen een complex object manipuleren. De deelnemers draaiden de beker opzettelijk op een ritmische manier met de mogelijkheid om kracht en frequentie te variëren om ervoor te zorgen dat de bal in bedwang bleef.
De Northeastern-studie toonde aan dat de deelnemers de neiging hebben om ofwel een laagfrequente of een hoogfrequente strategie te selecteren - ritmische beweging van de beker - om een complex object te hanteren.
Een opmerkelijke bevinding was dat wanneer een laagfrequente strategie werd gebruikt, de oscillaties vertonen in-fase synchronisatie, maar antifase-synchronisatie treedt op wanneer een hoogfrequente strategie werd gebruikt.
"Omdat zowel de lage als de hoge frequenties effectief zijn, het is denkbaar dat sommige deelnemers aan het virtuele experiment van strategie wisselden, "zei Wallace. "Dit roept vragen op.
"Hoe vindt een overgang plaats van in-fase synchronisatie geassocieerd met een laagfrequente strategie naar antifase-synchronisatie geassocieerd met een hoogfrequente strategie, of vice versa, " vroeg Wallace. "In de parameterruimte, is de grens tussen de in-fase en anti-fase synchronisatieregimes scherp, geleidelijk, of verfijnd?"
Het onderzoek van het ASU-team, ingegeven door Wallace's nieuwsgierigheid, bestudeerde de overgang tussen de in-fase en anti-fase synchronisatie met behulp van een niet-lineair dynamisch model van een slinger bevestigd aan een bewegende kar onderworpen aan externe periodieke forcering.
De onderzoekers vonden dat, in het zwak dwingende regime, omdat de externe aandrijffrequentie wordt gevarieerd, de overgang is abrupt en vindt plaats op de frequentie van resonantie, die volledig kan worden begrepen met behulp van de regeltheorie van lineaire systemen.
Buiten dit regime, een overgangsgebied ontstaat tussen de in-fase en anti-fase synchronisatie, waar de bewegingen van de kar en de slinger niet synchroon lopen. Er werd ook gevonden dat er bistabiliteit is in en nabij het overgangsgebied aan de laagfrequente kant.
Algemeen, de resultaten geven aan dat mensen in staat zijn om abrupt en efficiënt over te schakelen van de ene synchrone attractor naar de andere, een mechanisme dat kan worden benut voor het ontwerpen van slimme robots om adaptief om te gaan met complexe objecten in een veranderende omgeving.
"Het is mogelijk dat mensen in staat zijn om zowel in-fase als antifase-strategieën vakkundig te gebruiken en soepel van de ene strategie naar de andere over te schakelen, misschien zelfs zonder het te beseffen. De bevindingen uit dit onderzoek kunnen worden gebruikt om deze menselijke vaardigheden te implementeren in zachte robots met toepassingen op andere gebieden, zoals revalidatie en brein-machine-interface, ' zei Lay.
Aanvullend, Taken die zo triviaal zijn als het trekken van draden in een carrosserie op een lopende band - die mensen met gemak uitvoeren - ontwijken nog steeds de meest geavanceerde machines.
"Een systematisch kwantitatief begrip van hoe mensen dynamisch omgaan met hun omgeving zal voor altijd veranderen hoe we onze wereld ontwerpen, en kan een revolutie teweegbrengen in het ontwerp van slimme protheses en een nieuw tijdperk van productie en automatisering inluiden, " zei Wallace. "Door het dynamisch gunstige gedrag na te bootsen dat door mensen wordt aangenomen bij het omgaan met complexe objecten, we zullen in staat zijn om processen te automatiseren die voorheen voor onmogelijk werden gehouden."
 Een nieuwe brandstofcel-elektrolyt
Een nieuwe brandstofcel-elektrolyt- Chemische detectiechip ruikt cocaïne binnen enkele minuten
- Baanbrekende zuivering van fossiel stuifmeel met behulp van een nieuwe on-chip sorter voor grote deeltjes
- Licht schijnen op de scheiding van zeldzame aardmetalen
- Video:Hoe chemie verwijdering van koolstofdioxide mogelijk maakt
Hoofdlijnen
- Hoe lucide dromen werkt
- Verschillen tussen Protista en Monera
- De Stoned Ape-hypothese:hebben paddo's de menselijke evolutie beïnvloed?
- Onderzoek onthult hoe verontreinigende stoffen de vroege embryonale ontwikkeling beïnvloeden
- Vreemde ondernemingen:mierenkoninginnen begraven doden om ziekte te voorkomen
- Wondgenezing of regeneratie - de omgeving beslist?
- Niveaus van celorganisatie
- Een eetbare cel maken
- Waarom zijn chromosomen belangrijk voor celdeling?




 Onderzoekers bereiken 's werelds eerste manipulatie van antimaterie door laser
Onderzoekers bereiken 's werelds eerste manipulatie van antimaterie door laser- Hoe Factor-polynomen van graad 3
- Arctische onderzoeksexpeditie wordt waarschijnlijk geconfronteerd met extreme omstandigheden in het snel veranderende Noordpoolgebied
- Vergelijk en vergelijk DNA en RNA
- Amazon wil zijn ecologische voetafdruk verkleinen
- Hoe je geboortedatum van invloed is op hoe goed je het doet op school, en later in het leven
- Bacteriën die zich voeden met Arctische algenbloei kunnen wolken zaaien
- Wetenschappers detecteren een kwantumkristal van elektronen en zien het smelten
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
