Wetenschap
Een proprioceptief mechanisme om vissen als zwemmen in robots mogelijk te maken
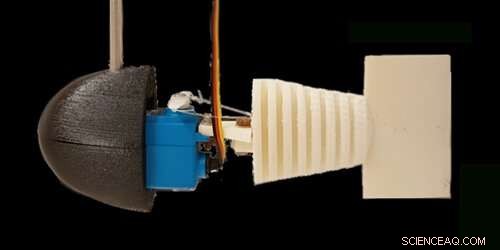
De eenvoudige roboteenheid van de onderzoekers. Het witte materiaal is 3D-geprint met vervormbare polymeren. Een servomotor (blauw) drijft twee kabels aan die voor de vervorming van de robot zorgen. Het donkere deel is 3D geprint in een stevig materiaal. Krediet:Sanchez-Rodriguez et al.
In de laatste paar decennia, robotici hebben een verscheidenheid aan robots ontwikkeld die zijn geïnspireerd door de natuur, mensen en dieren. Om dieren of mensen effectief na te bootsen, echter, deze robots moeten er niet alleen zo uitzien; ze moeten ook op vergelijkbare manieren bewegen.
Onderzoekers van de Université Côte d'Azur-CNRS hebben onlangs een nieuw bio-geïnspireerd mechanisme geïntroduceerd om visachtig zwemmen in robots te bereiken. Dit mechanisme, geïntroduceerd in een paper gepubliceerd in Fysieke beoordelingsbrieven , is gebaseerd op wat bekend staat als proprioceptie, het vermogen van dieren om informatie te verzamelen over de positie van hun lichaam, beweging en versnelling.
"Met mijn collega's M. Gazzola en L. Mahadevan, we hebben een algemene wet ontdekt die de snelheid van macroscopische onderwaterzwemmers voorspelt als functie van de zwemgang, d.w.z., de amplitude en de frequentie van de vin/staartslag, " Mederic Argentinië, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde Phys.org . "Ons werk leverde een rationele verklaring voor deze schaalwet die werkte op zwemmers van een paar centimeter lang tot de grootste dieren, zoals blauwe vinvissen (30m)."
Om hun model te testen, de onderzoekers wilden kinematische gegevens verzamelen van staartgolf, die nog niet is gemeten bij levende dieren. In aanvulling, ze waren nieuwsgierig om te begrijpen welke mechanismen een bepaalde zwemmer in staat stellen om de amplitude en frequentie van de beweging van zijn staart te selecteren. Om dit te behalen, ze bouwden een kleine volgzame robot met een lichaam dat biomimetisch kan vervormen.
"Met dit robotplatform konden we onze schaalwet valideren, maar ook om scenario's te verkennen voor de selectie van de golvingskinematica, " zei Argentinië. "Het leek logisch dat proprioceptie een uitstekende kandidaat zou zijn, omdat het een zintuig is (soms het zesde zintuig genoemd) dat lichaamsvervorming evalueert, zijn versnelling of de gevoelde kracht. In onze recente krant we vroegen ons af of een feedbacklus gecontroleerd door proprioceptie motoriek zou kunnen activeren en ons werk toonde aan dat proprioceptieve sensoren inderdaad een mooi en stabiel zwemmen kunnen veroorzaken."
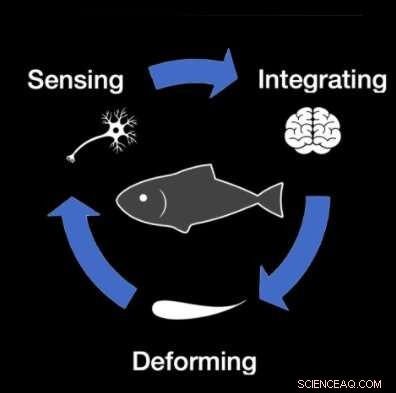
Krediet:Sanchez-Rodriguez et al.
Het belangrijkste voordeel van het door Argentinië en zijn collega's geïntroduceerde proprioceptieve mechanisme is dat het robotzwemmers in staat stelt hun golving aan te passen aan hun omgeving, net als veel vissen. In feite, de meeste vissen hebben zijlijnen die de druk van vloeistof op hun lichaam kunnen meten, waardoor ze proprioceptieve zintuigen kunnen integreren.
"Ons idee was om de feedback van de gevoelde kracht van de robot op de vervorming van de staart te benutten, "Zei Argentinië. "Deze aanpak is dus eenvoudig, robuust en zou de keuze van de zwemgangen kunnen verklaren."
De onderzoekers testten het proprioceptieve mechanisme dat ze ontwikkelden op een echte biomimetische robot, het vergelijken van de prestaties met de prestaties die het behaalde bij gebruik van een generiek model voor robotzwemmen. Hun bevindingen waren veelbelovend, omdat hun mechanisme gunstig afsteekt bij het generieke model en visachtig zwemmen in de robot mogelijk maakt.
"Proprioceptie kan ook de eerste stap zijn om golvende robots te creëren die hun kinematica automatisch afstemmen op de omgeving, " zei Argentinië. "Ons werk toonde aan dat deze eenvoudige koppeling van proprioceptie aan staartbeweging een instabiliteit zou kunnen veroorzaken die de staart ertoe aanzet te golven en de zwemmer duwt."
In de toekomst, het proprioceptieve mechanisme dat door dit team van onderzoekers is bedacht, zou de ontwikkeling mogelijk kunnen maken van aquatische robots die zich effectiever in water kunnen bewegen. In de tussentijd, Argentinië en zijn collega's zullen blijven werken aan hun robot om zijn mogelijkheden te verbeteren.
"We leren de robot momenteel zwemmen met behulp van machine learning-technieken, Argentinië zei. "Onze eerste resultaten geven ons veel vertrouwen dat we golvende robots moeten kunnen bouwen/ontwerpen die met AI zwemmen."
© 2021 Science X Network
 Zweden wordt de komende dagen geconfronteerd met extreem brandgevaar
Zweden wordt de komende dagen geconfronteerd met extreem brandgevaar- Satellietgegevensrecord toont impact van klimaatverandering op branden
- Copernicus-satellieten houden ijsbergen in de gaten voor Vendée Globe
- Barcelona verbiedt oudere, meest vervuilende auto's
- Het regent naalden:drugscrisis creëert bedreiging voor vervuiling
Hoofdlijnen
- Wat kan er gebeuren als Meiose verkeerd gaat?
- Hoe deelbaar door uit te drukken in Excel
- Symbiose en celevolutie:Lynn Margulis en de oorsprong van eukaryoten
- Saharastof:het goede,
- Bootverkeer bedreigt het voortbestaan van de Bocas Del Toro-dolfijnen in Panama
- Een flitsende gele keelzanger? Daar zijn genen voor
- Anti-verouderingsbehandelingen - de wetenschap van het leven langer
- Wat veroorzaakt de dubbele helix om te draaien in een DNA-afbeelding?
- Twin Monkeys voor het eerst gekloond als Dolly the Sheep
- Diamant kan flexibel worden als het tot ultrafijne naalden wordt gemaakt, onderzoekers vinden

- Voel de beat:geïmplanteerde microlasers scannen hart van binnenuit
- Verduidelijking van plasma-oscillatie door hoogenergetische deeltjes

- De eerste demonstratie van vlechten in fotonische topologische nulmodi
- Een nieuw raamwerk kan helpen bij het zoeken naar zware thermische donkere materie

 Astronomen onderzoeken extreme variabiliteit van de actieve galactische kern van Big Dipper
Astronomen onderzoeken extreme variabiliteit van de actieve galactische kern van Big Dipper- Opwarming van de aarde vergroot kans op vorstschade aan bomen
- Niet alle somberheid:wereldleiders prijzen succes op klimaattop
- Ingenieurs bouwen eerste sub-10-nm koolstof nanobuistransistor
- Soorten Pijlstaartrogvissen
- Nieuw licht werpen op laseradditieve fabricage
- Kan de kwantumtheorie verklaren waarom grappen grappig zijn?
- Lijst met onderzeese oceaanplanten
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway | Italian |

-
Wetenschap © https://nl.scienceaq.com
