Wetenschap
OmniTact:een compacte tactiele sensor met hoge resolutie voor robottoepassingen
Een menselijke duim naast OmniTact en een Amerikaanse cent; geeft de grootte van de sensor weer. Krediet:Padmanabha et al.
In recente jaren, onderzoekers over de hele wereld hebben geprobeerd sensoren te ontwikkelen die de tastzin van mensen in robots kunnen nabootsen en hun manipulatievaardigheden kunnen verbeteren. Hoewel sommige van deze sensoren opmerkelijke resultaten behaalden, de meeste bestaande oplossingen hebben kleine gevoelige velden of kunnen alleen afbeeldingen met lage resoluties verzamelen.
Een team van onderzoekers van UC Berkeley heeft onlangs een nieuwe multidirectionele tactiele sensor ontwikkeld, genaamd OmniTact, dat enkele van de beperkingen van eerder ontwikkelde sensoren overwint. OmniTact, gepresenteerd in een paper dat vooraf is gepubliceerd op arXiv en zal worden gepresenteerd op ICRA 2020, fungeert als een kunstmatige vingertop waarmee robots de eigenschappen kunnen voelen van objecten die ze vasthouden of manipuleren.
"Ons laboratorium erkende de behoefte aan een sensor voor algemene robotmanipulatietaken met uitgebreidere mogelijkheden dan de huidige tactiele sensoren, "Freder Ebert, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. 'Bestaande tactiele sensoren zijn ofwel plat, kleine gevoelige velden hebben of alleen signalen met een lage resolutie leveren. Bijvoorbeeld, de GelSight-sensor biedt een hoge resolutie (d.w.z. 400x400 pixel) afbeeldingen, maar is groot en plat, het verstrekken van gevoeligheid aan slechts één kant, terwijl de OptoForce-sensor gebogen is, maar geeft alleen krachtmetingen op een enkel punt."
OmniTact, de sensor ontwikkeld door Ebert en zijn collega's, is een bewerking van GelSight, een tactiele sensor gemaakt door onderzoekers van MIT en UC Berkeley. GelSight kan gedetailleerde 3D-kaarten van het oppervlak van een object genereren en enkele kenmerken ervan detecteren.
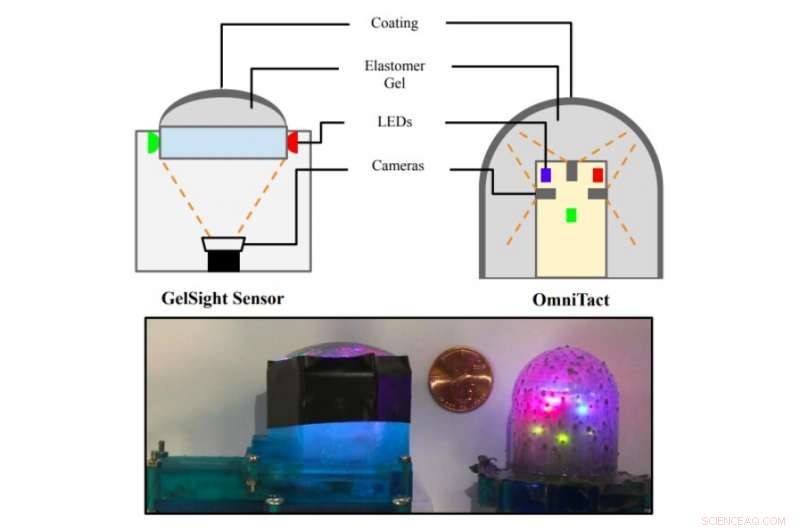
Een illustratie en afbeelding die de basisverschillen tussen de GelSight Sensor en OmniTact uitleggen. Krediet:Padmanabha et al.
In tegenstelling tot GelSight, OmniTact is multidirectioneel, wat betekent dat alle kanten detectiemogelijkheden hebben. In aanvulling, het kan metingen met een hoge resolutie leveren, is zeer compact en heeft een gebogen vorm. Wanneer geïntegreerd in een grijper of robothand, de sensor fungeert als een gevoelige kunstmatige 'vinger, " waardoor de robot een breed scala aan objecten kan manipuleren en waarnemen, variërend in vorm en grootte.
OmniTact is gebouwd door meerdere microcamera's in te bedden in een kunstmatige huid van siliconengel. De camera's detecteren multidirectionele vervormingen van de op gel gebaseerde huid, het produceren van een rijk signaal dat vervolgens kan worden geanalyseerd door computervisie en beeldverwerkingstechnieken om informatie af te leiden over de objecten die een robot manipuleert.
"Ons team gebruikt op leren gebaseerde benaderingen om gebruik te maken van de feedback met hoge resolutie en handmatige kalibratieprocedures te vermijden, "Achil Padmanabha, een andere onderzoeker die bij het onderzoek betrokken was, vertelde TechXplore. "OmniTact zorgt voor aanraakdetectie aan alle kanten van de sensor, waardoor robots toegang hebben tot tactiele feedback terwijl ze in elke richting contact maken met objecten."
Ebert, Padmanabha en hun collega's evalueerden de prestaties van hun sensor op een redelijk uitdagende taak, waar een robot een elektrische connector in een stopcontact moest steken. Ze testten ook het vermogen om de contacthoek van een vinger af te leiden terwijl deze tegen een bepaald object drukte. In deze eerste evaluaties OmniTact behaalde opmerkelijke resultaten, beter presteren dan zowel een tactiele sensor die slechts aan één kant gevoelig is als een andere multidirectionele sensor in de statusschattingstaak.
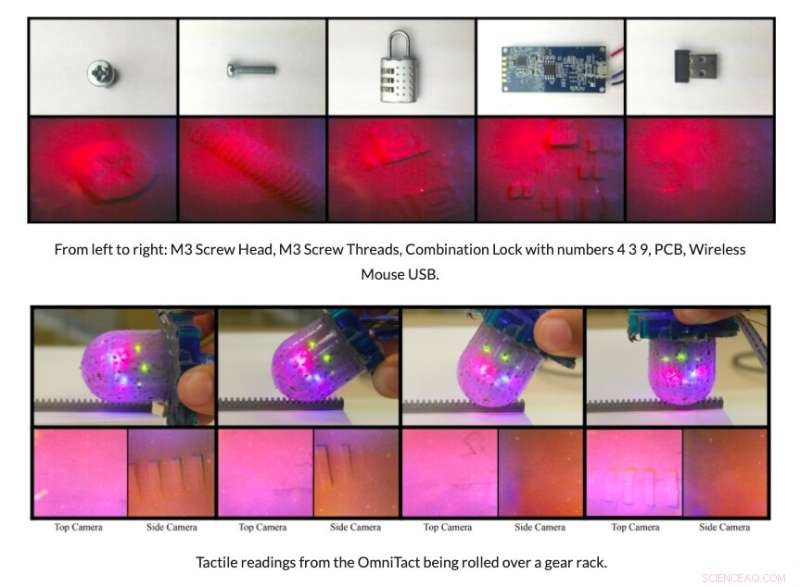
Krediet:Padmanabha et al.
"Door onze experimenten met OmniTact, ontdekten we dat multidirectionele, tactiele detectie met hoge resolutie maakt bepaalde fijnkorrelige manipulatietaken mogelijk, zoals de taak voor het inbrengen van de connector die we hebben gepresenteerd, "Stefan Tian, een andere onderzoeker die bij het onderzoek betrokken was, vertelde TechXplore. "We vermoeden dat multidirectionele tactiele detectie in de toekomst een essentieel element zou kunnen zijn in robotmanipulatie voor algemene doeleinden, naast toepassingen zoals robotische teleoperatie in chirurgie, evenals in zee- en ruimtemissies."
De onderzoekers bouwden hun sensor met behulp van microcamera's die doorgaans worden gebruikt in endoscopen, giet de siliconengel direct op de camera's. Als resultaat, OmniTact is veel compacter dan eerder ontwikkelde GelSight-sensoren en zou dus een breder scala aan mogelijke toepassingen kunnen hebben. In de toekomst, het zou de weg kunnen effenen voor de creatie van nieuwe robots met meer geavanceerde detectiemogelijkheden.
"We zijn van plan OmniTact goedkoper en compacter te maken, waardoor het voor een breder scala aan taken kan worden gebruikt. Ons team is bovendien van plan meer onderzoek naar robotmanipulatie uit te voeren dat toekomstige generaties tactiele sensoren zal informeren, ' zei Padmanabha.
© 2020 Wetenschap X Netwerk
 Magneten scheiden op duurzame wijze mengsels van zeldzame aardmetalen
Magneten scheiden op duurzame wijze mengsels van zeldzame aardmetalen- Wat is het doel van een pipet?
- Moleculaire engineering metaalcoördinatie-interacties voor sterke, moeilijk, snel herstellende hydrogels
- 3 Spooky Science-hacks om te proberen op Halloween
- Een mooie reactie daarop:nieuwe synthetische routes voor diverse aromatische verbindingen
Hoofdlijnen
- Hoe verschilt DNA & RNA?
- Wilde druivengist kan effectiever zijn dan pesticiden bij het voorkomen van druivenschimmels
- De Saguaro Cactus is een iconisch symbool van het Amerikaanse zuidwesten
- Welke conclusies kunnen worden getrokken uit de overeenkomsten van de genetische code tussen levende organismen?
Als je door het park loopt en een straathond door het gras ziet rennen, is het niet zo moeilijk om delen van het erfgoed te identificer
- Menselijke anatomieprojecten
- Soorten redeneren in geometrie
- Het voordeel testen van linkshandig zijn in de sport
- Een model van een plantencel in een plastic zak maken
- Chromosoomorganisatie komt voort uit 1-D-patronen
- Draagbare tricorder scant levenstekens
- S. Korea lanceert 5G-smartphonenetwerken eerder dan gepland

- Een nieuwe tool om een miljard mensen te helpen die risico lopen door gebrek aan toegang tot koeling

- Microsoft meldt nieuwe Windows-kwetsbaarheid

- Hoe data science in en voor Afrika nieuwe wegen kan banen


 Fotodetector op nanoschaal toont belofte om de capaciteit van fotonische circuits te verbeteren
Fotodetector op nanoschaal toont belofte om de capaciteit van fotonische circuits te verbeteren- Wereldwaterdag 2020:ontziltingstechnologieën zorgen voor veilig en duurzaam drinkwater
- Poreuze enkelkristallijne monolieten op centimeterschaal met Lewis-zuurplaatsen met hoge dichtheid om propaandehydrogena te verbeteren
- Achtergrondwarmte op kamertemperatuur omzetten in energie
- Hoe maak je een Bug Zapper
- Praten met de maan:Europa presenteert plan voor maansatellieten
- NASA onderzoekt zware regenval veroorzaakt door de voormalige tyfoon Lan
- Onderzees vulkanisme kan het middeleeuwse jaar van de duisternis verklaren
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
