Wetenschap
Sensorische huid helpt zachte robots om zich te oriënteren

MIT-onderzoekers hebben een "gesensoriseerde" huid gecreëerd, gemaakt met op kirigami geïnspireerde sensoren, dat geeft zachte robots een groter bewustzijn van de beweging en positie van hun lichaam. Krediet:Ryan L. Truby, MIT CSAIL
Voor de eerste keer, MIT-onderzoekers hebben een zachte robotarm in staat gesteld om zijn configuratie in de 3D-ruimte te begrijpen, door alleen gebruik te maken van bewegings- en positiegegevens van zijn eigen "gesensoriseerde" huid.
Zachte robots gemaakt van zeer conforme materialen, vergelijkbaar met die in levende organismen, worden verdedigd als veiliger, en meer aanpasbaar, veerkrachtig, en bio-geïnspireerde alternatieven voor traditionele rigide robots. Maar autonome controle geven aan deze vervormbare robots is een monumentale taak omdat ze op elk moment in een vrijwel oneindig aantal richtingen kunnen bewegen. Dat maakt het moeilijk om plannings- en controlemodellen te trainen die automatisering aansturen.
Traditionele methoden om autonome besturing te bereiken, maken gebruik van grote systemen van meerdere motion-capture camera's die de robots feedback geven over 3D-bewegingen en posities. Maar die zijn onpraktisch voor zachte robots in toepassingen in de echte wereld.
In een artikel dat in het tijdschrift wordt gepubliceerd IEEE Robotica en automatiseringsbrieven , de onderzoekers beschrijven een systeem van zachte sensoren die het lichaam van een robot bedekken om "proprioceptie" te bieden, wat betekent bewustzijn van beweging en positie van zijn lichaam. Die feedback mondt uit in een nieuw diepgaand lerend model dat de ruis doorzoekt en duidelijke signalen opvangt om de 3D-configuratie van de robot te schatten. De onderzoekers valideerden hun systeem op een zachte robotarm die lijkt op een olifantenslurf, die zijn eigen positie kan voorspellen terwijl hij autonoom rondzwaait en uitschuift.
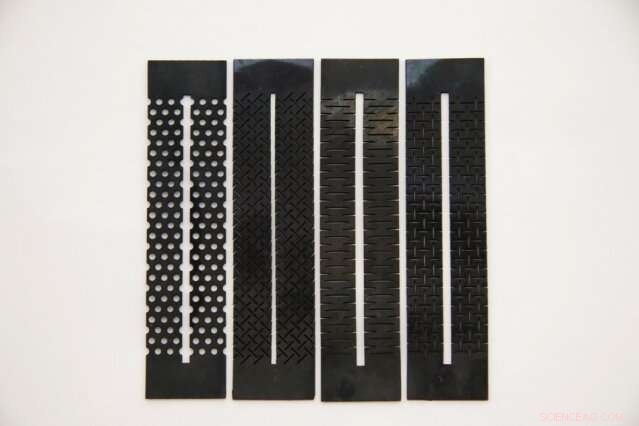
De zachte sensoren van de onderzoekers zijn geleidende siliconenvellen die in kirigami-patronen zijn gesneden. Ze hebben "piëzoresistieve" eigenschappen, wat betekent dat ze in elektrische weerstand veranderen wanneer ze worden belast. Terwijl de sensor vervormt als reactie op het uitrekken en comprimeren van de robotarm, de elektrische weerstand wordt omgezet in een uitgangsspanning die vervolgens wordt gebruikt als een signaal dat correleert met die beweging. Krediet:Ryan L. Truby, MIT CSAIL
De sensoren kunnen worden vervaardigd met gebruiksklare materialen, wat betekent dat elk laboratorium zijn eigen systemen kan ontwikkelen, zegt Ryan Truby, een postdoc in het MIT Computer Science and Artificial Laboratory (CSAIL), die samen met CSAIL-postdoc Cosimo Della Santina co-eerste auteur van het artikel is.
"We sensoriseren zachte robots om feedback te krijgen voor besturing van sensoren, geen zichtsystemen, met behulp van een zeer eenvoudige, snelle methode voor fabricage, "zegt hij. "We willen deze zachte robotstammen gebruiken, bijvoorbeeld, om zich automatisch te oriënteren en te beheersen, dingen oppakken en met de wereld omgaan. Dit is een eerste stap in de richting van dat soort meer geavanceerde geautomatiseerde controle."
Een toekomstig doel is om te helpen bij het maken van kunstmatige ledematen die voorwerpen in de omgeving handiger kunnen hanteren en manipuleren. "Denk aan je eigen lichaam:je kunt je ogen sluiten en de wereld reconstrueren op basis van feedback van je huid, " zegt co-auteur Daniela Rus, directeur van CSAIL en de Andrew en Erna Viterbi hoogleraar elektrotechniek en computerwetenschappen. "We willen diezelfde mogelijkheden ontwerpen voor zachte robots."
Zachte sensoren vormgeven

Krediet:Massachusetts Institute of Technology
Een oud doel in zachte robotica zijn volledig geïntegreerde lichaamssensoren. Traditionele stijve sensoren doen afbreuk aan de natuurlijke meegaandheid van een zachte robotbehuizing, het ontwerp en de fabricage bemoeilijken, en kan verschillende mechanische storingen veroorzaken. Op zachte materialen gebaseerde sensoren zijn een geschikter alternatief, maar vereisen gespecialiseerde materialen en methoden voor hun ontwerp, waardoor ze voor veel robotica-labs moeilijk te fabriceren en te integreren zijn in zachte robots.
Terwijl hij op een dag in zijn CSAIL-lab aan het werk was op zoek naar inspiratie voor sensormaterialen, Truby maakte een interessante connectie. "Ik vond deze vellen geleidende materialen die werden gebruikt voor afscherming tegen elektromagnetische interferentie, die je overal op rollen kunt kopen, " zegt hij. Deze materialen hebben "piëzoresistieve" eigenschappen, wat betekent dat ze in elektrische weerstand veranderen wanneer ze worden belast. Truby realiseerde zich dat ze effectieve zachte sensoren konden maken als ze op bepaalde plekken op de kofferbak werden geplaatst. Als de sensor vervormt als reactie op het uitrekken en comprimeren van de romp, de elektrische weerstand wordt omgezet in een specifieke uitgangsspanning. De spanning wordt dan gebruikt als een signaal dat correleert met die beweging.
Maar het materiaal rekte niet veel uit, die het gebruik ervan voor zachte robotica zou beperken. Geïnspireerd door kirigami - een variatie op origami die het maken van sneden in een materiaal omvat - heeft Truby rechthoekige stroken van geleidende siliconenvellen ontworpen en met laser gesneden in verschillende patronen, zoals rijen kleine gaatjes of kriskras door elkaar lopende plakjes als een gaashekwerk. Dat maakte ze veel flexibeler, rekbaar, "en mooi om naar te kijken, ' zegt Truby.
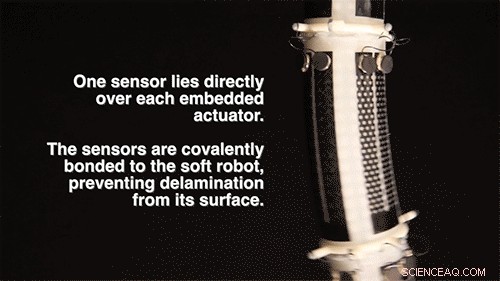
De robotkoffer van de onderzoekers bestaat uit drie segmenten, elk met vier fluïdische actuatoren (12 in totaal) die worden gebruikt om de arm te bewegen. Ze hebben één sensor over elk segment gefuseerd, waarbij elke sensor gegevens van één ingebouwde actuator in de zachte robot afdekt en verzamelt. Ze gebruikten "plasmabinding, " een techniek die een oppervlak van een materiaal activeert om het aan een ander materiaal te binden. Het duurt ongeveer een paar uur om tientallen sensoren te vormen die aan de zachte robots kunnen worden gehecht met behulp van een handheld plasma-bonding-apparaat.

Krediet:Massachusetts Institute of Technology
zoals verondersteld, de sensoren registreerden de algemene beweging van de kofferbak. Maar ze waren echt luidruchtig. "Eigenlijk, het zijn in veel opzichten niet-ideale sensoren, "zegt Truby. "Maar dat is gewoon een normaal feit bij het maken van sensoren van zacht geleidende materialen. Beter presterende en betrouwbaardere sensoren vereisen gespecialiseerde tools die de meeste robotica-labs niet hebben."
Om de configuratie van de zachte robot te schatten met alleen de sensoren, de onderzoekers bouwden een diep neuraal netwerk om het meeste zware werk te doen, door de ruis te doorzoeken om zinvolle feedbacksignalen op te vangen. De onderzoekers ontwikkelden een nieuw model om de vorm van de zachte robot kinematisch te beschrijven, waardoor het aantal variabelen dat nodig is om hun model te verwerken enorm wordt verminderd.
Krediet:Ryan L. Truby, MIT CSAIL
Bij experimenten, de onderzoekers lieten de romp rondzwaaien en zich in willekeurige configuraties over ongeveer anderhalf uur uitstrekken. Ze gebruikten het traditionele bewegingsregistratiesysteem voor grondwaarheidsgegevens. In opleiding, het model analyseerde gegevens van zijn sensoren om een configuratie te voorspellen, en vergeleek zijn voorspellingen met die grondwaarheidsgegevens die tegelijkertijd werden verzameld. Daarbij, het model "leert" om signaalpatronen van zijn sensoren in kaart te brengen in real-world configuraties. Resultaten aangegeven, dat voor bepaalde en stabielere configuraties, de geschatte vorm van de robot kwam overeen met de grondwaarheid.
Volgende, de onderzoekers willen nieuwe sensorontwerpen verkennen voor verbeterde gevoeligheid en nieuwe modellen en diepgaande leermethoden ontwikkelen om de vereiste training voor elke nieuwe zachte robot te verminderen. Ze hopen ook het systeem te verfijnen om de volledige dynamische bewegingen van de robot beter vast te leggen.
Momenteel, het neurale netwerk en de sensorhuid zijn niet gevoelig voor het vastleggen van subtiele bewegingen of dynamische bewegingen. Maar, voor nu, dit is een belangrijke eerste stap voor op leren gebaseerde benaderingen van zachte robotbesturing, Truby zegt:"Net als onze zachte robots, levende systemen hoeven niet helemaal precies te zijn. Mensen zijn geen nauwkeurige machines, in vergelijking met onze starre robotachtige tegenhangers, en we doen het prima."
Dit verhaal is opnieuw gepubliceerd met dank aan MIT News (web.mit.edu/newsoffice/), een populaire site met nieuws over MIT-onderzoek, innovatie en onderwijs.
 NASA vindt zware regenval in tyfoon Bualoi boven Marianas
NASA vindt zware regenval in tyfoon Bualoi boven Marianas- Overstromingen door orkaan beïnvloeden Lumbee River Basin
- Manieren om een storm met luchtdruk voor te voorspellen
- Diversiteit is de sleutel tot duurzaamheid voor de lokale kippenhouderij in Afrika
- Stikstofbindende bomen eten rotsen, cruciale rol spelen in de gezondheid van bossen
Hoofdlijnen
- Hoge nachttemperaturen hebben een negatieve invloed op de productie van koolzaadplanten
- De soorten weefsels waarvan DNA kan worden geëxtraheerd om DNA-vingerafdrukken te maken
- Hoe neemt een slijmvorm beslissingen zonder hersenen?
- Wat zijn de stappen in de meiose die de variabiliteit verhogen?
- Wat maakt bodem, bodem? Onderzoekers vinden verborgen aanwijzingen in DNA
- Het huidige begrip van dierenwelzijn sluit momenteel vissen uit, ook al voelen vissen pijn
- Hoe maak je een modelhart met materialen uit je thuis
- Wat is de elektrische impuls die een axon naar beneden beweegt?
- DNA-ontdekking kan licht werpen op zeldzame kinderziekte
- Ongemakkelijk hellend toilet ontworpen om uitstellende werknemers door te spoelen

- Luchthaven Frankfurt werkt aan vliegende taxi's

- Milieuvriendelijke en efficiënte propaanwarmtepomp

- Onderzoekers kijken in detail naar de interfaces in perovskiet-zonnecellen
- Bezos verdedigt inspanningen van Amazon voor cloudproject Pentagon


 Frankrijk waarschuwt Amazon voor onaanvaardbare druk op werknemers
Frankrijk waarschuwt Amazon voor onaanvaardbare druk op werknemers- India's ambitieuze plannen om sanitaire voorzieningen voor iedereen te realiseren, moeten verder kijken dan het bouwen van individuele toiletten
- Kan FraudBuster verzekeraars helpen big data te gebruiken om fraude tegen te gaan?
- Het vrijkomen van radioactieve deeltjes in Fukushima was significant, zegt nieuw onderzoek
- Kunsteducatie kan creatieve tegenverhalen bieden tegen haatzaaiende uitlatingen
- Stof van een gigantische asteroïde-crash veroorzaakte een oude ijstijd
- Tropische storm Taras waterdampconcentraties gezien door NASA's Aqua-satelliet
- Hoe een jong ogende maanvulkaan zijn ware leeftijd verbergt
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
