Wetenschap
Onderzoekers gebruiken speltheorie om beleidsmakers te helpen bij het opstellen van aansprakelijkheidsregels voor ongevallen met zelfrijdende auto's
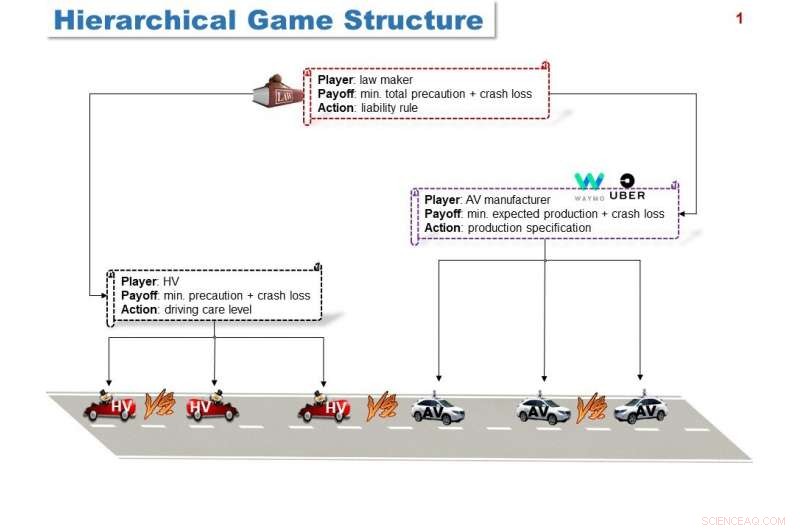
Hiërarchische spelstructuur, ter illustratie van de drielagige hiërarchische strategische interacties tussen de wetgever, de AV-fabrikant, AV's, en HV's op wegen. Elke speler heeft verschillende of zelfs tegenstrijdige doelstellingen, gericht op het selecteren van één strategie om zijn of haar doelstellingen te optimaliseren. Krediet:Sharon Di en Xu Chen/Columbia Engineering
Een recente beslissing van de National Transpiration Safety Board (NTSB) over de Uber-crash in maart 2018 waarbij een voetganger in Arizona om het leven kwam, verdeelde de schuld bij Uber, het autonome voertuig (AV), de veiligheidschauffeur in het voertuig, het slachtoffer, en de staat Arizona. Met de komst van zelfrijdende auto's, de bevindingen van de NTSB roepen een aantal vragen op over de onzekerheid in het huidige wettelijke aansprakelijkheidsstelsel. Bij een ongeval met een AV en een menselijke bestuurder, wie is aansprakelijk? Als beide aansprakelijk zijn, hoe moet de schade door een ongeval tussen hen worden verdeeld?
AV's ontnemen mensen de praktische taak van autorijden en vormen zo een complexe uitdaging voor de huidige wet inzake onrechtmatige daad bij ongevallen, die in de eerste plaats mensen straft. Juridische experts verwachten dat, door het programmeren van aandrijfalgoritmen, zelfrijdende autofabrikanten, inclusief auto-ontwerpers, leveranciers van sensoren, software ontwikkelaars, autoproducenten, en aanverwante partijen die bijdragen aan het ontwerp, productie, en testen, direct invloed hebben op het verkeer. Hoewel deze algoritmen fabrikanten tot onmisbare actoren maken, waarbij de productaansprakelijkheid mogelijk een cruciale rol speelt, beleidsmakers hebben nog geen kwantitatieve methode bedacht om het verlies tussen de zelfrijdende auto en de menselijke bestuurder toe te wijzen.
Om dit probleem aan te pakken, onderzoekers van Columbia Engineering en Columbia Law School hebben een gezamenlijke op fouten gebaseerde aansprakelijkheidsregel ontwikkeld die kan worden gebruikt om zowel zelfrijdende autofabrikanten als menselijke bestuurders te reguleren. Ze stellen een speltheoretisch model voor dat de strategische interacties tussen de wetgever, de zelfrijdende autofabrikant, de zelfrijdende auto, en menselijke chauffeurs, en onderzoeken hoe, naarmate de marktpenetratie van AV's toeneemt, de aansprakelijkheidsregel moet evolueren.
Hun bevindingen worden uiteengezet in een nieuwe studie die op 14 januari zal worden gepresenteerd door Sharon Di, universitair docent civiele techniek en technische mechanica, en Eric Talley, Isidor en Sevilla Sulzbacher hoogleraar rechten, op de 99e jaarlijkse bijeenkomst van de Transportation Research Board in Washington, DC
Hoewel de meeste huidige onderzoeken zich hebben gericht op het ontwerpen van de rij-algoritmen van AV's in verschillende scenario's om de verkeersefficiëntie en veiligheid te waarborgen, ze hebben de gedragsaanpassing van menselijke bestuurders aan AV's niet onderzocht. Di en Talley vroegen zich af wat het 'moral hazard'-effect op mensen is, of het nu gaat om blootstelling aan steeds meer verkeersontmoetingen met AV's, mensen zijn misschien minder geneigd om "gepaste voorzichtigheid" te betrachten wanneer ze worden geconfronteerd met AV's op de weg en op een meer risicovolle manier rijden.
"Menselijke bestuurders zien AV's als intelligente agenten met het vermogen om zich aan te passen aan agressiever en potentieel gevaarlijker menselijk rijgedrag, " zegt Di, die lid is van Columbia's Data Science Institute. "We ontdekten dat menselijke bestuurders kunnen profiteren van deze technologie door onvoorzichtig te rijden en meer risico's te nemen. omdat ze weten dat zelfrijdende auto's ontworpen zouden zijn om conservatiever te rijden."
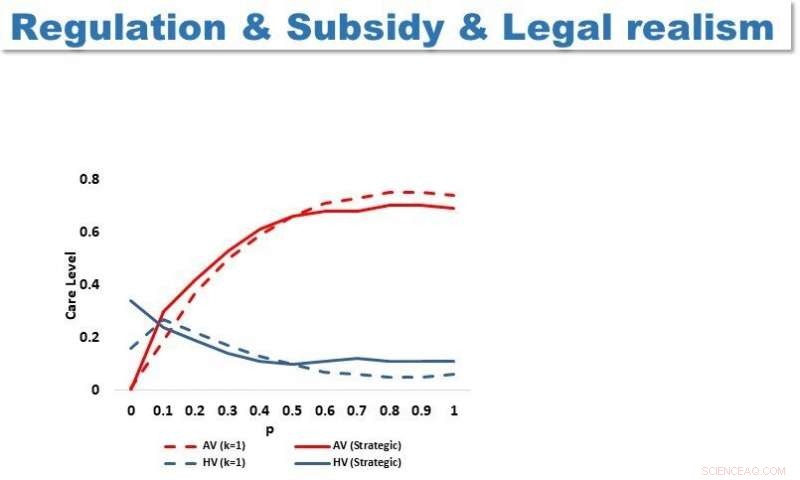
Het team ontdekte dat een optimaal ontworpen aansprakelijkheidsbeleid van cruciaal belang is om te voorkomen dat menselijke bestuurders moreel risico ontwikkelen en om de AV-fabrikant te helpen bij een afweging tussen verkeersveiligheid en productiekosten. Krediet:Sharon Di en Xu Chen/Columbia Engineering
De onderzoekers gebruikten speltheorie om een wereld te modelleren met interactieve spelers die hun eigen acties proberen te selecteren om hun eigen doelen te optimaliseren. De spelers - wetgevers, AV-fabrikanten, AV's, en menselijke chauffeurs - hebben verschillende doelen in het transportecosysteem. Wetgevers willen het verkeer reguleren met verbeterde efficiëntie en veiligheid, zelfrijdende autofabrikanten zijn winstgericht, en zowel zelfrijdende auto's als menselijke bestuurders werken samen op de openbare weg en proberen de beste rijstrategieën te selecteren. Om de complexe interactie tussen alle spelers vast te leggen, de onderzoekers pasten speltheorie toe om te zien welke strategie elke speler kiest, zodat anderen geen misbruik maken van zijn of haar beslissingen.
Het hiërarchische spel hielp het team om het morele risico van menselijke chauffeurs te begrijpen (hoeveel risico chauffeurs zouden kunnen besluiten te nemen), de impact van de AV-fabrikant op de verkeersveiligheid, en de aanpassing van de wetgever aan het nieuwe transportecosysteem. Ze testten het spel en zijn algoritme op een reeks numerieke voorbeelden, biedt inzicht in gedragsevolutie van AV's en HV's naarmate de AV-penetratiegraad toeneemt en naarmate de kosten of omgevingsparameters variëren.
Het team ontdekte dat een optimaal ontworpen aansprakelijkheidsbeleid van cruciaal belang is om te voorkomen dat menselijke bestuurders moreel risico ontwikkelen en om de AV-fabrikant te helpen bij een afweging tussen verkeersveiligheid en productiekosten. Overheidssubsidies aan AV-fabrikanten voor de verlaging van de productiekosten zouden fabrikanten sterk aanmoedigen om AV's te produceren die aanzienlijk beter presteren dan menselijke bestuurders en de algehele verkeersveiligheid en efficiëntie verbeteren. Bovendien, als AV-fabrikanten niet gereguleerd zijn op het gebied van AV-technologiespecificaties of niet naar behoren worden gesubsidieerd, AV-fabrikanten zijn meestal puur winstgericht en destructief voor het algehele verkeerssysteem.
"Het tragische ongeval in Arizona waarbij een zelfrijdende auto betrokken was, lokte enorme aandacht van het publiek en beleidsmakers uit over hoe de lijnen van wettelijke aansprakelijkheid kunnen worden getrokken wanneer AV's communiceren met menselijke bestuurders, fietsers, en voetgangers, Talley voegt toe. "De opkomst van AV's introduceert een bijzonder netelige vorm van onzekerheid in de status-quo, en een die teruggrijpt op AV-productie en -ontwerp. Wettelijke aansprakelijkheid voor ongevallen tussen auto's en voetgangers omvat typisch een complexe berekening van vergelijkende foutbeoordelingen voor elk van de bovengenoemde groepen. De introductie van een autonoom voertuig kan de zaken nog ingewikkelder maken door andere partijen aan de mix toe te voegen, zoals de fabrikanten van hardware en programmeurs van software. En verzekeringsdekking verstoort de zaken nog verder door belanghebbenden van derden erbij te betrekken. We hopen dat onze analytische tools AV-beleidsmakers zullen helpen bij hun regelgevende beslissingen, en daarbij, zal helpen de onzekerheid in de bestaande regelgeving rond AV-technologieën te verminderen."
Di en Talley kijken nu naar meerdere AV-fabrikanten die zich richten op verschillende wereldwijde markten met verschillende technologische specificaties, waardoor de ontwikkeling van rechtsregels nog complexer wordt.
"We weten dat menselijke bestuurders meer risico's zullen nemen en moreel risico zullen ontwikkelen als ze denken dat hun wegomgeving veiliger is geworden. Di merkt op. "Het is duidelijk dat een optimaal ontwerp van aansprakelijkheidsregels cruciaal is om het maatschappelijk welzijn en de verkeersveiligheid te verbeteren met geavanceerde vervoerstechnologieën."
 Veranderend landschap betekent dat sommige Arctische vijvers mogelijk een belangrijke bron van koolstofemissies kunnen zijn
Veranderend landschap betekent dat sommige Arctische vijvers mogelijk een belangrijke bron van koolstofemissies kunnen zijn- Een autonoom voertuig gekoppeld aan een robotlaboratorium bewijst zijn waarde
- Studie van microfossielen brengt extreme opwarming van de aarde en veranderingen in het milieu in kaart
- Kenmerken van een bosecosysteem
- Biologische drankenkartons
Hoofdlijnen
- Onderzoekers vinden een veelbelovende manier om muggen te slim af te zijn
- S-fase: wat gebeurt er tijdens deze subfase van de celcyclus?
- Wat zijn de kenmerken die alle bacteriën gemeenschappelijk hebben?
- Wat is het voordeel van het feit dat het DNA goed is ingepakt in de chromosomen?
- Een nieuwe manier om metabolic engineering te doen
- Wat zijn de structurele delen van de lange botten in het lichaam?
- Waarom verhuizen chloroplasten in Elodea?
- Studie van gierende kraanvogels onthult een band tussen paren zelfs voordat ze de paringsleeftijd hebben bereikt
- Dieetbeperking en levensduur bij mannelijke en hermafrodiete wormen
- Bugatti prijst groene ambities en stormt op volle kracht vooruit

- Nieuw kader beoordeelt, optimaliseert de economische waarde van lithium-ionbatterijen
- Wordt Spotify de nieuwe Tinder? Het is voor dit koppel

- Apple verhoogt de inruilwaarde van oude iPhones om te proberen upgrades naar nieuwe modellen te lokken

- Turbomachine expander biedt efficiënte, veilige strategie voor verwarming, koeling


 Fotochrome bismutcomplexen zijn veelbelovend voor optische geheugenelementen
Fotochrome bismutcomplexen zijn veelbelovend voor optische geheugenelementen- SMAC in de DARQ:de technische trends die 2020 vormgeven
- Onderzoekers ontwikkelen duurzame methode om vanilline te winnen uit houtverwerkingsafval
- Vroege zwarte gaten zijn mogelijk met horten en stoten gegroeid
- Het zijn niet allemaal regenbogen voor Chicago's $ 1 miljard technische eenhoorns
- Welk fysisch mechanisme is verantwoordelijk voor de magnetische eigenschappen van cupraten bij doping?
- Kosmische flitsen zijn er in alle verschillende maten
- Een nieuwe benadering voor het bouwen van efficiënte thermo-elektrische nanomaterialen
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
