Wetenschap
Assembler-robots maken grote constructies van kleine stukjes
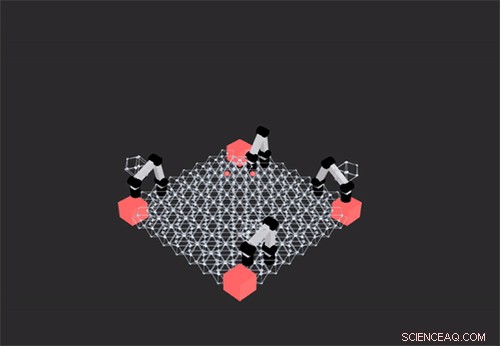
Computersimulatie toont een groep van vier assembler-robots aan het werk bij het bouwen van een driedimensionale structuur. Hele zwermen van dergelijke robots zouden kunnen worden losgelaten om grote constructies te creëren, zoals vliegtuigvleugels of ruimtehabitats. Krediet:Massachusetts Institute of Technology
De hedendaagse commerciële vliegtuigen worden doorgaans in secties vervaardigd, vaak op verschillende locaties—vleugels in één fabriek, rompdelen op een andere, staartcomponenten ergens anders vandaan - en vervolgens in enorme vrachtvliegtuigen naar een centrale fabriek gevlogen voor de eindmontage.
Maar wat als de eindvergadering de enige vergadering was, met het hele vliegtuig opgebouwd uit een groot aantal kleine identieke stukjes, allemaal in elkaar gezet door een leger van kleine robots?
Dat is de visie die afgestudeerde student Benjamin Jenett, werken met professor Neil Gershenfeld in MIT's Centre for Bits and Atoms (CBA), heeft nagestreefd als zijn proefschrift. Het is nu zover dat prototypeversies van dergelijke robots kleine constructies kunnen assembleren en zelfs als een team kunnen samenwerken om grotere assemblages op te bouwen.
Het nieuwe werk verschijnt in het oktobernummer van de IEEE Robotics and Automation Letters, in een paper van Jenett, Gershenfeld, mede-afgestudeerde student Amira Abdel-Rahman, en CBA-alumnus Kenneth Cheung SM '07, doctoraat '12, die nu bij NASA's Ames Research Center is, waar hij het ARMADAS-project leidt om een maanbasis te ontwerpen die kan worden gebouwd met robotassemblage.
"Dit papier is een traktatie, " zegt Aaron Becker, een universitair hoofddocent elektrische en computertechniek aan de Universiteit van Houston, die niet bij dit werk betrokken was. "Het combineert een eersteklas mechanisch ontwerp met adembenemende demonstraties, nieuwe robotachtige hardware, en een simulatiesuite met meer dan 100, 000 elementen, " hij zegt.
Krediet:Massachusetts Institute of Technology
"De kern hiervan is een nieuw soort robotica, die we relatieve robots noemen, " zegt Gershenfeld. Historisch gezien, hij legt uit, er zijn twee brede categorieën robotica:die zijn gemaakt van dure aangepaste componenten die zorgvuldig zijn geoptimaliseerd voor bepaalde toepassingen zoals fabrieksassemblage, en degenen die zijn gemaakt van goedkope in massa geproduceerde modules met veel lagere prestaties. De nieuwe robotten, echter, zijn een alternatief voor beide. Ze zijn veel eenvoudiger dan de vorige, hoewel veel capabeler dan de laatste, en ze hebben het potentieel om een revolutie teweeg te brengen in de productie van grootschalige systemen, van vliegtuigen tot bruggen tot hele gebouwen.
Volgens Gershenfeld, het belangrijkste verschil ligt in de relatie tussen het robotapparaat en de materialen die het hanteert en manipuleert. Met deze nieuwe soorten robots, "je kunt de robot niet van de structuur scheiden - ze werken samen als een systeem, "zegt hij. Bijvoorbeeld, terwijl de meeste mobiele robots zeer nauwkeurige navigatiesystemen nodig hebben om hun positie bij te houden, de nieuwe assembler-robots hoeven alleen maar bij te houden waar ze zich bevinden ten opzichte van de kleine subeenheden, voxels genoemd, waar ze momenteel mee bezig zijn. Elke keer dat de robot een stap op de volgende voxel zet, het past zijn gevoel voor positie aan, altijd in relatie tot de specifieke onderdelen waar het op dat moment op staat.
De achterliggende visie is dat net zoals de meest complexe beelden kunnen worden gereproduceerd door een array van pixels op een scherm te gebruiken, vrijwel elk fysiek object kan worden nagemaakt als een reeks kleinere driedimensionale stukken, of voxels, die zelf uit eenvoudige stutten en knooppunten kunnen bestaan. Het team heeft aangetoond dat deze eenvoudige componenten kunnen worden opgesteld om de lasten efficiënt te verdelen; ze bestaan grotendeels uit open ruimte, zodat het totale gewicht van de constructie tot een minimum wordt beperkt. De units kunnen door de eenvoudige monteurs worden opgepakt en naast elkaar worden geplaatst, en vervolgens aan elkaar vastgemaakt met behulp van vergrendelingssystemen die in elke voxel zijn ingebouwd.
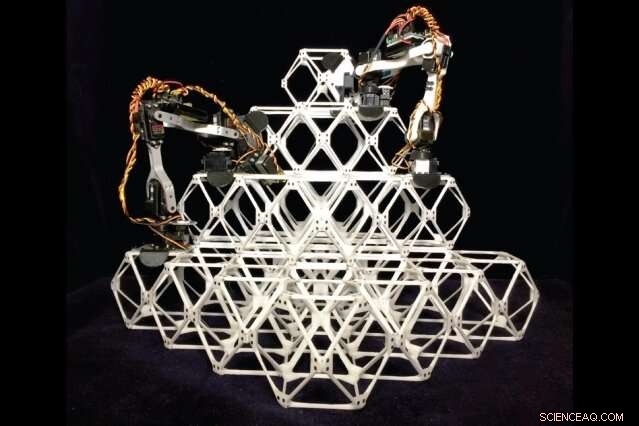
Foto toont twee prototype assembler-robots aan het werk die een reeks kleine eenheden samenstellen, bekend als voxels, tot een grotere structuur. Krediet:Benjamin Jenett
De robots zelf lijken op een kleine arm, met twee lange segmenten die in het midden scharnieren, en inrichtingen voor het vastklemmen op de voxelstructuren aan elk uiteinde. De eenvoudige apparaten bewegen als inchwormen, vooruitgaan langs een rij voxels door herhaaldelijk hun V-vormige lichamen te openen en te sluiten om van de ene naar de andere te gaan. Jenett heeft de kleine robots BILL-E genoemd (een knipoog naar de filmrobot WALL-E), wat staat voor Bipedal Isotropic Lattice Locomoting Explorer.
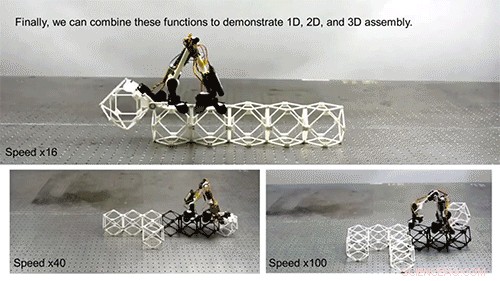
Jenett heeft verschillende versies van de assemblers gebouwd als proof-of-concept-ontwerpen, samen met bijbehorende voxel-ontwerpen met vergrendelingsmechanismen om ze gemakkelijk van zijn buren te bevestigen of los te maken. Hij heeft deze prototypes gebruikt om de montage van de blokken tot lineaire, tweedimensionaal, en driedimensionale structuren. "We stoppen de precisie niet in de robot; de precisie komt van de structuur" die geleidelijk vorm krijgt, zegt Jenet. "Dat is anders dan alle andere robots. Hij moet alleen weten waar zijn volgende stap is."
Terwijl het werkt aan het samenstellen van de stukken, elk van de kleine robots kan zijn stappen over de structuur tellen, zegt Gershenfeld, wie is de directeur van CBA. Samen met navigatie, hierdoor kunnen de robots fouten bij elke stap corrigeren, het elimineren van de meeste complexiteit van typische robotsystemen, hij zegt. "Het mist de meeste van de gebruikelijke controlesystemen, maar zolang het geen stap overslaat, hij weet waar hij is." Voor praktische montagetoepassingen, zwermen van dergelijke eenheden zouden kunnen samenwerken om het proces te versnellen, dankzij door Abdel-Rahman ontwikkelde besturingssoftware waarmee de robots hun werk kunnen coördineren en elkaar niet in de weg zitten.
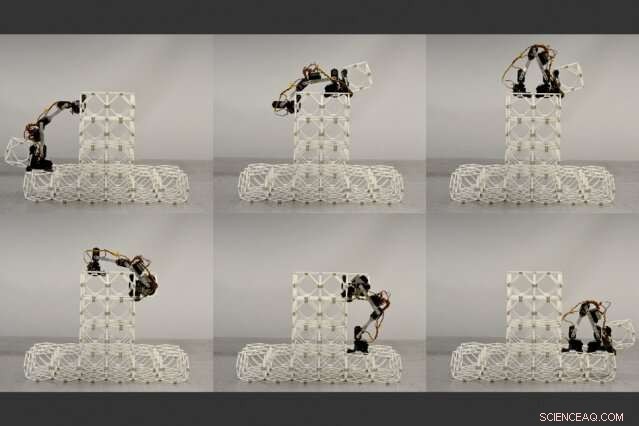
Opeenvolging van foto's toont een assembler-robot aan het werk, het dragen van een structurele eenheid over de bovenkant en langs de andere kant van een constructie in aanbouw. Krediet:Benjamin Jenett
Dit soort assemblage van grote structuren van identieke subeenheden met behulp van een eenvoudig robotsysteem, net als een kind dat een groot kasteel in elkaar zet uit LEGO-blokken, heeft al de interesse gewekt van enkele grote potentiële gebruikers, inclusief NASA, MIT's medewerker aan dit onderzoek, en het Europese ruimtevaartbedrijf Airbus SE, die ook hielp om de studie te sponsoren.
Een voordeel van een dergelijke assemblage is dat reparaties en onderhoud gemakkelijk kunnen worden uitgevoerd door hetzelfde soort robotproces als de initiële assemblage. Beschadigde secties kunnen van de structuur worden gedemonteerd en worden vervangen door nieuwe, het produceren van een structuur die net zo robuust is als het origineel. "Ontbouwen is net zo belangrijk als bouwen, "Gershenfeld zegt, en dit proces kan ook worden gebruikt om in de loop van de tijd wijzigingen of verbeteringen aan het systeem aan te brengen.
"Voor een ruimtestation of een maanhabitat, deze robots zouden op de structuur leven, het continu onderhouden en repareren, ' zegt Jenet.
uiteindelijk, dergelijke systemen kunnen worden gebruikt om hele gebouwen te bouwen, vooral in moeilijke omgevingen zoals in de ruimte, of op de maan of Mars, zegt Gershenfeld. Dit zou de noodzaak kunnen elimineren om grote voorgemonteerde constructies helemaal vanaf de aarde te verzenden. In plaats daarvan zou het mogelijk kunnen zijn om grote batches van de kleine subeenheden te verzenden - of ze te vormen uit lokale materialen met behulp van systemen die deze subeenheden op hun eindbestemming zouden kunnen activeren. "Als je een jumbojet kunt maken, je kunt een gebouw maken, ' zegt Gershenfeld.
Sandor Fekete, directeur van het Institute of Operating Systems and Computer Networks aan de Technische Universiteit van Braunschweig, in Duitsland, die niet bij dit werk betrokken was, zegt "Ultralicht, digitale materialen zoals [deze] openen verbazingwekkende perspectieven voor het construeren van efficiënte, complex, grootschalige constructies, die van vitaal belang zijn in lucht- en ruimtevaarttoepassingen."
Maar het assembleren van dergelijke systemen is een uitdaging, zegt Fekete, die van plan is zich bij het onderzoeksteam aan te sluiten voor de verdere ontwikkeling van de controlesystemen. "Dit is waar het gebruik van kleine en eenvoudige robots de volgende doorbraak belooft:robots worden niet moe of verveeld, en het gebruik van veel miniatuurrobots lijkt de enige manier om deze cruciale klus te klaren. Dit uiterst originele en slimme werk van Ben Jennet en medewerkers maakt een gigantische sprong naar de constructie van dynamisch verstelbare vliegtuigvleugels, enorme zonnezeilen of zelfs herconfigureerbare ruimtehabitats."
In het proces, Gershenfeld zegt, "we hebben het gevoel dat we een nieuw veld van hybride materiaal-robotsystemen ontdekken."
Dit verhaal is opnieuw gepubliceerd met dank aan MIT News (web.mit.edu/newsoffice/), een populaire site met nieuws over MIT-onderzoek, innovatie en onderwijs.
 Scholen moleculaire vissen kunnen beeldschermen verbeteren
Scholen moleculaire vissen kunnen beeldschermen verbeteren- As uit elektriciteitscentrales verwerkt tot reagentia voor waterzuivering
- Polymeren voorkomen mogelijk gevaarlijke nevel tijdens tandartsbezoek
- Een zeer alkalisch stabiel Co3O4@Co-MOF-composiet voor hoogwaardige elektrochemische energieopslag
- Laat de zon binnen:zelfreinigend membraan onder behandeling met zichtbaar licht
Hoofdlijnen
- Betere mensen maken - Het huwelijk tussen mens en machine
- Lijst met waterverontreinigende stoffen
- De nadelen van gelelektroforese
- Wat zijn de functies van zetmeel in plantencellen?
- Hoe regenereert de huid?
- Wat zijn de verschillen van eenvoudig en gestratificeerd weefsel?
- Sterfgevallen chimpansees in Oeganda toegeschreven aan menselijk verkoudheidsvirus
- Nieuwe strategie zou bestaande medicijnen in staat kunnen stellen bacteriën te doden die chronische infecties veroorzaken
- Hoe zijn dieren en planten vergelijkbaar?
- eenvoudige verandering, grote impact:scheikundigen bevorderen duurzame batterijtechnologie

- GymCam houdt oefeningen bij die draagbare monitoren niet kunnen

- Snellaadsysteem voor E-bikes

- Amerikaanse productie zakt in recessie te midden van handelsoorlogen

- Google Foto's werkt samen met CVS en Walmart voor afdrukken


 Lijst van vissen die bodemaanvoerders zijn
Lijst van vissen die bodemaanvoerders zijn- Studie verbindt klimaatbeleid, koolstofemissies van permafrost
- Startup schaalt grafeenproductie op ontwikkelt biosensoren en supercondensatoren
- Brand in Californië annuleert fietstocht roept op tot evacuaties
- Natuurkundigen gebruiken nanostructuren om fotonen vrij te maken voor zeer efficiënte witte OLED's
- Het fenomeen van polymorfisme in de atomaire structuur van het methylprednisolonaceponaat
- Gammastralen reiken voorbij de grenzen van het licht
- Een waterstofgenerator op nanoschaal
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- Italian | Spanish | Portuguese | Dutch | Danish | Norway | French | Swedish | German |

-
Wetenschap © https://nl.scienceaq.com
