Wetenschap
Lopende kakkerlakken helpen onderzoekers duizelingwekkende robots stabiel te houden

De robot die in dit experiment werd gebruikt, was een machine van het merk Minitaur met poten. Krediet:Georgia Tech / Neveln
oei, een kakkerlak! Maar het ritst weg voordat de mep verschijnt. Nutsvoorzieningen, onderzoekers hebben gebruik gemaakt van de uitstekende scurry-vaardigheden van de bug om een slim eenvoudige methode te creëren om de voortbeweging in robots te beoordelen en te verbeteren.
Normaal gesproken, vervelend modelleren van mechanica, elektronica, en informatiewetenschap is vereist om te begrijpen hoe de bewegende delen van insecten of robots soepel coördineren om ze te plaatsen. Maar in een nieuwe studie biomechanica-onderzoekers van het Georgia Institute of Technology brachten de sprints van kakkerlakken tot handige principes en vergelijkingen die ze vervolgens gebruikten om een testrobot beter te laten rondlopen.
De methode vertelde de onderzoekers hoe elk been op zichzelf werkt, hoe ze allemaal samenkomen als een geheel, en de harmonie of het gebrek daaraan in hoe ze het doen. Ondanks de volkomen uiteenlopende bewegingsdynamiek van bugs en bots, de nieuwe methode werkte voor beide en zou moeten werken voor andere robots en dieren, te.
De biologische robot, de kakkerlak, was de veel betere loper met neurologische signalen die zes onberispelijk geëvolueerde benen leidden. De mechanische robot, een consumentenmodel, had vier stompe benen en geen zenuwstelsel, maar vertrouwde in plaats daarvan voor motoriekcontrole op grove fysieke krachten die door het chassis reisden als ruwe signalen om zijn onhandige gang ruwweg te coördineren.
"De robot was veel omvangrijker en kon zijn omgeving nauwelijks voelen. De kakkerlak had veel zintuigen en kan zich beter aanpassen aan ruw terrein. Hobbels zo hoog als zijn heupen zouden hem helemaal niet vertragen, " zei Izaak Neveln, de eerste auteur van de studie, die tijdens de studie een postdoctoraal onderzoeker was in het laboratorium van Simon Sponberg bij Georgia Tech.
Geavanceerde eenvoud
De methode, of "meten, " zoals de studie het noemt, deze enorme verschillen overstegen, die door dieren geïnspireerde robotica doordringen.
"De maatregel is algemeen (universeel) in de zin dat hij kan worden gebruikt, ongeacht of de signalen neurale piekpatronen zijn, kinematica, spanningen of krachten en is niet afhankelijk van de specifieke relatie tussen de signalen, " schreven de auteurs van de studie.
Het maakt niet uit hoe een bug of een bot werkt, de wiskundige invoer en uitvoer van de meting zijn altijd in dezelfde eenheden. De maatregel zal niet altijd de noodzaak van modellering wegnemen, maar het staat om modellering te verkorten en te begeleiden en pijnlijke misstappen te voorkomen.
De auteurs publiceerden de studie in het tijdschrift Natuurcommunicatie in augustus 2019. Het onderzoek werd gefinancierd door de National Science Foundation. Sponberg is een assistent-professor in Georgia Tech's School of Physics en in de School of Biological Sciences.
De schommelingen van de poten van de kakkerlak kunnen op dezelfde manier worden weergegeven als de schommelingen van een slinger in sinusgolven. Deze leiden tot een beter wiskundig begrip van de voortbeweging van het insect. Krediet:Georgia Tech / Sponberg / Neveln
Centralisatie versus decentralisatie
Vaak stuurt een bot of een dier veel loopsignalen door een centraal systeem om de voortbeweging te harmoniseren, maar niet alle signalen zijn gecentraliseerd. Zelfs bij mensen, hoewel voortbeweging sterk afhankelijk is van signalen van het centrale zenuwstelsel, sommige neurale signalen zijn beperkt tot delen van het lichaam; het zijn gelokaliseerde signalen.
Sommige insecten lijken te bewegen met weinig centralisatie, zoals stokwantsen, ook wel wandelstokken genoemd, wiens benen bijna onafhankelijk rondscharrelen. Stick bugs zijn wankele lopers.
"Het idee was dat de stickbugs de meer gelokaliseerde controle over beweging hebben, overwegende dat een kakkerlak erg snel gaat en stabiel moet blijven, en de bewegingscontrole is waarschijnlijk meer gecentraliseerd, meer klokachtig, ' zei Nevel.
Een sterke centralisatie van signalen coördineert de voortbeweging over het algemeen beter. Het kan een code zijn die door de bedrading van een ingewikkelde robot reist, de centrale neuronen van een kakkerlak die zijn poten synchroniseren, of het onhandige chassis van de robot kantelt weg van een been dat op de grond bonst en zo gewicht op een ander been legt. Robotici moeten de verschillen doorzien en het samenspel van de lokale en centrale signalen van een locomotor achterhalen.
Coole natuurkunde
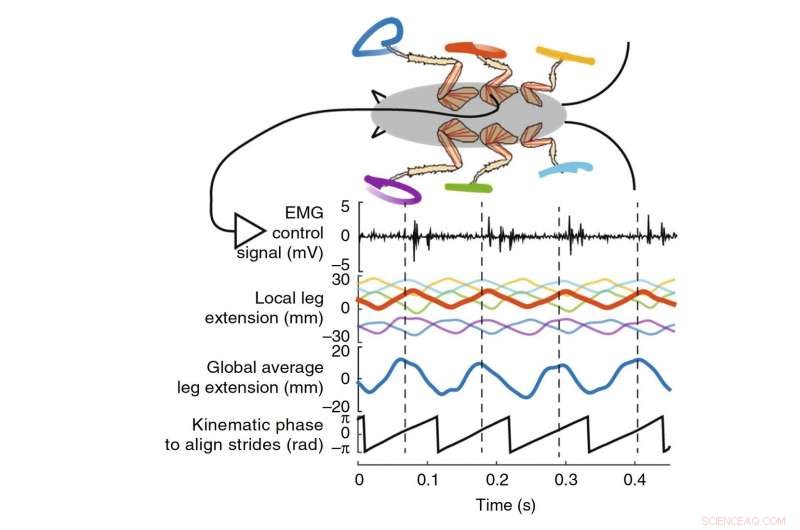
De nieuwe "maatregel" doet dit door te focussen op een overkoepelend fenomeen in de loopbenen, die kan worden gezien als slinger heen en weer bewegen. Voor een geweldige voortbeweging, ze moeten synchroniseren in zogenaamde fasekoppelingsoscillaties.
Een leuke, eenvoudig experiment illustreert dit natuurkundige principe. Als een paar, zeg zes, metronomen - tikkende ritmeslingers die pianoleraren gebruiken - slingeren niet synchroon, en je plaatst ze allemaal op een platform dat vrij zwaait met de zwaaien van de metronoom, de schommels zullen synchroon synchroon lopen.
de fasen, of aanwijzingen, van hun oscillaties koppelen met elkaar door hun samengestelde mechanische impulsen door het platform te centraliseren. Dit specifieke voorbeeld van fasekoppeling is mechanisch, maar het kan ook computationeel of neurologisch zijn, zoals bij de kakkerlak.
Zijn poten zouden analoog zijn aan de zwaaiende metronomen, en centrale neuromusculaire activiteit analoog aan het vrij zwaaiende platform. In de kakkerlak, niet alle zes de benen zwaaien in dezelfde richting.
"Hun synchronisatie is niet uniform. Drie benen zijn in fase met elkaar gesynchroniseerd - de voor- en achterbenen van de ene kant met het middelste been van de andere kant - en die drie zijn uit fase gesynchroniseerd met de andere drie, ' zei Neveln. 'Het is een afwisselende driepootgang. Het ene statief van drie poten wisselt af met het andere statief van drie poten."
Nutteloos pogen
En net als pendula, de schommelingen van elk been kunnen als een golf worden weergegeven. Alle golven van de benen kunnen worden gemiddeld tot een algemene scurry-golf van de voorn en vervolgens worden ontwikkeld tot meer bruikbare wiskunde die centralisatie in verband brengt met decentralisatie en factoren zoals entropie die de motoriekcontrole kunnen uitschakelen.
De resulterende principes en wiskunde kwamen de onhandige robot ten goede, die sterke gedecentraliseerde signalen heeft in zijn beenmotoren die reageren op beencontact met de grond, en gecentraliseerde controle zwakker dan de stick bug's. De onderzoekers brachten de bewegingen van de robot in kaart, te, maar ze resulteerden niet in de keurig gesynchroniseerde groep golven die de kakkerlak had.
De onderzoekers wendden zich met de principes en wiskunde tot de onhandige robot, die aanvankelijk niet in orde was - nutteloos bokkend of huppelend als een pogo-stick. Vervolgens versterkten de wetenschappers de gecentraliseerde controle door het chassis opnieuw te wegen om het coherenter te laten bewegen.
"De metronomen op het platform zijn mechanische koppelingen, en onze robot coördineert de besturing op die manier, " zei Neveln. "Je kunt de mechanische koppeling van de robot veranderen door zijn gewichten te verplaatsen. Met de maatstaf die we ontwikkelden op basis van de kakkerlak konden we voorspellen welke veranderingen dit zou veroorzaken."
Kakkerlak verrassingen
De onderzoekers bedraadden ook specifieke kakkerlakken en neuronen om hun syncopen met de snelle golven te observeren. Zeventien kakkerlakken namen er 2, 982 stappen om de principes en wiskunde te informeren, en de bugs veroorzaakten ook verrassingen voor de onderzoekers.
Eén viel op:de wetenschappers hadden gedacht dat signalering meer gecentraliseerd was toen de kakkerlak versnelde, maar in plaats daarvan, zowel centrale als lokale signalering versterkt, misschien een verdubbeling van de boodschap:Ren!
 Waarom sommige groenen bruin worden in historische schilderijen
Waarom sommige groenen bruin worden in historische schilderijen- Dit molecuul is gemaakt van suiker, in de vorm van een donut, en gevormd met behulp van licht
- Het uitlaatgas van een elektriciteitscentrale kan worden teruggewonnen en gebruikt als grondstof voor reactie
- Wetenschappers bakken glutenvrij brood met een revolutionaire technologie
- Wat is een verbinding?
- Methaan uit toendra, oceaanbodem piekte niet tijdens vorige natuurlijke opwarmingsperiode
- Studie:minder vervuiling in rivieren in New Jersey, maar meer zout
- Het verlies van poolijs is zorgwekkend, maar de reus die zich in het zuiden beweegt, kan nog erger zijn
- Italiaanse zeeën spreken:geen toeristen of boten betekent schoner water
- Verkeersvervuiling neemt af tijdens lockdown, maar andere risico's voor de luchtkwaliteit nemen toe
Hoofdlijnen
- Nieuwe software kan binnen enkele minuten iemands identiteit verifiëren aan de hand van hun DNA
- Cheerleading Science Fair Project Ideas
- Wat zijn de processen waarbij macromoleculen worden gevormd?
- Hoe verschilt gisting van cellulaire ademhaling?
- Hoe verschilt mitose in de cellen van dieren en planten?
- 10 vreemdste bronnen voor antibiotica
- Kleine rode dieren schieten in het donker onder het ijs van een bevroren meer in Quebec
- Nieuwe filmtechniek onthult bacteriële signalering in scherpere resolutie
- Genotype & Phenotype Definitie
- Algoritmische integriteitsadvocaat:de implicaties van menselijke interactie met technologie

- Gastnetwerken van routers hebben onvoldoende beveiliging, volgens onderzoekers

- Livestreamed bloedbad betekent dat het tijd is om Facebook Live af te sluiten

- Onderzoekers tonen aan dat vliegtuigbrandstoffen gemaakt van planten kostenconcurrerend kunnen zijn met conventionele fossiele brandstoffen
- Trapkracht:de opkomst van bakfietsen in Duitsland


 Engineering van een polymeernetwerk om op verzoek als actieve camouflage te fungeren
Engineering van een polymeernetwerk om op verzoek als actieve camouflage te fungeren- Hoe zijn schimmels en planten vergelijkbaar?
- Oud DNA onthult het genetische landschap van mensen die zich voor het eerst in Oost-Azië vestigden
- Apparaat om ontstekingen thuis te meten
- De druk is weg en de supergeleiding op hoge temperatuur blijft
- Duitsland is het eldorado van de EU voor overvallen op geldautomaten
- Franciscaans museum in Jeruzalem toont leven in Jezus tijd
- NASA onderzoekt structurele veranderingen in de tropische storm Gonzalos
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
