Wetenschap
Stanford Doggo:een zeer wendbare viervoeter
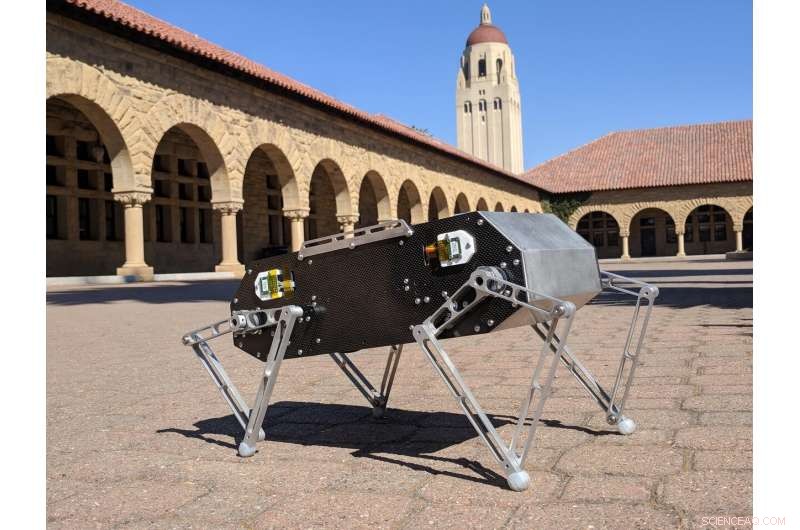
Stanford Doggo. Krediet:Kau et al.
Onderzoekers van Stanford University hebben onlangs een open-source viervoetige robot gemaakt, Stanford Doggo genaamd. hun robot, gepresenteerd in een paper dat vooraf is gepubliceerd op arXiv en zal worden gepubliceerd door IEEE Explore , overtreft de prestaties van veel geavanceerde robots op poten op het gebied van verticale springbehendigheid.
"Ongeveer anderhalf jaar geleden Ik begon het subteam Extreme Mobility bij Stanford Student Robotics, " Nathan Kau, een van de onderzoekers die het onderzoek heeft uitgevoerd, vertelde TechXplore. "We waren geïnteresseerd in het bouwen van behendige robots die omgevingen konden verkennen waar wiel- of vliegende voertuigen niet effectief zouden zijn. Er bestaan al een paar echt geweldige robots die in dit soort omgevingen kunnen werken, maar ze waren vrij duur, aangepaste ontwerpen die we niet zouden kunnen repliceren. Dus vorig jaar we wilden een goedkope vierpotige robot ontwerpen en prototypen, geïnspireerd door deze groepen, en Stanford Doggo is het resultaat van onze inspanningen."
De door Kau en zijn collega's ontwikkelde robot heeft vier poten, die elk worden aangedreven door twee motoren. Riemaandrijvingen verbinden de motoren met de assen van de beenstangen, waardoor de schakels met een derde van de snelheid van de motoren draaien. Deze snelheidsreductie verdrievoudigt bijna het koppel, en de verhouding is laag genoeg om ervoor te zorgen dat krachten uit de omgeving door de motor worden waargenomen.
"Dit effect is vergelijkbaar met fietsen in een lage versnelling, en het is gemakkelijker om hobbels in de weg in je voeten te voelen dan in een hoge versnelling, " legde Kau uit. "Dit soort mechanismen, zogenaamde quasi-direct drive actuatoren, zijn nu enigszins gebruikelijk in pootrobots. Echter, we ontdekten dat weinig of geen groepen dit type actuator gebruikten op kleinere, goedkope looprobots."
Stanford Doggo is een zeer wendbare en goedkope robot die gemakkelijk kan worden gerepliceerd. Opmerkelijk, de robot heeft een nieuw record gevestigd voor verticale springbehendigheid bij elke robot of elk dier, verdubbeling van de spronghoogte van eerdere viervoetige robots. Stanford Doggo is ook veel goedkoper dan andere pootrobots, die doorgaans tien- of honderdduizenden dollars kosten.
"In totaal, Stanford Doggo kost ongeveer $ 3000 USD om te bouwen, inclusief alle fabricagekosten die u zou moeten maken als u geen dure werktuigmachines zoals freesmachines of draaibanken heeft, " zei Kau. "De lage kosten betekenen dat de robot toegankelijker is voor anderen, vooral als ze zich niet in een universitair laboratorium bevinden. Het belangrijkste kenmerk ervan, echter, is dat het draait op open-source hardware en software en dat we gedetailleerde plannen hebben vrijgegeven, onderdelenlijsten en instructies."
In een reeks evaluaties uitgevoerd door Kau en zijn collega's, Stanford presteerde aanzienlijk beter dan andere viervoetige robots. Zijn verticale springbehendigheid, een maat voor de gemiddelde verticale snelheid, kwam overeen met die van het meest wendbare dier en overtrof die van de best presterende robot met 22 procent. Verschillende andere interessante robots worden momenteel ontwikkeld, dus binnenkort kunnen de titels van Stanford Doggo veranderen. Niettemin, zijn verticale springbehendigheid blijft zeer opmerkelijk.
"We hopen dat steeds meer laboratoria nieuwe besturingstechnieken kunnen testen met onze robot als platform, " zei Kau. "We denken dat als meer mensen aan dit soort robots werken, ze zullen sneller klaar zijn voor toepassingen in de echte wereld, zoals de levering van kritieke voorraden of zoek- en reddingsacties. We hopen ook dat onze robot studenten zal inspireren om het gebied van robotica met poten te gaan verkennen. Het is over het algemeen een duur gebied van robotica om in te werken, dus we hopen dat Stanford Doggo de toetredingsdrempel zal verlagen."
Kau en zijn collega's zijn erin geslaagd de allereerste goedkope en zeer wendbare viervoeter te ontwikkelen die is ontworpen voor onderzoekstoepassingen. Stanford Doggo is volledig open-source en is gebouwd met zeer weinig aangepaste onderdelen, dus het kan gemakkelijk opnieuw worden gemaakt. De onderzoekers hopen dat andere robotica-teams hun robot zullen voortbouwen en verbeteren, hun onderzoek verder te ontwikkelen.
Kau en zijn collega's werken ook aan een grotere versie van Stanford Doggo, genaamd Stanford-woofer. Stanford Woofer is ongeveer twee keer zo groot als Doggo en kan ongeveer 6 kg extra uitrusting dragen, zoals sensoren en een robotarm.
"Stanford Doggo is nog steeds een lopend project, " voegde Kau eraan toe. "Bijvoorbeeld, we werken aan de integratie van een volledige reeks sensoren in de robot, inclusief LIDAR. Een ander deelproject is om de robot er wat minder kaal en benaderbaar uit te laten zien, vooral omdat we denken dat dit een effectief platform kan zijn voor educatie en outreach. We schrijven ook een uitgebreide Instructable als aanvulling op onze bestaande open source-materialen, die stapsgewijze instructies geeft over hoe u uw eigen Stanford Doggo kunt bouwen."
© 2019 Wetenschap X Netwerk
 Bedrieglijk eenvoudig proces kan de recycling van kunststoffen stimuleren
Bedrieglijk eenvoudig proces kan de recycling van kunststoffen stimuleren- Nieuwe legering om loodprobleem in drinkwater op te lossen
- De eigenschappen van polyethyleen
- Een onderzoeksteam ontwikkelt biotransistoren die de kleinste signalen kunnen detecteren
- Een RNA-sleutel die de aangeboren immuniteit ontgrendelt
- Feiten over de Atlantische kustvlaktes
- Mariene reservaten zijn van vitaal belang, maar staan onder druk
- Brand in Spanje bij Werelderfgoed onder controle
- Rapport:ik kan El Nino niet de schuld geven van de wereldwijde piek in maart (update)
- Sneeuw heeft mogelijk een aantal bloemen vertraagd voor de eerste dag van de lente
Hoofdlijnen
- Gaan we de zesde grote uitsterving op aarde in?
- 2 Voorbeelden van Heterozygote eigenschappen
- Angiogenese versus vasculogenese
- Verfijning van pesticiden om ongedierte te doden, geen bijen
- Zoogdier waarvan lang gedacht werd dat het uitgestorven was in Australië duikt weer op
- Groene Brexit laten werken voor landbouw en milieu
- Waarom zijn cellen belangrijk voor levende organismen?
- Het Bohr-model:snel vervangen maar nooit vergeten
- Zich in het volle zicht verbergen - Ontdekking roept vragen op over de schaal van de over het hoofd geziene biodiversiteit
- Twitter bereidt kortstondige tweets voor, begint met testen in Brazilië

- Amazon aangeprezen als grote overwinning voor NY, maar wiskunde is complexer

- EU herlanceert druk om WhatsApp te reguleren Skype op privacy

- Witte Huis krijgt rapport dat automatische tarieven zou kunnen activeren

- Berg de gereedschapskist op - nieuwe robot monteert IKEA stoelen


 Hoe snel kunnen bosbranden zich verspreiden?
Hoe snel kunnen bosbranden zich verspreiden? - Bebaarde Vs. Non-Bearded Silkies
- Ladingsoverdracht binnen geanalyseerde overgangsmetaalkleurstoffen
- Hoe beïnvloeden oceaan- en windstromen weer en klimaat?
- Studie onthult inzichten in de aard van protoplanetaire schijf rond HD 169142
- Salesforce koopt Tableau Software in een deal van $ 15,7 miljard in aandelen
- Kunstmatige intelligentie:ARC-testfocus gaat verder dan feitenvragen
- Hoe bereid ik ureumoplossing voor?
- Elektronica
- Biologie
- Zonsverduistering
- Wiskunde
- French | Italian | Spanish | Portuguese | Swedish | German | Dutch | Danish | Norway |

-
Wetenschap © https://nl.scienceaq.com
